TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123269
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025096722,2024024497
出願日
2025-06-10,2018-03-30
発明の名称
判定装置
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/26 20060101AFI20250815BHJP(測定;試験)
要約
【課題】地物の実際の位置が地図データにおける位置と一致しないことを検出し、必要に応じて地図データを修正する。
【解決手段】判定装置は、計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される、前記移動体から対象物までの距離を示す第2距離情報を取得する。また、判定装置は、移動体の自己位置精度情報を取得する。そして、第1距離情報及び第2距離情報が示す位置の差分値、並びに、自己位置精度情報に基づき、対象物の地図情報における位置と前記対象物の現実環境における位置との間の所定値以上のずれの有無を判定する。
【選択図】図7
特許請求の範囲
【請求項1】
計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される前記移動体の位置から地図情報における前記対象物の位置までの距離を示す第2距離情報を取得する第1取得部と、
前記計測部による前記対象物の位置の計測精度を示す計測精度情報、及び、前記推定部による前記移動体の位置の推定精度を示す推定精度情報を取得する第2取得部と、
前記第1距離情報及び前記第2距離情報が示す距離の差分値、前記計測精度情報、並びに、前記推定精度情報に基づき、前記対象物の地図情報における位置と前記対象物の現実環境における位置との間の所定値以上のずれの有無を判定する判定部と、
を備えることを特徴とする判定装置。
続きを表示(約 1,800 文字)
【請求項2】
前記所定値以上のずれを有すると判定された対象物について、前記差分値、前記推定精度情報及び前記計測精度情報を含む誤差情報を、前記判定部から取得する第3取得部と、
前記第3取得部が同一の対象物について所定数以上の誤差情報を取得した場合、取得した誤差情報に含まれる差分値の統計処理により、前記地図情報における前記対象物の位置の修正量を示す修正用差分値を決定し、前記修正用差分値を用いて前記対象物の前記地図情報における位置を修正する修正部と、
を備えることを特徴とする請求項1に記載の判定装置。
【請求項3】
前記第1距離情報及び前記第2距離情報は、前記移動体を基準とする移動体座標系におけるベクトルであり、前記差分値は、前記移動体座標系における差分値ベクトルであり、
前記修正部は、前記差分値ベクトルを移動体座標から地図座標系に変換して前記統計処理を行うことを特徴とする請求項2に記載の判定装置。
【請求項4】
前記修正部は、前記第3取得部が同一の対象物について所定数以上の車両から誤差情報を取得した場合において、取得した誤差情報に含まれる差分値のばらつきが所定値以上である場合には、前記地図情報中の前記対象物に対して付与される位置精度情報のレベルを低下させることを特徴とする請求項2に記載の判定装置。
【請求項5】
前記判定装置は、車両に搭載されており、
前記所定値以上のずれがあると前記判定部が判定した場合、前記対象物の識別情報、前記差分値、前記推定精度情報及び前記計測精度情報を含む誤差情報を外部のサーバへ送信する送信部を備えることを特徴とする請求項1に記載の判定装置。
【請求項6】
前記送信部は、同一の対象物について前記誤差情報を複数取得した場合において、前記複数の誤差情報に基づく分散値が所定値以下の場合には、前記複数の誤差情報または当該複数の誤差情報を用いて求められる情報を前記外部のサーバへ送信することを特徴とする請求項5に記載の判定装置。
【請求項7】
前記誤差情報は、日時情報を含むことを特徴とする請求項2又は5に記載の判定装置。
【請求項8】
前記計測部及び前記推定部は車両に搭載されており、
前記判定装置は、サーバに設置されており、
前記第1取得部は、前記第1距離情報及び前記第2距離情報を前記車両から取得することを特徴とする請求項1に記載の判定装置。
【請求項9】
判定装置によって実行される判定方法であって、
計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される前記移動体の位置から地図情報における前記対象物の位置までの距離を示す第2距離情報を取得する第1取得工程と、
前記計測部による前記対象物の位置の計測精度を示す計測精度情報、及び、前記推定部による前記移動体の位置の推定精度を示す推定精度情報を取得する第2取得工程と、
