TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092909
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208311
出願日
2023-12-11
発明の名称
ロボット
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250616BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】可動領域が制限され難いロボットを提供する。
【解決手段】ロボットでは、基端側クランクは、先端部駆動源と接続されている基端側第1クランクアームと、基端側第1クランクアームと並んで配置されている基端側第2クランクアームと、基端側第1クランクアームと基端側第2クランクアームとを連結している基端側クランクピンと、を有し、先端側クランクは、先端部と接続されている先端側第1クランクアームと、先端側第1クランクアームと並んで配置されている先端側第2クランクアームと、先端側第1クランクアームと先端側第2クランクアームとを連結している先端側クランクピンと、を有し、第1リンクは、基端側第2クランクアームおよび先端側第2クランクアームに連結され、第2リンクは、基端側クランクピンおよび先端側クランクピンに連結されている。
【選択図】図4
特許請求の範囲
【請求項1】
基端部と、
前記基端部に接続され、前記基端部に対して第1回動軸まわりに回動する中央部と、
前記中央部に接続され、前記中央部に対して第2回動軸まわりに回動する先端部と、
前記基端部に収容され、前記先端部を駆動するための先端部駆動源と、
前記先端部駆動源と前記先端部とを連結するリンク機構と、を有し、
前記リンク機構は、前記第1回動軸まわりに回動する基端側クランクと、前記先端部に接続され、前記先端部と共に前記第2回動軸まわりに回動する先端側クランクと、前記基端側クランクと前記先端側クランクとを連結する第1リンクおよび第2リンクと、を有し、
前記基端側クランクは、前記先端部駆動源と接続されている基端側第1クランクアームと、前記基端側第1クランクアームと並んで配置されている基端側第2クランクアームと、前記基端側第1クランクアームと前記基端側第2クランクアームとを前記第1回動軸からずれた位置で連結している基端側クランクピンと、を有し、
