TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117916
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024012898
出願日
2024-01-31
発明の名称
計測システム及び計測プログラム
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G06T
7/50 20170101AFI20250805BHJP(計算;計数)
要約
【課題】簡易な構成で短時間にかつ詳細な3次元形状の評価を行うことができる計測システム及び計測プログラムを提供する。
【解決手段】計測システムは、領域分割部と、復元部と、演算部とを備える。領域分割部は、複数の計測対象を画像内に含むカラー画像及び深度画像のうちの少なくともカラー画像をそれぞれの計測対象の領域に分割することでそれぞれの分割された領域の位置情報を得る。復元部は、深度画像から点群データを生成し、生成した点群データをそれぞれの分割された領域の位置情報に基づいてそれぞれの計測対象の点群データである第1の点群データに分割し、それぞれの第1の点群データからそれぞれの計測対象の3次元形状を復元する。演算部は、それぞれの計測対象の3次元形状に基づき、それぞれの計測対象の3次元形状を評価するためのパラメータを演算する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の計測対象を画像内に含むカラー画像及び深度画像のうちの少なくとも前記カラー画像をそれぞれの計測対象の領域に分割することでそれぞれの分割された領域の位置情報を得る領域分割部と、
前記深度画像から点群データを生成し、生成した点群データを前記それぞれの分割された領域の位置情報に基づいてそれぞれの計測対象の点群データである第1の点群データに分割し、それぞれの前記第1の点群データからそれぞれの計測対象の3次元形状を復元する復元部と、
前記それぞれの計測対象の3次元形状に基づき、前記それぞれの計測対象の3次元形状を評価するためのパラメータを演算する演算部と、
を具備する計測システム。
続きを表示(約 630 文字)
【請求項2】
前記領域分割部は、さらに前記深度画像をそれぞれの計測対象の領域に分割することで前記それぞれの分割された領域の位置情報を得る、
請求項1に記載の計測システム。
【請求項3】
前記計測対象の3次元形状を評価するためのパラメータに基づいて前記計測対象の3次元形状の評価結果を表示する表示制御部をさらに具備する請求項1に記載の計測システム。
【請求項4】
前記計測対象の3次元形状の評価結果は、それぞれの計測対象の3軸径、表面積、体積及び球形度の分布を表すヒストグラムを含む、
請求項3に記載の計測システム。
【請求項5】
複数の計測対象を画像内に含むカラー画像及び深度画像のうちの少なくとも前記カラー画像をそれぞれの計測対象の領域に分割することでそれぞれの分割された領域の位置情報を得ることと、
前記深度画像から点群データを生成することと、