前記第1距離情報及び前記第2距離情報が示す距離の差分値、前記計測精度情報、並びに、前記推定精度情報に基づき、前記対象物の地図情報における位置と前記対象物の現実環境における位置との間の所定値以上のずれの有無を判定する判定工程と、
を備えることを特徴とする判定方法。
【請求項10】
コンピュータを備える判定装置により実行されるプログラムであって、
計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される前記移動体の位置から地図情報における前記対象物の位置までの距離を示す第2距離情報を取得する第1取得部、
前記計測部による前記対象物の位置の計測精度を示す計測精度情報、及び、前記推定部による前記移動体の位置の推定精度を示す推定精度情報を取得する第2取得部、
前記第1距離情報及び前記第2距離情報が示す距離の差分値、前記計測精度情報、並びに、前記推定精度情報に基づき、前記対象物の地図情報における位置と前記対象物の現実環境における位置との間の所定値以上のずれの有無を判定する判定部、
として前記コンピュータを機能させることを特徴とするプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、地図データにおける地物の位置を修正する技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
車両に搭載される外界センサにより検出される周辺情報に基づいて、地図データを更新する手法が提案されている。例えば、特許文献1は、センサ部の出力に基づく周辺情報と部分地図DBとを比較することで変化点候補データを生成し、当該変化点候補データの取得時のセンサの精度を考慮して地図データの更新を行う手法を記載している。
【先行技術文献】
【特許文献】
【0003】
特開2016-156973号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
サーバに記憶された地図データは地物の位置座標を含むが、地物の位置座標の測定後に何らかの原因で地物の位置座標が変化すると、地図データに含まれる地物の位置座標と実際の地物の位置座標とが一致しなくなる。例えば、車両の衝突などによって標識の位置がずれたり、地上の設置物が移動したりした場合には、実際の地物の位置が地図データ中の位置と一致しなくなる。このような状態で、地図データ中の地物の位置座標を利用して車両の自車位置を推定すると推定誤差が大きくなり、運転支援や自動運転に支障をきたす恐れがある。
【0005】
本発明が解決しようとする課題として上記のものが例として挙げられる。本発明は、地物の実際の位置が地図データにおける位置と一致しないことを検出し、必要に応じて地図データを修正することを目的とする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、判定装置であって、計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される前記移動体の位置から地図情報における前記対象物の位置までの距離を示す第2距離情報を取得する第1取得部と、前記計測部による前記対象物の位置の計測精度を示す計測精度情報、及び、前記推定部による前記移動体の位置の推定精度を示す推定精度情報を取得する第2取得部と、前記第1距離情報及び前記第2距離情報が示す距離の差分値、前記計測精度情報、並びに、前記推定精度情報に基づき、前記対象物の地図情報における位置と前記対象物の現実環境における位置との間の所定値以上のずれの有無を判定する判定部と、を備えることを特徴とする。
【0007】
請求項に記載の発明は、判定装置によって実行される判定方法であって、計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される前記移動体の位置から地図情報における前記対象物の位置までの距離を示す第2距離情報を取得する第1取得工程と、前記計測部による前記対象物の位置の計測精度を示す計測精度情報、及び、前記推定部による前記移動体の位置の推定精度を示す推定精度情報を取得する第2取得工程と、前記第1距離情報及び前記第2距離情報が示す距離の差分値、前記計測精度情報、並びに、前記推定精度情報に基づき、前記対象物の地図情報における位置と前記対象物の現実環境における位置との間の所定値以上のずれの有無を判定する判定工程と、を備えることを特徴とする。
【0008】
請求項に記載の発明は、コンピュータを備える判定装置により実行されるプログラムであって、計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される前記移動体の位置から地図情報における前記対象物の位置までの距離を示す第2距離情報を取得する第1取得部、前記計測部による前記対象物の位置の計測精度を示す計測精度情報、及び、前記推定部による前記移動体の位置の推定精度を示す推定精度情報を取得する第2取得部、前記第1距離情報及び前記第2距離情報が示す距離の差分値、前記計測精度情報、並びに、前記推定精度情報に基づき、前記対象物の地図情報における位置と前記対象物の現実環境における位置との間の所定値以上のずれの有無を判定する判定部、として前記コンピュータを機能させることを特徴とする。
