TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123026
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018845
出願日
2024-02-09
発明の名称
制御装置、制御方法
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H04N
23/695 20230101AFI20250815BHJP(電気通信技術)
要約
【課題】 撮影画像から追尾対象が検出できなくなった場合に、撮影方向の急激な変化の発生を軽減させるための技術を提供すること。
【解決手段】 撮影画像から追尾対象を検出できた場合には、該検出の結果に基づいて、該追尾対象への方向を追尾被写体方向として算出し、撮影画像から追尾対象を検出できなかった場合には、過去に算出した追尾被写体方向に基づいて、撮影方向の制御速度を制御する。
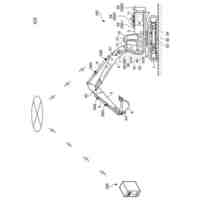
【選択図】 図1
特許請求の範囲
【請求項1】
撮影画像から追尾対象を検出できた場合には、該検出の結果に基づいて、該追尾対象への方向を追尾被写体方向として算出し、撮影画像から追尾対象を検出できなかった場合には、過去に算出した追尾被写体方向に基づいて、撮影方向の制御速度を制御する制御手段を備えることを特徴とする制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記制御手段は、
撮影画像から追尾対象を検出できた場合には、該撮影画像から検出された該追尾対象の位置と目標位置との差分と、現在の撮影方向およびズームと、に基づいて前記追尾被写体方向を算出することを特徴とする請求項1に記載の制御装置。
【請求項3】
前記制御手段は、
撮影画像から追尾対象を検出できた場合には、該撮影画像から検出された該追尾対象の位置と目標位置との差分に基づいて、撮影方向の制御速度を算出することを特徴とする請求項1に記載の制御装置。
【請求項4】
前記制御手段は、
撮影画像から追尾対象を検出できた場合には、該撮影画像から検出された該追尾対象のサイズと規定サイズとの差分に基づいて、ズームの制御速度を算出することを特徴とする請求項1に記載の制御装置。
【請求項5】
前記制御手段は、
撮影画像から追尾対象を検出できなかった場合には、撮影方向の制御速度がゼロとなってから追尾対象が検出できない時間が所定時間だけ継続した場合に、撮影方向を変更することを特徴とする請求項1に記載の制御装置。
【請求項6】
前記制御手段は、
撮影画像から追尾対象を検出できなかった場合には、現在の撮影方向と、過去に算出した追尾被写体方向と、の差分に基づいて、撮影方向の制御速度を算出することを特徴とする請求項1に記載の制御装置。
【請求項7】
前記制御手段は、
撮影画像から追尾対象を検出できなかった場合には、現在の撮影方向と、過去に算出した追尾被写体方向に基づいて予測される追尾被写体方向と、の差分に基づいて、撮影方向の制御速度を算出することを特徴とする請求項1に記載の制御装置。
【請求項8】
前記制御手段は、
撮影画像から追尾対象を検出できなかった場合には、現在の撮影方向と、過去に算出した追尾被写体方向を該追尾対象のサイズに基づいて補正した追尾被写体方向と、の差分に基づいて、撮影方向の制御速度を算出することを特徴とする請求項1に記載の制御装置。
【請求項9】
さらに、
撮像装置により撮影された撮影画像を取得する手段と、
前記制御手段により制御された制御速度で撮影方向を変更させるためのコマンドを生成し、該生成したコマンドを前記撮像装置に対して送信する送信手段と
を備えることを特徴とする請求項1に記載の制御装置。
【請求項10】
さらに、
撮影画像を撮影する撮像手段と、
前記制御手段により制御された制御速度で撮影方向を変更させる駆動手段と
を備えることを特徴とする請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像制御技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、AI(Artificial Intelligence)の進化により、カメラにより撮影された撮影映像から被写体を検出し、該被写体を追尾するようにカメラのパン(Pan)・チルト(Tilt)を制御する自動追尾技術が提案されている。
【0003】
追尾対象の被写体(追尾被写体)の手前を別の被写体が横切ったり、追尾被写体が移動して壁などの障害物の陰に隠れてしまったりすると、一時的に追尾被写体がカメラから見えなくなってしまうケースがある。撮影映像に追尾被写体が映らなくなってしまうと、撮影映像から追尾被写体を検出することができなくなってしまう。
【0004】
自動追尾において、被写体が遮蔽等によって一時的に検出できなった場合にすぐさまパン・チルトの制御を停止してしまうと、カメラのパン方向の移動やチルト方向の移動が急停止してしまうため、撮影映像の品位が悪くなってしまう。
【0005】
