TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025123662
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2024019257
出願日
2024-02-13
発明の名称
制御装置、プログラムおよび制御システム
出願人
株式会社デンソーテン
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
50/12 20120101AFI20250818BHJP(車両一般)
要約
【課題】刺激により覚醒した運転者の誤操作による影響を抑制することができる制御装置、プログラムおよび制御システムを提供すること。
【解決手段】実施形態の一態様に係る制御装置においては、コントローラを備える。コントローラは、車両運転中の運転者の居眠りを検知した場合に運転者に対して刺激を与えて覚醒させる。また、コントローラは、運転者に対して刺激を与えた後、運転者の運転操作に応じた車両制御を一時的に制限する。
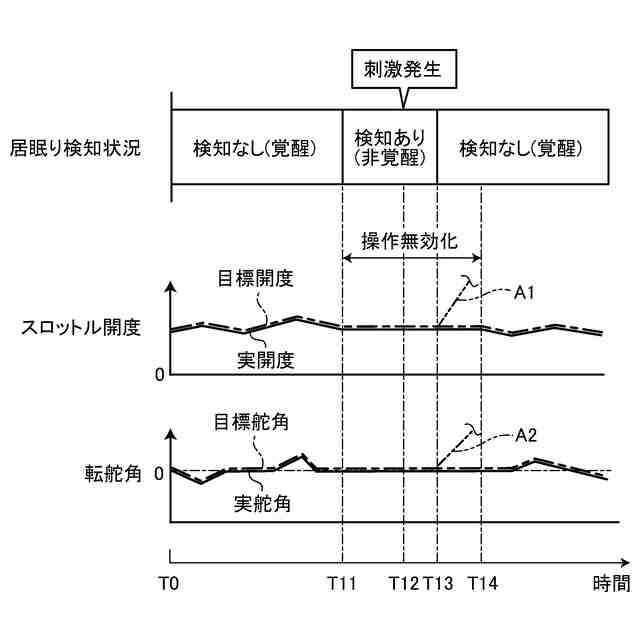
【選択図】図2
特許請求の範囲
【請求項1】
車両運転中の運転者の居眠りを検知した場合に前記運転者に対して刺激を与えて覚醒させるコントローラを備えた制御装置であって、
前記コントローラは、
前記運転者に対して刺激を与えた後、前記運転者の運転操作に応じた車両制御を一時的に制限する、
制御装置。
続きを表示(約 910 文字)
【請求項2】
前記コントローラは、
前記運転者の居眠りを検知した後、前記車両制御の制限を開始する、
請求項1に記載の制御装置。
【請求項3】
前記コントローラは、
前記運転操作を無効化することで、前記車両制御を制限する、
請求項1に記載の制御装置。
【請求項4】
前記コントローラは、
車両が直進路を走行中である場合、前記運転操作の無効化を実行する、
請求項3に記載の制御装置。
【請求項5】
前記コントローラは、
車両がカーブ路に進入した場合、または、前記車両がカーブ路を走行中である場合、前記運転操作の無効化を実行しない、
請求項3に記載の制御装置。
【請求項6】
前記コントローラは、
車両が直進路からカーブ路に進入した場合、または、前記車両がカーブ路を走行中である場合、前記運転操作を無効化する制御から、前記運転操作に応じて変化する車両の動作を制限する制御に切り替えて、前記車両制御を制限する、
請求項3に記載の制御装置。
【請求項7】
前記コントローラは、