【0009】
請求項に記載の発明は、判定装置であって、計測部により計測される、移動体から対象物までの距離を示す第1距離情報、及び、推定部により推定される前記移動体の位置から地図情報における前記対象物の位置までの距離を示す第2距離情報を取得する第1取得部と、前記計測部による前記対象物の位置の計測精度を示す計測精度情報、及び、前記推定部による前記移動体の位置の推定精度を示す推定精度情報を取得する第2取得部と、前記第1距離情報及び前記第2距離情報が示す距離の差分値、前記計測精度情報、並びに、前記推定精度情報に基づき、前記対象物の地図情報における位置と前記対象物の前記第1距離に基づく位置との間の所定値以上のずれの有無を判定する判定部と、を備えることを特徴とする。
【図面の簡単な説明】
【0010】
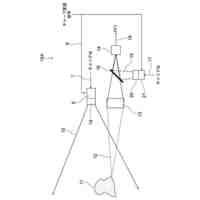
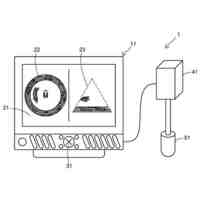
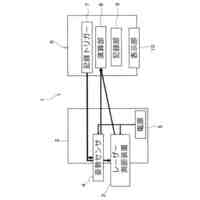
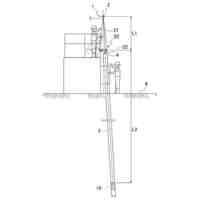
運転支援システムの概略構成図である。
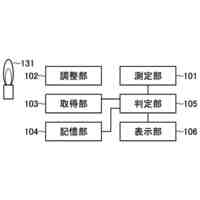
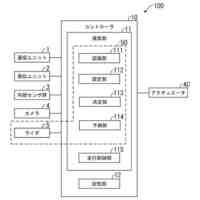
車載機の機能的構成を示すブロック図である。
サーバ装置の機能的構成を示すブロック図である。
状態変数ベクトルを2次元直交座標で表した図である。
予測ステップと計測更新ステップとの概略的な関係を示す図である。
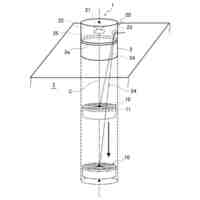
位置推定時における車両と地物の位置関係を示す。
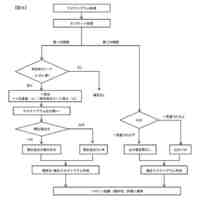
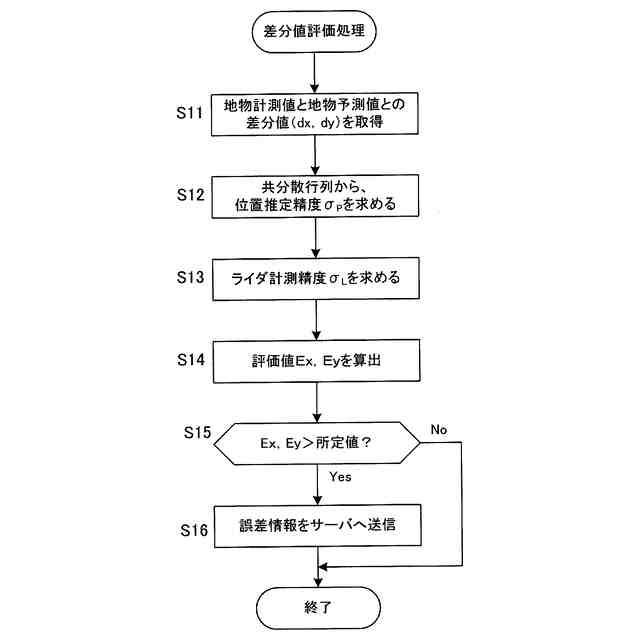
第1実施例による差分値評価処理のフローチャートである。
第1実施例による地図修正処理のフローチャートである。
状態変数ベクトルを3次元直交座標で表した図である。
予測ステップと計測更新ステップとの概略的な関係を示す図である。
位置推定時における車両と地物の位置関係を示す。
第2実施例による差分値評価処理のフローチャートである。
第2実施例による地図修正処理のフローチャートである。
実施例による効果を説明する図である。
複数の道路標識が並んで設置されている例を示す。
複合的な白線及び道路鋲のある白線の例を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
微小振動検出装置
4日前
株式会社イシダ
X線検査装置
4日前
ユニパルス株式会社
力変換器
25日前
三菱電機株式会社
計測器
19日前
株式会社辰巳菱機
システム
13日前
IPU株式会社
距離検出装置
25日前
株式会社FRPカジ
FRP装置
15日前
株式会社東芝
センサ
4日前
TDK株式会社
磁気センサ
今日
株式会社カワタ
サンプリング装置
8日前
富士レビオ株式会社
嵌合システム
18日前
日本精工株式会社
分注装置
11日前
学校法人立命館
液面レベルセンサ
12日前
TDK株式会社
ガスセンサ
7日前
株式会社精工技研
光電圧プローブ
5日前
大和製衡株式会社
組合せ計量装置
15日前
大陽日酸株式会社
液面センサ
今日
三菱マテリアル株式会社
温度センサ
11日前
富士電機株式会社
半導体パッケージ
21日前
アズビル株式会社
火炎状態判定装置
26日前
国立大学法人京都大学
バイオセンサ
今日
本多電子株式会社
超音波ソナー装置
20日前
戸田建設株式会社
測量機
11日前
東ソー株式会社
クロマトグラムの形状判定方法
21日前
株式会社ダイフク
搬送設備
4日前
トヨタ自動車株式会社
データの補正方法
20日前
三和テッキ株式会社
架線の高さ、偏位測定装置
13日前
株式会社レイマック
3次元形状計測方法
1日前
株式会社豊田自動織機
自律走行車
5日前
愛知時計電機株式会社
超音波流量計
25日前
株式会社エイアンドティー
電解質分析装置
11日前
本田技研工業株式会社
物体検出装置
11日前
株式会社村田製作所
圧力センサ装置
6日前
大豊建設株式会社
直線精度測定装置
15日前
大豊建設株式会社
鉛直精度測定装置
15日前
本田技研工業株式会社
外界認識装置
15日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