前記先端側クランクは、前記先端部と接続されている先端側第1クランクアームと、前記先端側第1クランクアームと並んで配置されている先端側第2クランクアームと、前記先端側第1クランクアームと前記先端側第2クランクアームとを前記第2回動軸からずれた位置で連結している先端側クランクピンと、を有し、
前記第1リンクは、前記基端側第2クランクアームおよび前記先端側第2クランクアームに対して前記基端側第1クランクアームおよび前記先端側第1クランクアームと反対側に位置し、前記基端側第2クランクアームおよび前記先端側第2クランクアームに連結され、
前記第2リンクは、前記基端側第1クランクアームおよび前記先端側第1クランクアームと前記基端側第2クランクアームおよび前記先端側第2クランクアームとの間に位置し、前記基端側クランクピンおよび前記先端側クランクピンに連結されていることを特徴とするロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記先端部が前記先端側第1クランクアームを兼ねている請求項1に記載のロボット。
【請求項3】
前記リンク機構は、前記中央部内に配置されている請求項1に記載のロボット。
【請求項4】
前記基端部に収容され、前記中央部を駆動するための中央部駆動源と、
前記中央部駆動源からの入力を減速して前記中央部に伝達する中央部減速機と、
前記中央部減速機に対して前記基端側クランクと反対側に位置し、前記先端部駆動源からの入力を減速して前記基端側クランクに伝達する先端部減速機と、を有し、
前記基端側クランクは、前記中央部減速機を貫通して配置され、前記基端側第1クランクアームと前記先端部減速機とを連結するクランクシャフトを有する請求項1に記載のロボット。
【請求項5】
前記基端部に収容され、前記中央部を駆動するための中央部駆動源と、
前記中央部駆動源からの入力を減速して前記中央部に伝達する中央部減速機と、
前記中央部減速機に対して前記基端側クランクと反対側に位置し、前記先端部駆動源からの入力を減速して前記基端側クランクに伝達する先端部減速機と、を有し、
前記先端部減速機が前記基端側第1クランクアームを兼ね、前記基端側クランクピンが前記中央部減速機を貫通して前記先端部減速機に連結されている請求項1に記載のロボット。