前記運転操作に応じて変化する車両の動作を制限することで、前記車両制御を制限する、
請求項1に記載の制御装置。
【請求項8】
前記コントローラは、
前記運転操作に応じて変化する車両の動作の範囲を、予め定められた上限閾値および下限閾値の範囲にすることで、前記車両制御を制限する、
請求項7に記載の制御装置。
【請求項9】
前記コントローラは、
前記運転操作に応じて変化する車両の動作の変化量を制限することで、前記車両制御を制限する、
請求項7に記載の制御装置。
【請求項10】
前記コントローラは、
車両における自動運転制御と前記車両制御を制限する制御とが実行されている場合、前記自動運転制御を優先させる、
請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、プログラムおよび制御システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、車両運転中の運転者の居眠りを検知した場合、運転者に対して振動、音声などによる刺激を与えて覚醒させる技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-111006号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
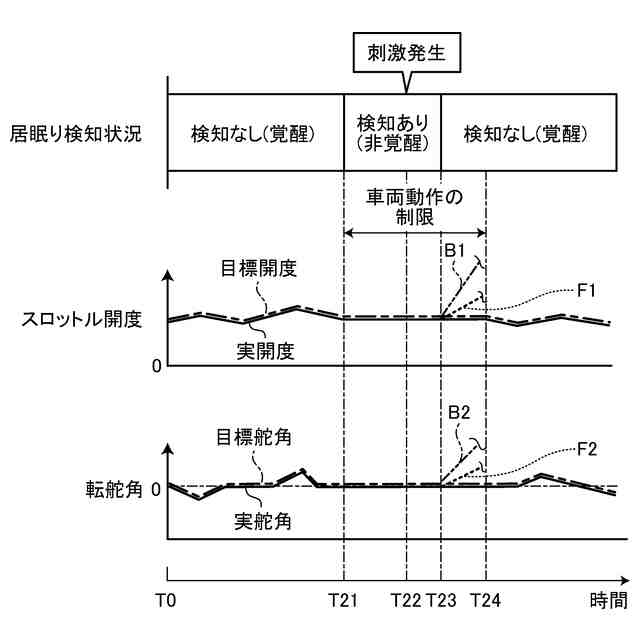
しかしながら、上記のように刺激を与えて運転者を覚醒させた際、かかる刺激によって驚いた運転者が、車両のアクセル操作、ステアリング操作などの運転操作を誤ってしまい、車両の挙動などに影響を与えるおそれがあった。
【0005】
本発明は、上記に鑑みてなされたものであって、刺激により覚醒した運転者の誤操作による影響を抑制することができる制御装置、プログラムおよび制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決し、目的を達成するために、本発明に係る制御装置は、コントローラを備える。コントローラは、車両運転中の運転者の居眠りを検知した場合に前記運転者に対して刺激を与えて覚醒させる。また、コントローラは、前記運転者に対して刺激を与えた後、前記運転者の運転操作に応じた車両制御を一時的に制限する。
【発明の効果】
【0007】
本発明によれば、運転者に対して刺激を与えた後、運転者の運転操作に応じた車両制御を一時的に制限するようにしたので、刺激によって驚いた運転者が誤操作を行った場合であっても、誤操作による車両の挙動などへの影響を抑制することができる。