生成した点群データを前記それぞれの分割された領域の位置情報に基づいてそれぞれの計測対象の点群データである第1の点群データに分割することと、
それぞれの前記第1の点群データからそれぞれの計測対象の3次元形状を復元することと、
前記それぞれの計測対象の3次元形状に基づき、前記それぞれの計測対象の3次元形状を評価するためのパラメータを演算することと、
をプロセッサに実行させるための計測プログラム。
発明の詳細な説明
【技術分野】
【0001】
実施形態は、計測システム及び計測プログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
岩石等の不定形、大量、かつランダムに配置された計測対象の形状及び分布を高速にかつ詳細に計測できることが求められている。岩石の場合には、ふるい分け試験といった計測手法が知られている。この他、岩石の場合には、ベルトコンベアと画像センサを組み合わせる計測手法も知られている。これらの計測手法では、一度に大量の計測対象の計測が行われ得る反面、大規模な設備が必要である。また、高精度な形状の計測手法として、個々の計測対象を1つずつ取り出してその3次元形状を計測手法もある。しかしながら、個々の計測対象を1つずつ取り出す計測手法では、詳細な計測が可能となる反面、計測時間は長くなり易い。
【先行技術文献】
【特許文献】
【0003】
特許第6672823号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
実施形態は、簡易な構成で短時間にかつ詳細な3次元形状の評価を行うことができる計測システム及び計測プログラムを提供する。
【課題を解決するための手段】
【0005】
一態様の計測システムは、領域分割部と、復元部と、演算部とを備える。領域分割部は、複数の計測対象を画像内に含むカラー画像及び深度画像のうちの少なくともカラー画像をそれぞれの計測対象の領域に分割することでそれぞれの分割された領域の位置情報を得る。復元部は、深度画像から点群データを生成し、生成した点群データをそれぞれの分割された領域の位置情報に基づいてそれぞれの計測対象の点群データである第1の点群データに分割し、それぞれの第1の点群データからそれぞれの計測対象の3次元形状を復元する。演算部は、それぞれの計測対象の3次元形状に基づき、それぞれの計測対象の3次元形状を評価するためのパラメータを演算する。
【図面の簡単な説明】
【0006】
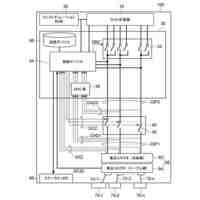
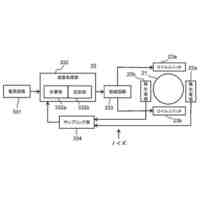
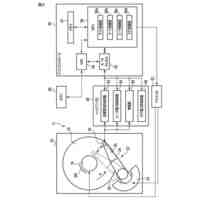
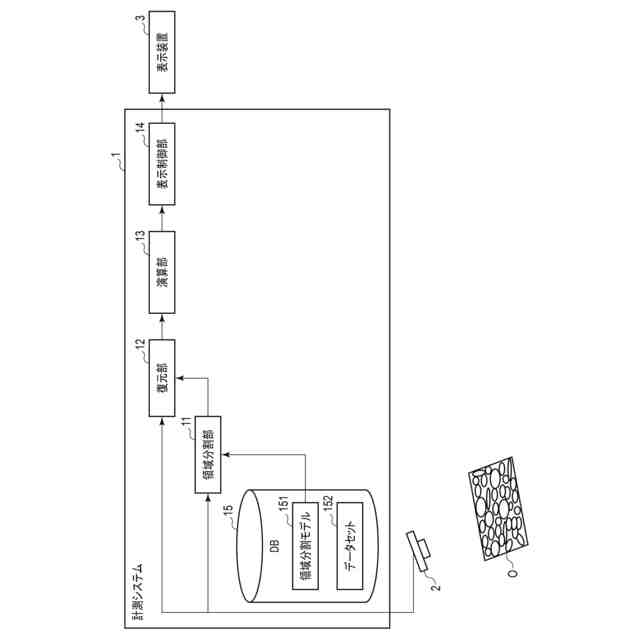
図1は、実施形態に係る計測システムの一例の構成を示すブロック図である。
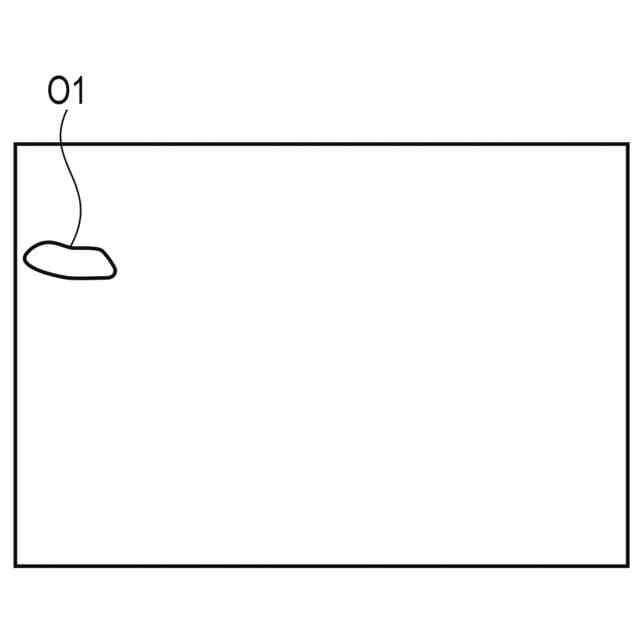
図2Aは、領域分割モデルから出力されるマスクの例を示す図である。
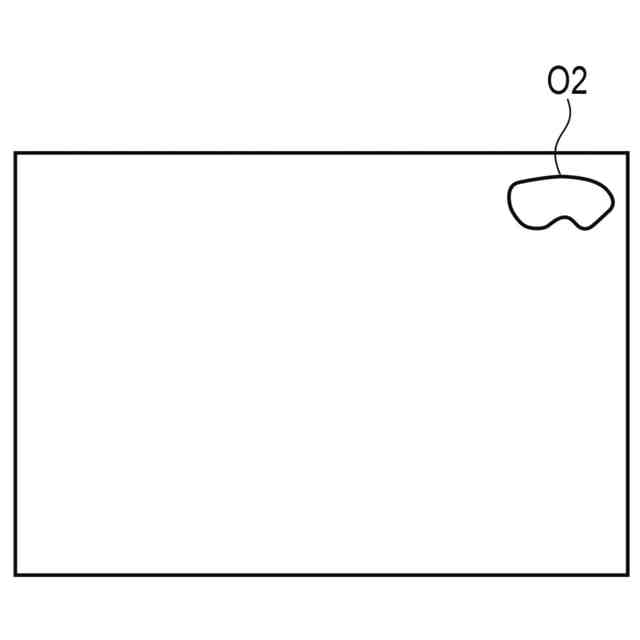