【請求項6】
前記第1リンクおよび前記第2リンクの少なくとも一方は、長さ調節機構を有する請求項1に記載のロボット。
【請求項7】
前記基端側クランクにおいて、前記基端側第1クランクアームと前記基端側第2クランクアームとのクランク角は、20°以上160°以下であり、
前記先端側クランクにおいて、前記先端側第1クランクアームと前記先端側第2クランクアームとのクランク角は、20°以上160°以下である請求項1に記載のロボット。
【請求項8】
前記基端側クランクは、前記基端側第1クランクアームと前記基端側第2クランクアームとのクランク角を調節するクランク角調節機構を有する請求項1に記載のロボット。
【請求項9】
前記先端側クランクは、前記先端側第1クランクアームと前記先端側第2クランクアームとのクランク角を調節するクランク角調節機構を有する請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1には、アームの先端重量を軽くし、アームの根元に掛かる負荷を小さくすることのできる平行リンク式ロボットが記載されている。このような平行リンク式ロボットは、ロボット基台と、ロボット基台に対して第1回動軸まわりに回動可能に連結されたロボット胴と、ロボット胴に対して第2回動軸まわりに回動可能に連結された第1のロボットアームと、第1のロボットアームに対して第3回動軸まわりに回動可能に連結された第2のロボットアームと、第2のロボットアームに対して第4回動軸まわりに回動可能に連結されたロボット手首と、第1のロボットアームと第2のロボットアームとを連結する駆動リンクと、有する。
【0003】
また、駆動リンクは、第1のロボットアームに対して回動可能に連結された下リンク要素と、第2のロボットアームに対して固定された上リンク要素と、下、上リンク要素を連結する第1のリンク棒および第2のリンク棒と、を有する。また、下リンク要素は、第1のロボットアームに対して第2回動軸まわりに回動可能なクランクであり、第1のリンク腕と、第2のリンク腕と、第1のリンク腕と第2のリンク腕とを連結する結合部と、を有する。一方、上リンク要素は、第2のロボットアームに固定されたクランクであり、第1のリンク腕と、第2のリンク腕と、第1のリンク腕と第2のリンク腕とを連結する結合部と、を有する。