TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127871
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024852
出願日
2024-02-21
発明の名称
画像認識装置、車載システム、画角調整方法及び画角調整プログラム
出願人
株式会社デンソーテン
代理人
弁理士法人 佐野特許事務所
主分類
H04N
23/69 20230101AFI20250826BHJP(電気通信技術)
要約
【課題】安全確保上、特に注目されるべき物体に対して画像認識処理の精度を向上させる。
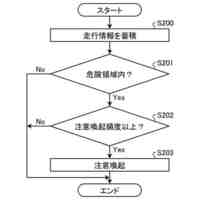
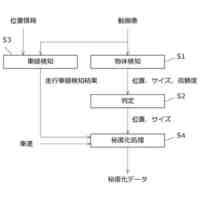
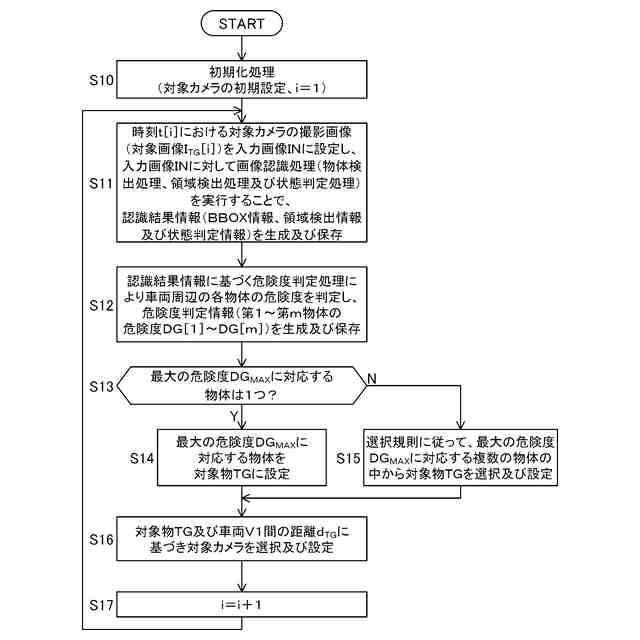
【解決手段】画像認識装置は車両に設置されるカメラの撮影画像に属する対象画像に対し画像認識処理を行う。撮影画像に基づき車両との関係において車両周辺の各物体の危険度を特定し(S12)、最大の危険度に対応する物体である対象物と車両との距離に応じて、対象画像を得るためのカメラの画角を調整する(S16)。
【選択図】図7
特許請求の範囲
【請求項1】
車両に設置されるカメラの撮影画像に属する対象画像に対し画像認識処理を行う画像認識装置であって、
前記撮影画像に基づき前記車両との関係において前記車両周辺の各物体の危険度を特定し、最大の危険度に対応する物体である対象物と前記車両との距離に応じて、前記対象画像を得るための前記カメラの画角を調整するコントローラを備える
、画像認識装置。
続きを表示(約 1,600 文字)
【請求項2】
互いに異なる画角を有する複数のカメラが前記車両に設置され、
前記コントローラは、前記複数のカメラの何れかを対象カメラに設定して前記対象カメラの撮影画像を前記対象画像として用いることで前記調整を実現し、
前記コントローラは、第1時刻における前記対象カメラの撮影画像に基づき前記車両周辺の各物体の危険度を特定することで前記対象物を設定し、前記対象物及び前記車両間の距離に応じて前記第1時刻より後の第2時刻における前記対象カメラを前記複数のカメラの中から選択する
、請求項1に記載の画像認識装置。
【請求項3】
前記複数のカメラは、第1画角を有する第1カメラ、及び、前記第1画角よりも狭い第2画角を有する第2カメラを含み、
前記コントローラは、前記第1時刻において前記対象物及び前記車両間の距離が閾距離より短いときには前記第2時刻における前記対象カメラを前記第1カメラに設定し、前記第1時刻において前記対象物及び前記車両間の距離が前記閾距離より長いときには前記第2時刻における前記対象カメラを前記第2カメラに設定する
、請求項2に記載の画像認識装置。
【請求項4】
前記カメラは画角を変更可能に構成された単一の対象カメラであって、前記対象カメラの撮影画像が前記対象画像として用いられ、
前記コントローラは、第1時刻における前記対象カメラの撮影画像に基づき前記車両周辺の各物体の危険度を特定することで前記対象物を設定し、前記対象物及び前記車両間の距離に応じて前記第1時刻より後の第2時刻における前記対象カメラの画角を設定する
、請求項1に記載の画像認識装置。
【請求項5】
前記コントローラは、前記第1時刻において前記対象物及び前記車両間の距離が閾距離より短いときには前記第2時刻における前記対象カメラの画角を第1画角に設定し、前記第1時刻において前記対象物及び前記車両間の距離が前記閾距離より長いときには前記第2時刻における前記対象カメラの画角を前記第1画角よりも狭い第2画角に設定する
、請求項4に記載の画像認識装置。
【請求項6】
前記車両周辺の各物体は前記車両周辺の人物であって、
前記コントローラは、前記車両周辺の各人物が交通ルール又は交通マナーを順守しているかに応じて前記車両周辺の各人物の危険度を特定し、
前記コントローラは、前記車両周辺の人物に含まれる注目人物の危険度を、前記注目人物が前記交通ルール又は前記交通マナーを順守している場合と比べ、順守していない場合において高く判断する
、請求項1~5の何れかに記載の画像認識装置。
【請求項7】
前記最大の危険度に対応する物体として複数の候補物体が存在する場合、前記コントローラは、前記車両と各候補物体との距離に基づき、前記複数の候補物体の中から前記対象物を選択する
