TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025123923
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2024019710
出願日
2024-02-13
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
H02P
29/40 20160101AFI20250818BHJP(電力の発電,変換,配電)
要約
【課題】安定性の低下の抑制を可能とする。
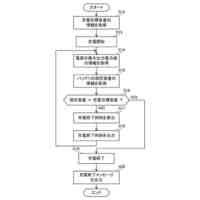
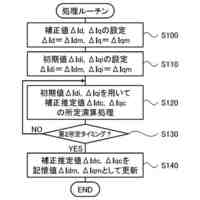
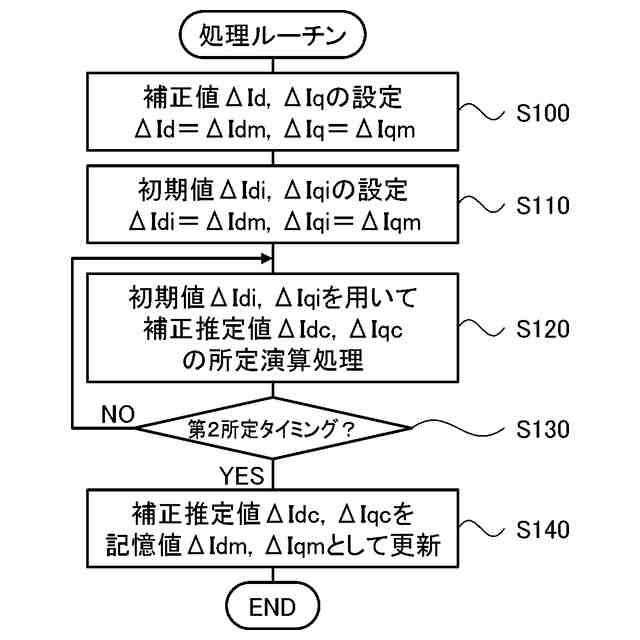
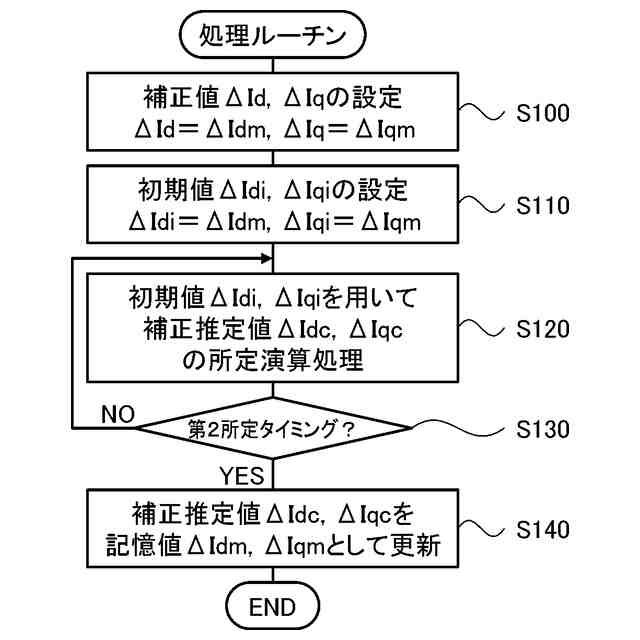
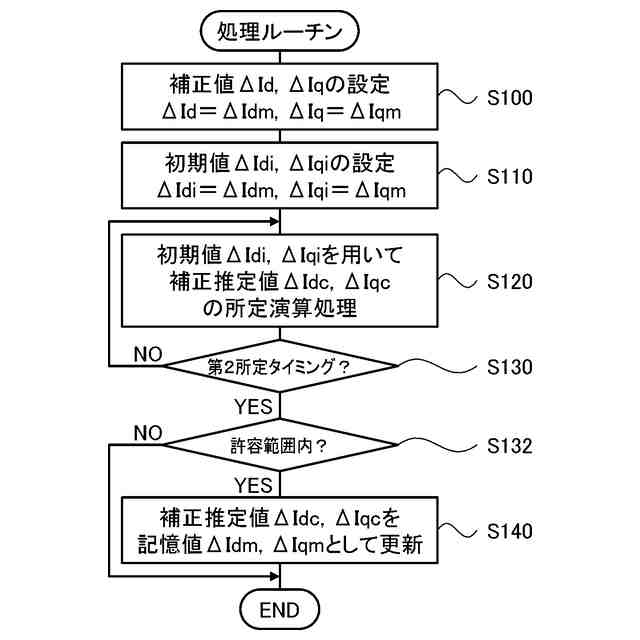
【解決手段】走行用のモータを備える車両に搭載され、処理部および記憶部を備える制御装置において、処理部は、第1所定タイミングに至ると、記憶部に記憶されている記憶値をモータの駆動制御に関連する所定パラメータに設定すると共に、記憶値を初期値として用いて所定パラメータに関連する推定値についての今回の推定処理を実行し、第2所定タイミングに至ると、今回の推定処理での推定値を記憶値として記憶部に記憶させる。
【選択図】図2
特許請求の範囲
【請求項1】
走行用のモータを備える車両に搭載され、処理部および記憶部を備える制御装置であって、
前記処理部は、
第1所定タイミングに至ると、前記記憶部に記憶されている記憶値を前記モータの駆動制御に関連する所定パラメータに設定すると共に、前記記憶値を初期値として用いて前記所定パラメータに関連する推定値についての今回の推定処理を実行し、
第2所定タイミングに至ると、今回の前記推定処理での前記推定値を前記記憶値として前記記憶部に記憶させる、
制御装置。
続きを表示(約 540 文字)
【請求項2】
請求項1記載の制御装置であって、
前記処理部は、前記第2所定タイミングに至ると、今回の前記推定処理での前記推定値が許容範囲内であるときには、前記推定値を前記記憶値として前記記憶部に記憶させ、今回の前記推定処理での前記推定値が前記許容範囲外であるときには、前記推定値を前記記憶部に記憶させない、
制御装置。
【請求項3】
請求項1または2記載の制御装置であって、
前記第1所定タイミングは、前記車両のシステム起動が指示されたタイミング、ブレーキ操作により前記車両が停車したタイミング、前記モータの駆動制御に用いるトルク指令がトルク閾値を跨いだタイミングの少なくとも1つを含み、
前記第2所定タイミングは、前記車両のシステム停止が指示されたタイミング、前記第1所定タイミングから所定時間が経過したタイミング、の少なくとも1つを含む、
制御装置。