そして、下、上リンク要素の第1のリンク腕同士が第1のリンク棒によって連結され、下、上リンク要素の第2のリンク腕同士が第2のリンク棒によって連結されている。そのため、下リンク要素が第2回動軸まわりに回動すると、上リンク要素が第3回動軸まわりに回動し、これに伴って第2のロボットアームが第3回動軸まわりに回動する。
【先行技術文献】
【特許文献】
【0004】
特開平3-239483号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような特許文献1の平行リンク式ロボットでは、下、上リンク要素の第1のリンク腕同士を連結している第1のリンク棒が第1のリンク腕と第2のリンク腕との間に配置されている。そのため、第1のリンク棒が第1のリンク腕と第2のリンク腕とを連結する結合部に接触し、平行リンク式ロボットの可動範囲が制限されるという問題がある。
【課題を解決するための手段】
【0006】
本発明のロボットは、基端部と、
前記基端部に接続され、前記基端部に対して第1回動軸まわりに回動する中央部と、
前記中央部に接続され、前記中央部に対して第2回動軸まわりに回動する先端部と、
前記基端部に収容され、前記先端部を駆動するための先端部駆動源と、
前記先端部駆動源と前記先端部とを連結するリンク機構と、を有し、
前記リンク機構は、前記第1回動軸まわりに回動する基端側クランクと、前記先端部に接続され、前記先端部と共に前記第2回動軸まわりに回動する先端側クランクと、前記基端側クランクと前記先端側クランクとを連結する第1リンクおよび第2リンクと、を有し、
前記基端側クランクは、前記先端部駆動源と接続されている基端側第1クランクアームと、前記基端側第1クランクアームと並んで配置されている基端側第2クランクアームと、前記基端側第1クランクアームと前記基端側第2クランクアームとを前記第1回動軸からずれた位置で連結している基端側クランクピンと、を有し、
前記先端側クランクは、前記先端部と接続されている先端側第1クランクアームと、前記先端側第1クランクアームと並んで配置されている先端側第2クランクアームと、前記先端側第1クランクアームと前記先端側第2クランクアームとを前記第2回動軸からずれた位置で連結している先端側クランクピンと、を有し、