図2Bは、領域分割モデルから出力されるマスクの例を示す図である。
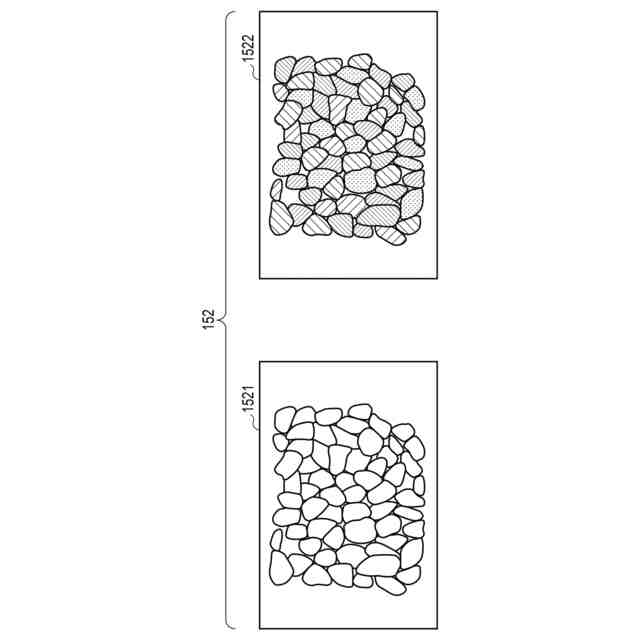
図3は、データセットの一例を示す図である。
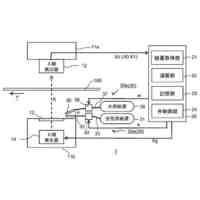
図4は、計測システムのハードウェア構成の一例を示す図である。
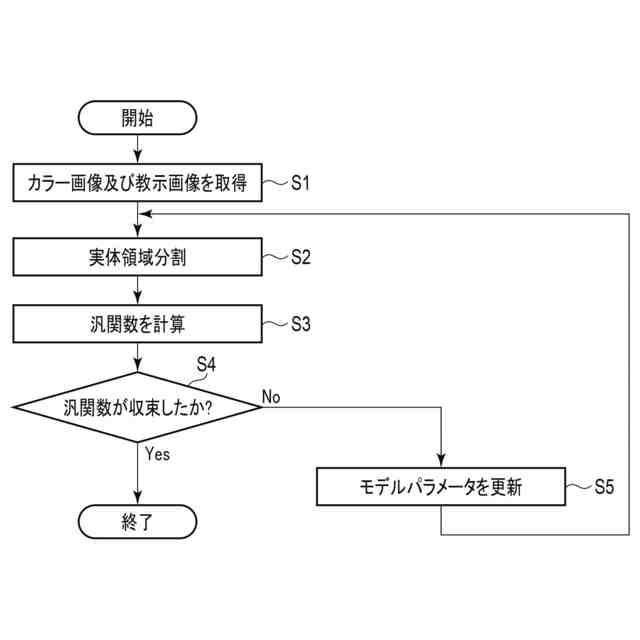
図5は、領域分割モデルの学習動作を示すフローチャートである。
図6は、学習済みの領域分割モデルを用いた計測システムの計測処理について示すフローチャートである。
図7Aは、i番目の計測対象についての点群データの例を示す図である。
図7Bは、復元処理の第1の例を示す図である。
図7Cは、復元処理の第2の例を示す図である。
図8は、表示装置へのサマリ表示の例を示す図である。
図9は、評価処理について示すフローチャートである。
図10は、表示装置への評価結果の表示の例を示す図である。
【発明を実施するための形態】
【0007】
以下、図面を参照して実施形態を説明する。図1は、実施形態に係る計測システムの一例の構成を示すブロック図である。図1に示すように、計測システム1は、領域分割部11と、復元部12と、演算部13と、表示制御部14とを有している。計測システム1は、カメラ2と通信できるように構成されている。計測システム1とカメラ2との通信は、無線で行われてもよいし、有線で行われてもよい。また、計測システム1は、表示装置3と通信できるように構成されている。計測システム1と表示装置3との通信は、無線で行われてもよいし、有線で行われてもよい。
【0008】
カメラ2は、計測対象Oの3次元形状に関わる情報を計測するように構成されたカメラである。実施形態における計測対象は、バラ積みされた多数の岩石等の不定形、大量かつランダムに配置される物体である。以下では、計測対象は岩石であるとして説明が続けられる。カメラ2は、例えばRGB-Dカメラである。RGB-Dカメラは、RGB-D画像を計測できるように構成されたカメラである。RGB-D画像は、深度画像(Depth image)とカラー画像(RGB color image)を含む。深度画像は、計測対象の各点の深度を画素の値として有する画像である。カラー画像は、計測対象の各点のRGB値を画素の値として有する画像である。実施形態では、カメラ2は、その画角内に複数の計測対象Oを収めるように計測を実施する。したがって、カメラ2によって計測されるカラー画像及び深度画像も複数の計測対象Oを含むカラー画像及び深度画像である。カメラ2は、計測対象Oの3次元形状に関わる情報を計測できればRGB-Dカメラでなくてもよい。例えば、カメラ2は、ステレオカメラ等であってもよい。
【0009】
表示装置3は、液晶ディスプレイ及び有機ELディスプレイといった表示装置である。表示装置3は、計測システム1から転送されたデータに基づいて各種の画像を表示する。例えば、表示装置3は、計測対象の3次元形状の解析情報を表示する。
【0010】