特許文献1には、追跡目標が遮蔽物に遮蔽された場合に、遮蔽物を新たな追跡対象として設定する技術などが開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2012-80221号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、人と人とのすれ違いなどのように、追尾被写体が、該追尾被写体の進行方向とは逆方向に移動する別の人物によって遮蔽されるような場合、手前側の人物を新たな追尾対象としてしまうと、追尾対象の移動方向が急反転してしまうことになる。この結果、パン・チルト制御に急激な変化が生じてしまい、撮影映像の追尾品位が悪くなってしまう恐れがある。本発明では、撮影画像から追尾対象が検出できなくなった場合に、撮影方向の急激な変化の発生を軽減させるための技術を提供する。
【課題を解決するための手段】
【0008】
本発明の一様態は、撮影画像から追尾対象を検出できた場合には、該検出の結果に基づいて、該追尾対象への方向を追尾被写体方向として算出し、撮影画像から追尾対象を検出できなかった場合には、過去に算出した追尾被写体方向に基づいて、撮影方向の制御速度を制御する制御手段を備えることを特徴とする。
【発明の効果】
【0009】
本発明によれば、撮影画像から追尾対象が検出できなくなった場合に、撮影方向の急激な変化の発生を軽減させることができる。
【図面の簡単な説明】
【0010】
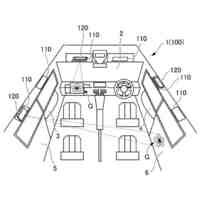
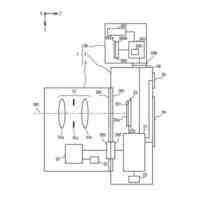
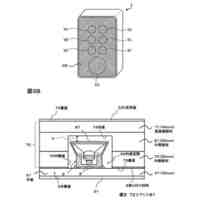
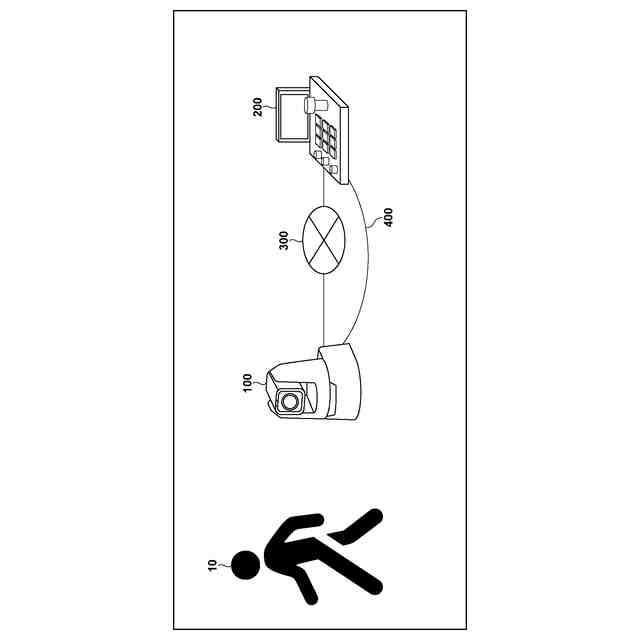
システムの構成例を示す図。
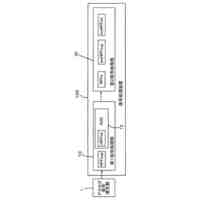
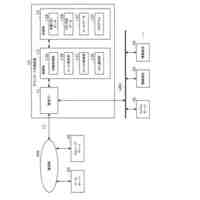
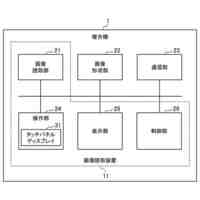
カメラ100およびワークステーション200のそれぞれのハードウェア構成例を示すブロック図。
カメラ100が追尾被写体を追尾撮影するために行う処理のフローチャート。
ワークステーション200がカメラ100に追尾被写体の追尾撮影を行わせるために行う処理のフローチャート。
ステップS404における表示例を示す図。
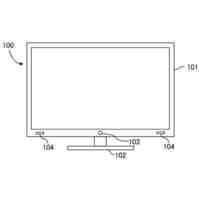
被写体追尾中における表示部208の表示画面の一例を示す図。
(a)は、WdiffとVpとの関係を表すグラフ、(b)は、「カメラ100から見た追尾被写体のパン方向の角度とカメラ100の現在のパン角との角度差」と「パン制御速度」との関係を表すグラフ。
(a)は、カメラ100による撮影画像800を示す図、(b)は、カメラ100から撮影画像に映る被写体までの距離を半径とした球面801を示す図、(c)は、追尾被写体の三次元座標(X,Y,Z)およびパン角PANtargetとチルト角TILTtargetを示す図。
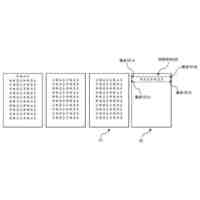
推論部206の被写体検出特性の一例を説明するための図。
カメラ1000のハードウェア構成例を示すブロック図。
カメラ1000による追尾被写体の追尾撮影のフローチャート。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
店内配信予約システム
1か月前
サクサ株式会社
中継装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン電子株式会社
モバイル装置
1か月前
電気興業株式会社
無線中継器
2か月前
株式会社リコー
画像形成装置
15日前
日本精機株式会社
画像投映システム
1か月前
ヤマハ株式会社
信号処理装置
1か月前
キヤノン株式会社
画像処理装置
2か月前
キヤノン株式会社
通信システム
2か月前
ブラザー工業株式会社
読取装置
10日前
キヤノン株式会社
画像表示装置
2か月前
リオン株式会社
電気機械変換器
2か月前
株式会社ニコン
撮像装置
25日前
エルメック株式会社
信号伝送回路
2か月前
DXO株式会社
情報処理システム
22日前
シャープ株式会社
表示装置
2か月前
キヤノン電子株式会社
画像読取システム
2か月前
パテントフレア株式会社
水中電波通信法
19日前
株式会社クーネル
音響装置
2か月前
キヤノン電子株式会社
シート材搬送装置
11日前
個人
外部ヘッダ変換通信装置および通信網
1か月前
日本無線株式会社
無線通信システム
4日前
株式会社リコー
画像形成装置
2日前
日本無線株式会社
無線通信システム
2日前
株式会社オーディオテクニカ
受光器
1か月前
テックス通信株式会社
電話システム
1か月前
キヤノン株式会社
移動体
2か月前
シャープ株式会社
画像形成装置
11日前
八重洲無線株式会社
無線中継システム
1か月前
サクサ株式会社
ダウンロード支援装置
11日前
アルプスアルパイン株式会社
音響装置
2か月前
住友建機株式会社
表示システム
1か月前
シャープ株式会社
画像読取装置
2か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