前記第1リンクは、前記基端側第2クランクアームおよび前記先端側第2クランクアームに対して前記基端側第1クランクアームおよび前記先端側第1クランクアームと反対側に位置し、前記基端側第2クランクアームおよび前記先端側第2クランクアームに連結され、
前記第2リンクは、前記基端側第1クランクアームおよび前記先端側第1クランクアームと前記基端側第2クランクアームおよび前記先端側第2クランクアームとの間に位置し、前記基端側クランクピンおよび前記先端側クランクピンに連結されている。
【図面の簡単な説明】
【0007】
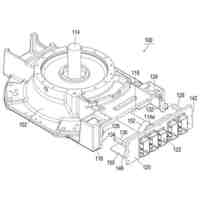
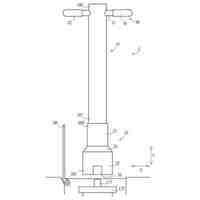
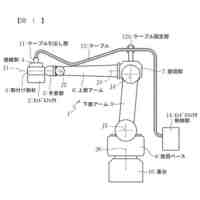
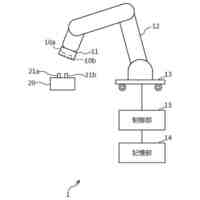
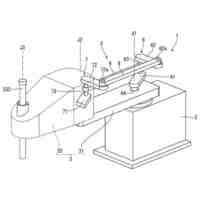
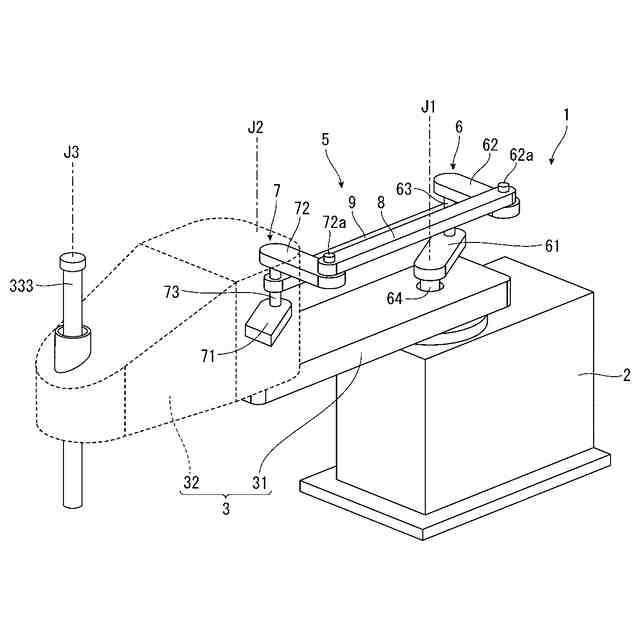
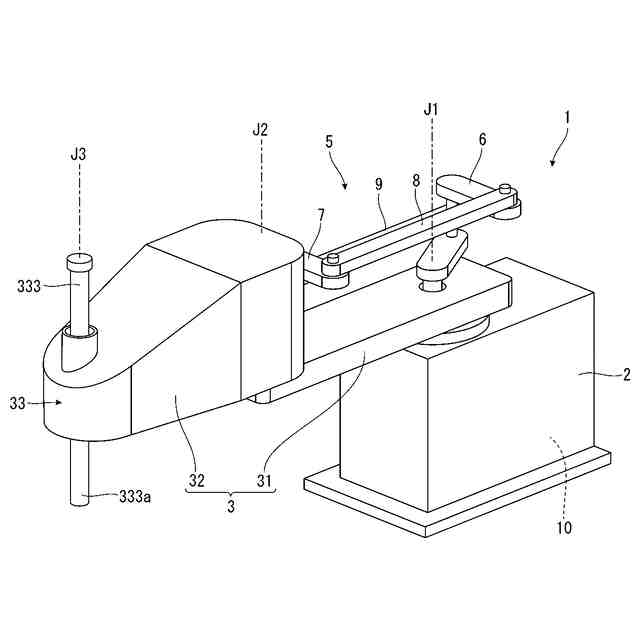
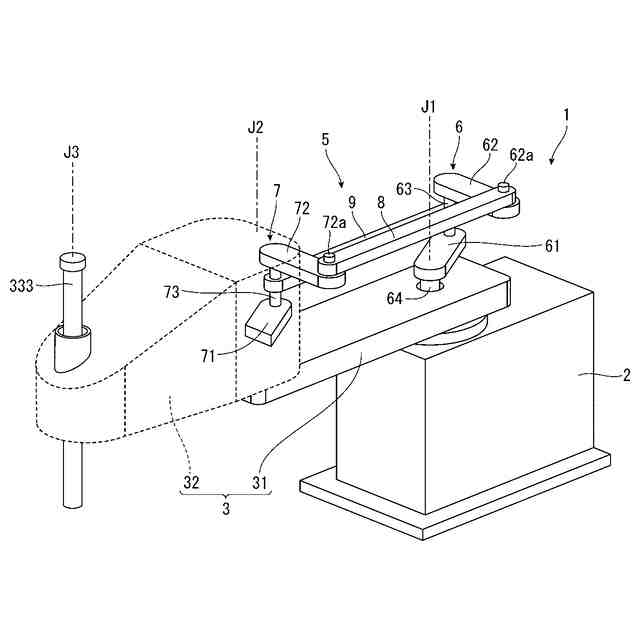
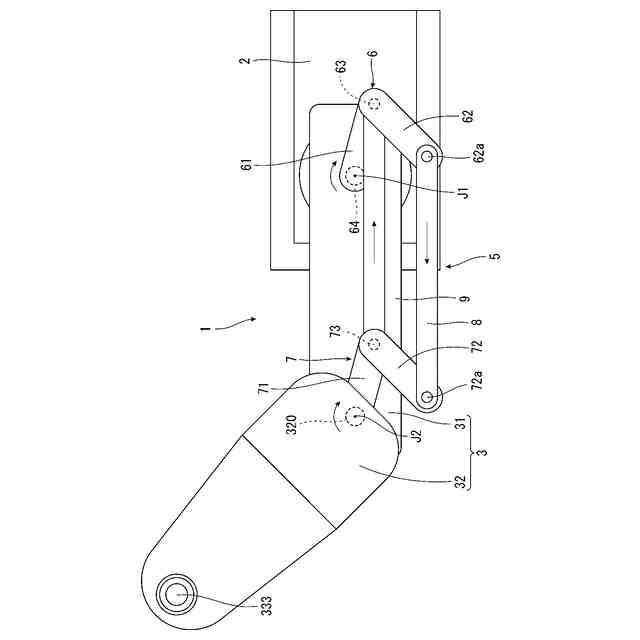
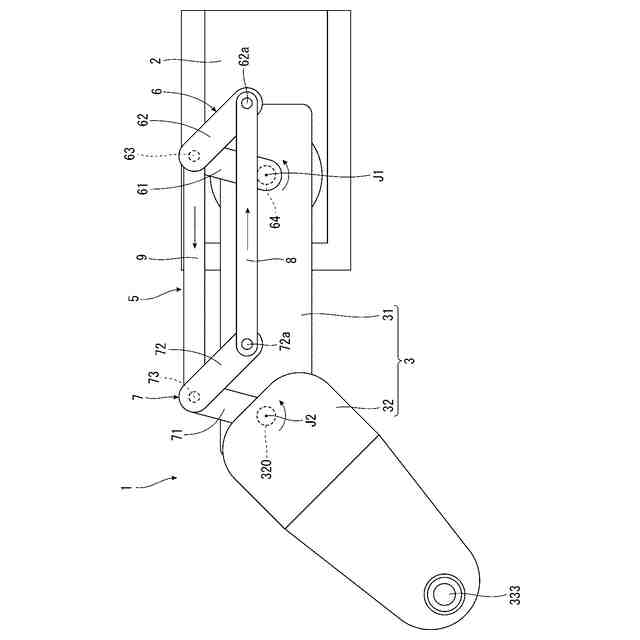
第1実施形態に係るロボットを示す斜視図である。
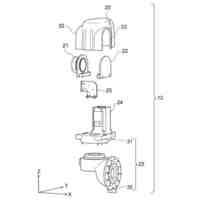
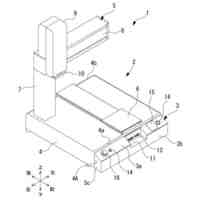
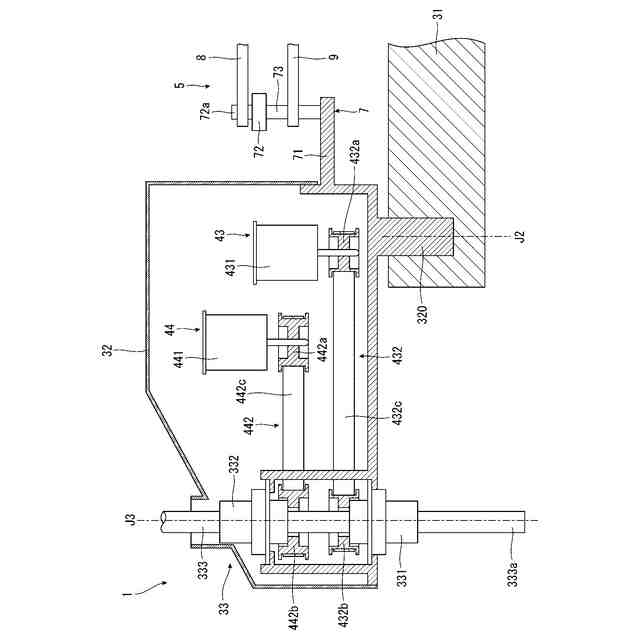
第2アームの内部を示す断面図である。
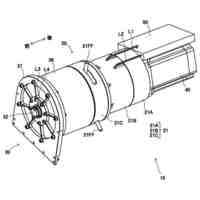
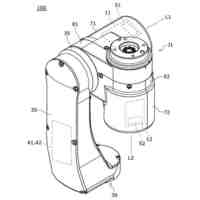
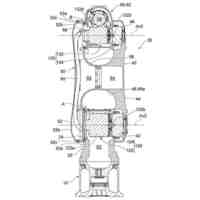
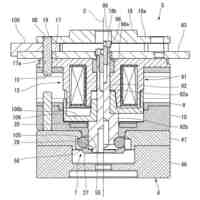
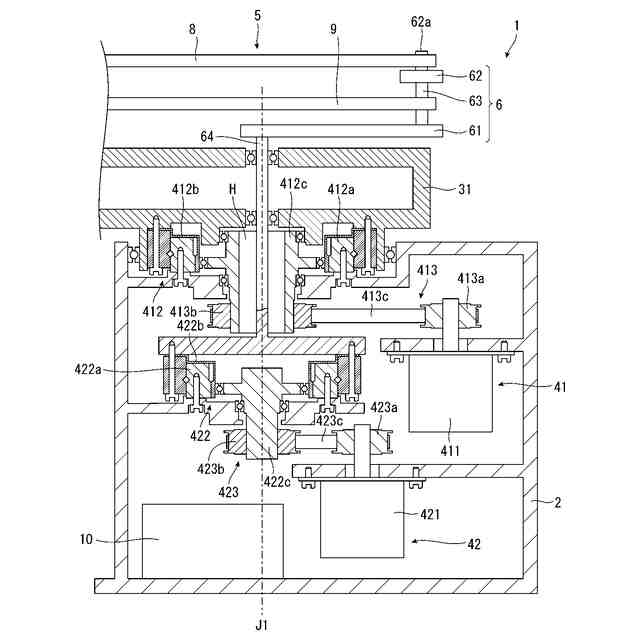
基端部の内部を示す断面図である。