領域分割部11は、カメラ2からカラー画像と深度画像を取得し、取得したカラー画像を実体領域に分割し、それぞれの実体領域の位置情報を出力する。領域分割部11は、データベース(DB)15に記憶されている領域分割モデル151を用いてカラー画像を実体領域に分割する。実体領域は、入力されたカラー画像に写っているそれぞれの計測対象の領域である。領域分割モデル151は、SOLO(Segmenting Objects by Locations)、Mask R-CNN(Region-based Convolutional Neural Network)等の深層学習を利用したマスク推論モデルであり得る。マスク推論モデルは、入力されたカラー画像におけるそれぞれの実体領域の位置情報を表すマスクを推論するように構成されたモデルである。1つの実体領域についてのマスクは、入力されたカラー画像に写っている1つの計測対象の領域を白領域とし、残りの領域を黒領域とするマスクである。図2A及び図2Bは、領域分割モデル151から出力されるマスクの例を示している。図2Aは、あるカラー画像に写っている計測対象O1だけを白領域として残すマスクである。図2Bは、同じカラー画像に写っている計測対象O1とは異なる計測対象O2だけを白領域として残すマスクである。領域分割モデル151は、このようなマスクを入力されたカラー画像の実体領域の分だけ出力し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
2か月前
株式会社東芝
センサ
9日前
株式会社東芝
判定装置
1か月前
株式会社東芝
燃料電池
21日前
株式会社東芝
回路素子
8日前
株式会社東芝
回転電機
1か月前
株式会社東芝
配線治具
1か月前
株式会社東芝
搬送装置
1か月前
株式会社東芝
立て看板
2か月前
株式会社東芝
電子機器
1か月前
株式会社東芝
遮断装置
1か月前
株式会社東芝
制御装置
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
電磁流量計
1か月前
株式会社東芝
X線厚み計
14日前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
21日前
株式会社東芝
主幹制御器
29日前
株式会社東芝
半導体装置
2か月前
株式会社東芝
真空バルブ
3か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
アンテナ装置
13日前
株式会社東芝
静止誘導電器
3か月前
株式会社東芝
スイッチギヤ
3か月前
株式会社東芝
ディスク装置
2か月前
株式会社東芝
車両システム
3か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
スイッチギヤ
2か月前
株式会社東芝
アンテナ装置
1か月前
株式会社東芝
操作盤カバー
1か月前
株式会社東芝
計測システム
1日前
株式会社東芝
電力変換装置
6日前
株式会社東芝
異常検出装置
今日
株式会社東芝
アイソレータ
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