【請求項4】
請求項1または2記載の制御装置であって、
前記所定パラメータは、前記モータの各相の相電流を検出する電流センサのゲイン誤差、前記電流センサのオフセット誤差、の少なくとも1つに基づく補正値である、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
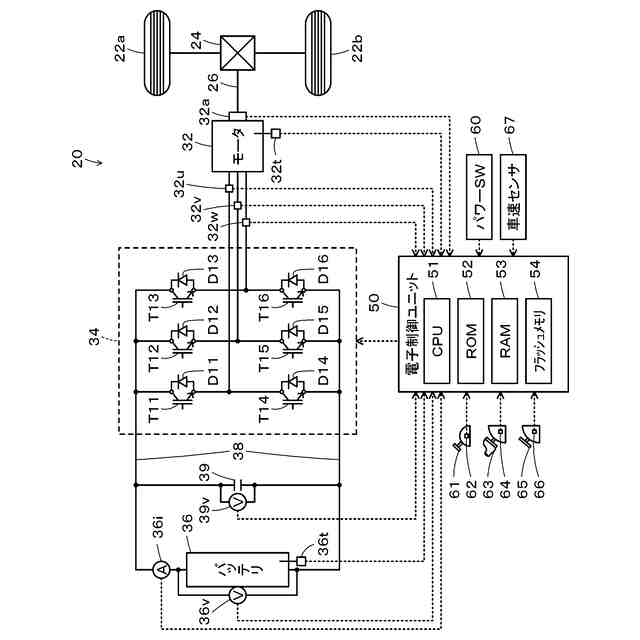
従来、電流指令値と電流センサによる検出電流値とから、電流制御部によって電圧指令値を生成する制御装置において、電圧指令値をプラントモデル部へ入力して仮想電流値を演算し、仮想電流値を座標変換部を介して周期外乱オブザーバに入力して補償値を算出し、算出された補償値を座標逆変換部を介して検出電流値に重畳して、電流センサの検出電流値を補正する制御装置が提案されている(例えば、特許文献1参照)。この制御装置では、検出電流値と補償値との重畳された値と、検出電流値と、を電流センサ誤差推定部に入力してオフセット誤差とゲイン誤差とを算出し、算出した各誤差信号に基づいて電流センサの誤差の推定を行なう。
【先行技術文献】
【特許文献】
【0003】
特開2015-69439号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
こうした制御装置において、モータの駆動制御に関連する各種パラメータのうちの一部について、逐次更新すると、誤差の大きい値に更新するなどして、モータの駆動制御の安定性の低下を招き得るものがある。
【0005】
本開示の制御装置は、モータの駆動制御の安定性の低下を抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本開示の制御装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
[1]本開示の制御装置は、
走行用のモータを備える車両に搭載され、処理部および記憶部を備える制御装置であって、
前記処理部は、
第1所定タイミングに至ると、前記記憶部に記憶されている記憶値を前記モータの駆動制御に関連する所定パラメータに設定すると共に、前記記憶値を初期値として用いて前記所定パラメータに関連する推定値についての今回の推定処理を実行し、
第2所定タイミングに至ると、今回の前記推定処理での前記推定値を前記記憶値として前記記憶部に記憶させる、
ことを要旨とする。
【0008】
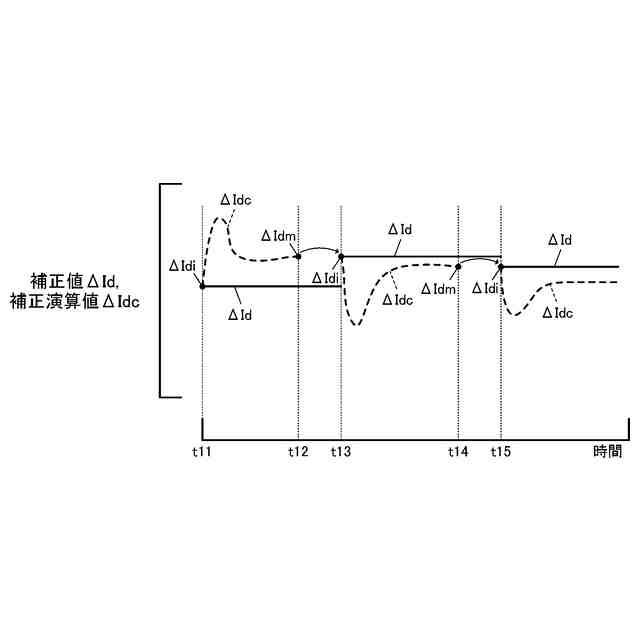
本開示の制御装置では、処理部は、第1所定タイミングに至ると、記憶部に記憶されている記憶値をモータの駆動制御に関連する所定パラメータに設定すると共に、記憶値を初期値として用いて所定パラメータに関連する推定値についての今回の推定処理を実行する。また、処理部は、第2所定タイミングに至ると、今回の推定処理での推定値を記憶値として記憶部に記憶させる。