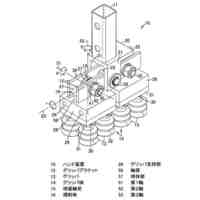
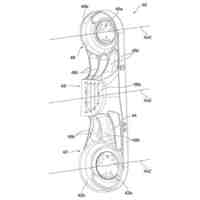
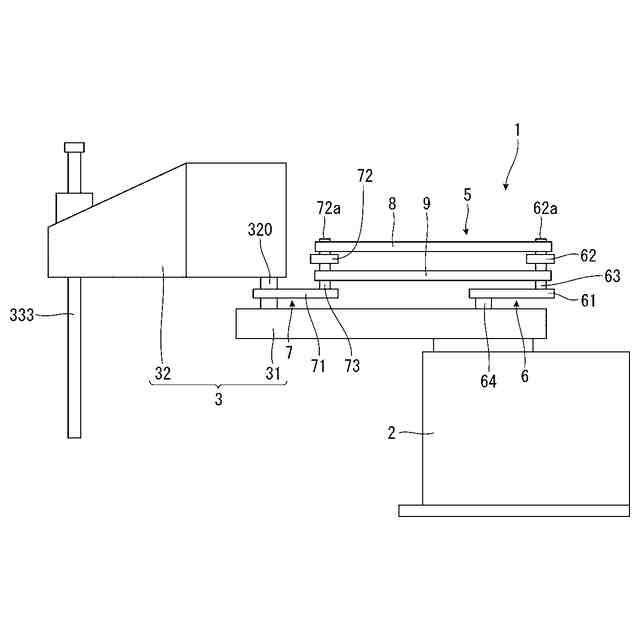
リンク機構を示す斜視図である。
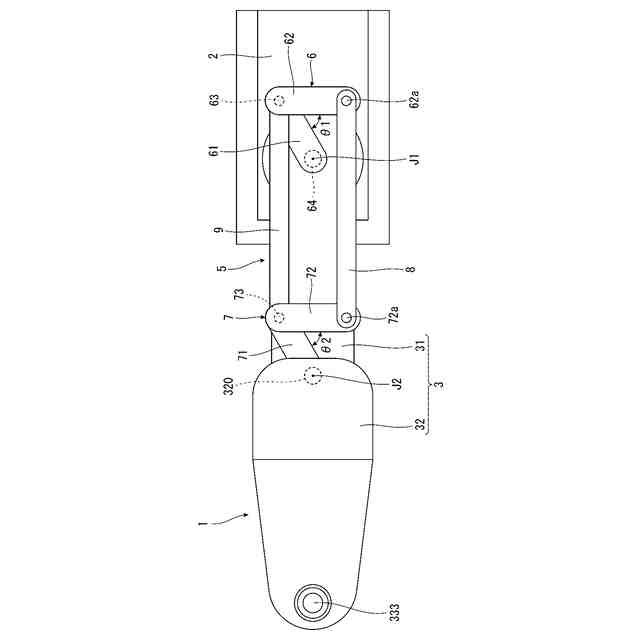
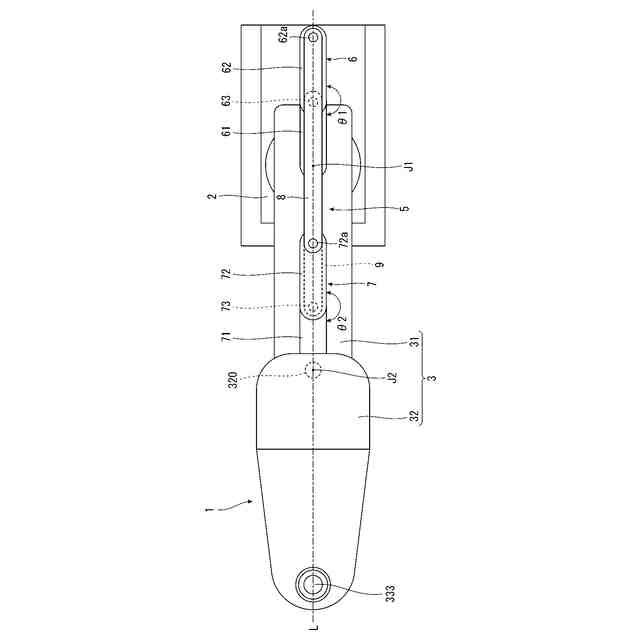
リンク機構を示す平面図である。
ロボットの動作を示す平面図である。
ロボットの動作を示す平面図である。
クランク角を180°としたときのロボットを示す平面図である。
第2実施形態に係るロボットを示す側面図である。
第3実施形態に係るロボットを示す側面図である。
第4実施形態に係るロボットを示す断面図である。
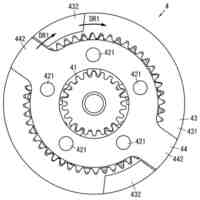
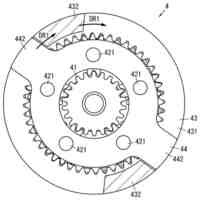
減速機の平面図である。
第5実施形態に係るロボットを示す平面図である。
第1リンクを示す断面図である。
第1リンクを伸ばした様子を示す断面図である。
第1リンクを縮めた様子を示す断面図である。
第6実施形態に係るロボットが備える第1リンクを示す断面図である。
第1リンクを伸ばした様子を示す断面図である。
第1リンクを縮めた様子を示す断面図である。
第7実施形態に係るロボットが備える第1リンクを示す平面図である。
第1リンクを伸ばした様子を示す平面図である。
第1リンクを縮めた様子を示す平面図である。
第8実施形態に係るロボットの側面図である。
ロボットが備える基端側クランクを示す断面図である。
第9実施形態に係るロボットが備える基端側クランクを示す側面図である。
第10実施形態に係るロボットを示す側面図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
図1は、第1実施形態に係るロボットを示す斜視図である。図2は、第2アームの内部を示す断面図である。図3は、基端部の内部を示す断面図である。図4は、リンク機構を示す斜視図である。図5は、リンク機構を示す平面図である。図6および図7は、それぞれ、ロボットの動作を示す平面図である。図8は、クランク角を180°としたときのロボットを示す平面図である。