【図面の簡単な説明】
【0008】
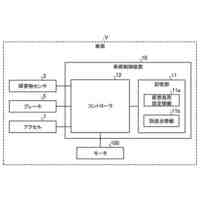
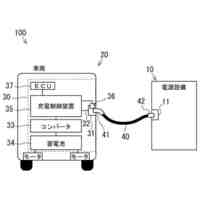
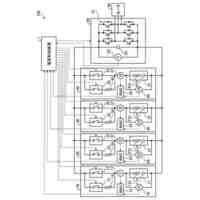
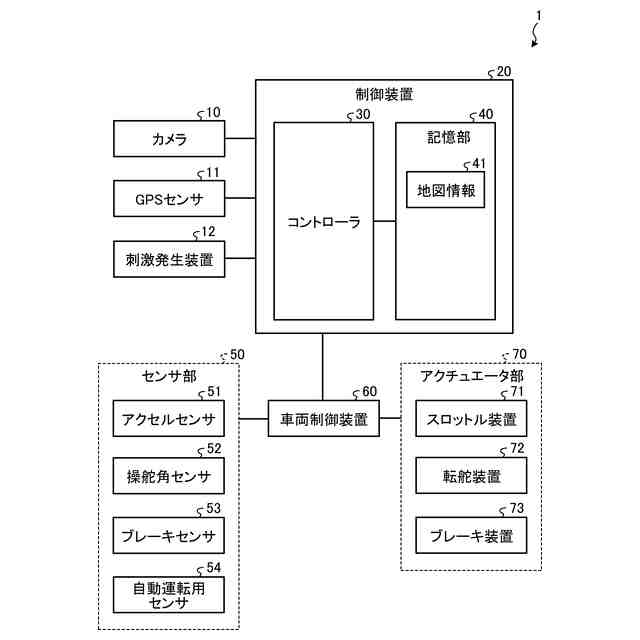
図1は、第1実施形態に係る制御システムの構成例を示すブロック図である。
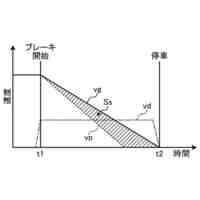
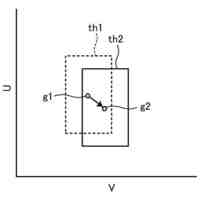
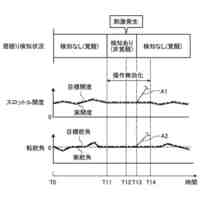
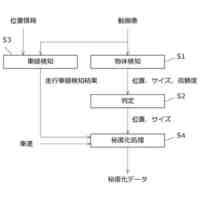
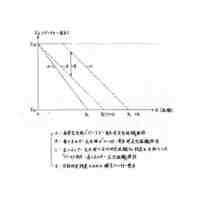
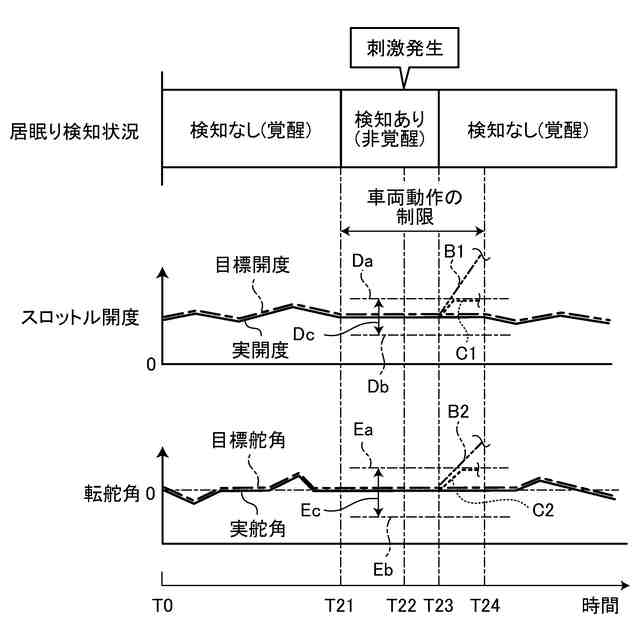
図2は、第1実施形態に係る制御装置が行う車両制御の制限を説明するための図である。
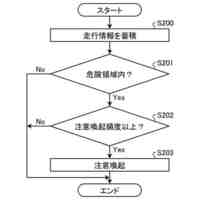
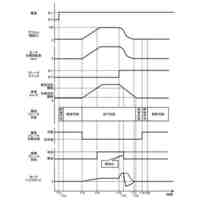
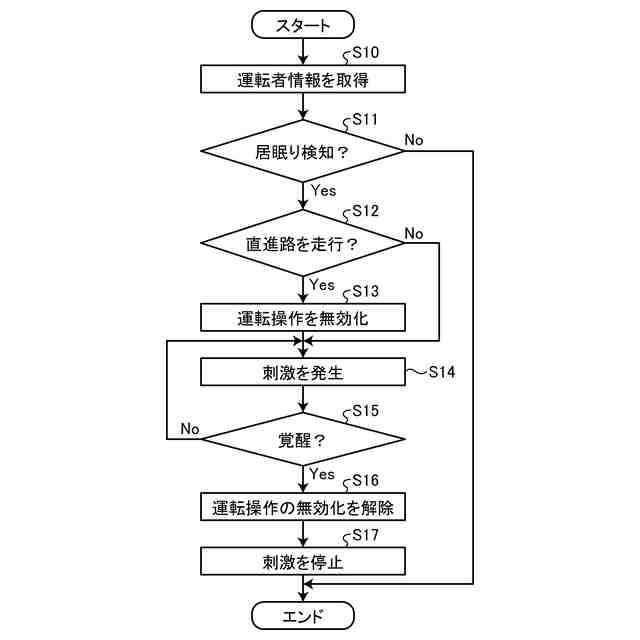
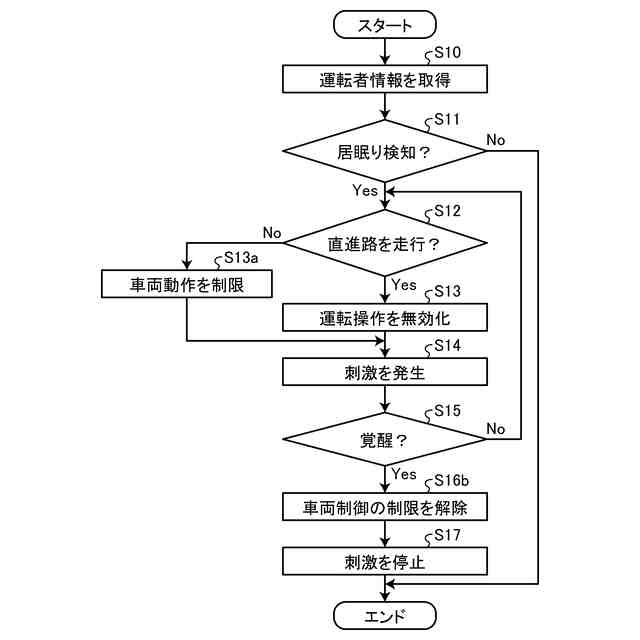
図3は、第1実施形態に係る制御装置のコントローラが実行する処理の一例を示すフローチャートである。
図4は、第2実施形態に係る制御装置が行う車両制御の制限を説明するための図である。
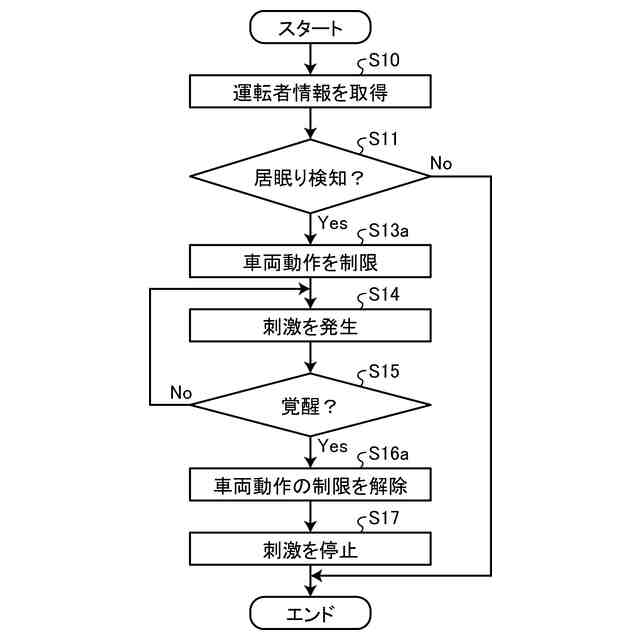
図5は、第2実施形態に係る制御装置のコントローラが実行する処理の一例を示すフローチャートである。
図6は、第2実施形態の変形例に係る制御装置が行う車両制御の制限を説明するための図である。
図7は、第3実施形態に係る制御装置のコントローラが実行する処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して、本願の開示する制御装置、プログラムおよび制御システムの実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
(第1実施形態)