したがって、第1所定タイミングに至るごとに記憶値を所定パラメータに設定する、即ち、今回の第1所定タイミングに至ってから次回に第1所定タイミングに至るまで所定パラメータを保持することにより、所定パラメータの逐次更新(頻繁な更新)を回避し、モータの駆動制御の安定性の低下を抑制することができる。また、記憶値を初期値として用いて所定パラメータに関連する推定値についての今回の推定処理を実行することにより、今回の推定処理で推定値が収束するまでの時間が長くなるのを抑制することができる。
【0009】
ここで、所定パラメータは、急峻な変化が生じにくいと想定されるパラメータ、具体的には、第1所定タイミングと第2所定タイミングとの間隔や、今回の第1所定タイミングと次回の第1所定タイミングとの間隔において、緩やかな変化特性(単位時間当たりの変化量である変化率が所定変化率以下の変化特性)を有すると想定されるパラメータであってもよい。発明者らは、鋭意研究により、急峻な変化が生じにくいと想定されるパラメータについて、逐次更新によりモータの駆動制御の安定性の低下を招きやすいことを確認した。所定パラメータについての推定処理は、真値近傍への応答性に比して推定値の収束性を優先した処理、具体的には、真値近傍への応答性が低いものの推定値の収束性が良好な処理であってもよい。
【0010】
[2]本開示の制御装置(上述の[1]に記載の制御装置)において、前記処理部は、前記第2所定タイミングに至ると、今回の前記推定処理での前記推定値が許容範囲内であるときには、前記推定値を前記記憶値として前記記憶部に記憶させ、今回の前記推定処理での前記推定値が前記許容範囲外であるときには、前記推定値を前記記憶部に記憶させなくてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
モータ
15日前
トヨタ自動車株式会社
ロータ
14日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
光電極
21日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
モータ
9日前
トヨタ自動車株式会社
負極層
5日前
トヨタ自動車株式会社
モータ
9日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
モータ
5日前
トヨタ自動車株式会社
充電装置
5日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
燃料電池
15日前
トヨタ自動車株式会社
燃料電池
15日前
トヨタ自動車株式会社
スペーサ
2日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
15日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
報知装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