【0010】
なお、図1中の上下方向は、鉛直方向と一致しており、図1中の上側を「上」、下側を「下」とも言う。また、本明細書において「鉛直」とは、鉛直と一致している場合のみならず、本発明の効果を発揮し得る限りの範囲において鉛直に対して傾斜している場合も含む意味である。本明細書において「平行」とは、2つの対象が平行と一致している場合のみならず、本発明の効果を発揮し得る限りの範囲において平行から傾斜している場合も含む意味である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
22日前
株式会社不二越
ロボット
1か月前
株式会社ダイヘン
移動体
25日前
トヨタ自動車株式会社
関節機構
27日前
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
13日前
株式会社スター精機
吸着パッド
21日前
株式会社スター精機
吸着パッド
21日前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
13日前
学校法人五島育英会
アーム機構
27日前
庄内機械株式会社
釘打装置
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
オークラ輸送機株式会社
ハンド装置
6日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
19日前
株式会社マキタ
電動作業機
28日前
川崎重工業株式会社
ロボットシステム
7日前
株式会社リコー
多関節ロボット
26日前
株式会社マキタ
電動作業機
28日前
芝浦機械株式会社
双腕ロボット
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
株式会社ダイヘン
ロボット制御システム
25日前
株式会社ジャノメ
ロボット
15日前
パナソニック株式会社
工具
1か月前
小倉クラッチ株式会社
ロボット用ツール交換装置
21日前
パナソニック株式会社
工具
1か月前
セイコーエプソン株式会社
ロボット
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