図1は、第1実施形態に係る制御システム1の構成例を示すブロック図である。なお、第1実施形態に係る制御システム1は、自動車などの車両に搭載されるが、これに限定されるものではない。また、車両は、自動運転機能を備えるが、これに限られない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーテン
制御装置及び車両
5日前
株式会社デンソーテン
制御装置および制御方法
12日前
株式会社デンソーテン
回路、および制御システム
10日前
株式会社デンソーテン
電源制御装置およびプログラム
6日前
株式会社デンソーテン
算出装置および算出プログラム
7日前
株式会社デンソーテン
運転支援装置、および、プログラム
20日前
株式会社デンソーテン
電源制御装置および診断プログラム
17日前
株式会社デンソーテン
運転支援装置、および、プログラム
12日前
株式会社デンソーテン
電源制御装置および電源制御システム
19日前
株式会社デンソーテン
充電制御装置及び充電制御プログラム
6日前
株式会社デンソーテン
画像処理装置および画像処理プログラム
7日前
株式会社デンソーテン
電源制御装置および電源制御プログラム
17日前
株式会社デンソーテン
制御装置、プログラムおよび制御システム
7日前
株式会社デンソーテン
通信装置、通信方法、および、通信システム
12日前
株式会社デンソーテン
車両制御装置、車両制御方法およびプログラム
14日前
株式会社デンソーテン
制御装置、電源制御装置および電源制御システム
6日前
株式会社デンソーテン
画像処理装置、画像処理方法及び画像処理プログラム
12日前
株式会社デンソーテン
電源制御装置、電源制御システムおよび電源制御方法
5日前
株式会社デンソーテン
運転評価システム、車載装置、情報処理装置及び運転評価方法
18日前
株式会社デンソーテン
死角判定装置、方法及びプログラム、並びに、行動評価装置及びシステム
19日前
個人
カーテント
3か月前
個人
タイヤレバー
1か月前
個人
警告装置
4か月前
個人
車窓用防虫網戸
3か月前
個人
前輪キャスター
7日前
個人
小型EVシステム
4か月前
個人
ルーフ付きトライク
24日前
日本精機株式会社
ケース
4か月前
個人
タイヤ脱落防止構造
4日前
個人
車輪清掃装置
3か月前
個人
ホイルのボルト締結
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
個人
車両通過構造物
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