、請求項1~5の何れかに記載の画像認識装置。
【請求項8】
請求項2又は3に記載の画像認識装置と、
前記複数のカメラと、を備える
、車載システム。
【請求項9】
請求項4又は5に記載の画像認識装置と、
前記単一のカメラと、を備える
、車載システム。
【請求項10】
車両に設置されるカメラの撮影画像に属する対象画像に対し画像認識処理を行う画像認識装置にて実行される画角調整方法であって、
前記撮影画像に基づき前記車両との関係において前記車両周辺の各物体の危険度を特定し、最大の危険度に対応する物体である対象物と前記車両との距離に応じて、前記対象画像を得るための前記カメラの画角を調整する
、画角調整方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像認識装置、車載システム、画角調整方法及び画角調整プログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
車両に設置されたカメラの撮影画像に基づく画像認識処理により車両周辺の各物体を検出し、検出結果に基づく通知を運転手に行う又は検出結果に基づく走行制御を行うといった技術が実用化されている。尚、下記特許文献1には、画角が異なる複数のカメラを設けておき、車両の速度に応じて、使用するカメラを切り替える方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-24120号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
画像認識処理を適正に行うために(画像認識処理の精度向上を図るために)、画像認識の対象画像内における物体のサイズ(画像サイズ)を適正にすることが望ましい。一方、車両又は歩行者等の安全確保のためには、車両周辺の物体の内、安全確保上、特に注目されるべき物体に対して画像認識処理の精度を向上させることが肝要である。カメラの画角調整により物体の画像サイズを調整できるが、どのように画角調整を行うかについて工夫が必要である。尚、画像認識を利用して検出又は予測可能な危険な状況(歩行者の車道飛び出し等)は、車両速度に関係なく発生し得るものであり、故に車両速度に基づきカメラを切り替える方法(特許文献1参照)には改善の余地がある。
【0005】
本発明は、安全確保上、特に注目されるべき物体に対して画像認識処理の精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る画像認識装置は、車両に設置されるカメラの撮影画像に属する対象画像に対し画像認識処理を行う画像認識装置であって、前記撮影画像に基づき前記車両との関係において前記車両周辺の各物体の危険度を特定し、最大の危険度に対応する物体である対象物と前記車両との距離に応じて、前記対象画像を得るための前記カメラの画角を調整するコントローラを備える。
【発明の効果】
【0007】
画像認識処理を適正に行うために(画像認識理の精度向上を図るために)、画像認識の対象画像内における物体のサイズを適正にすることが望ましい。一方、車両又は歩行者等の安全確保のためには、危険度が相対的に低い物体よりも危険度が相対的に高い物体に対して適正な画像認識処理を行うことが好ましく、故に後者の物体のサイズ(画像サイズ)を適正にすることが好ましい。本発明に係る画像認識装置によれば、車両周辺の各物体の内、最大の危険度に対応する物体(対象物)と車両との距離に応じて画角調整が行われる。このため、当該距離に応じて対象画像上における対象物のサイズを適正化でき、危険度の高い対象物に対する画像認識処理の精度向上が期待される。結果、車両又は歩行者等の安全確保が促進される。
【図面の簡単な説明】
【0008】
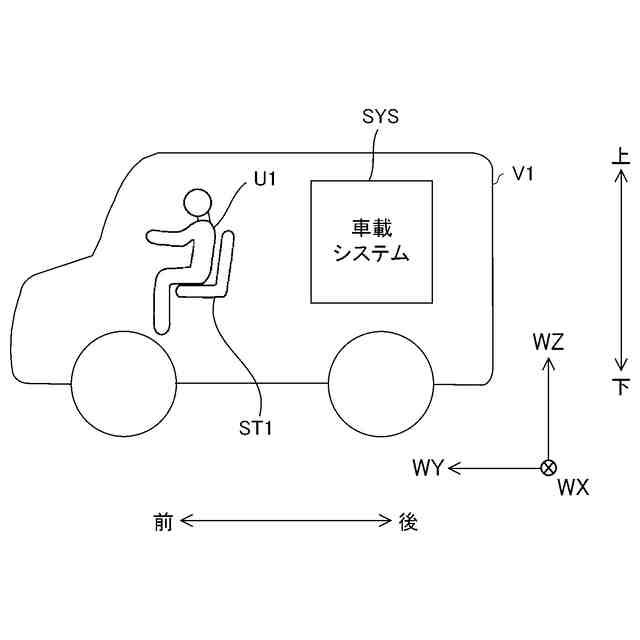
本発明の実施形態に係り、ユーザと他の構成要素との関係を示す図である。
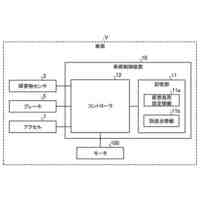
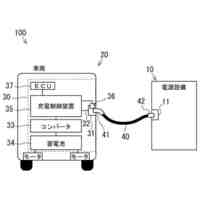
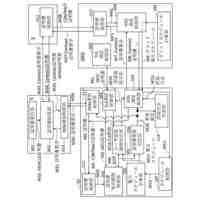
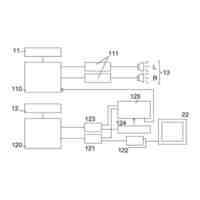
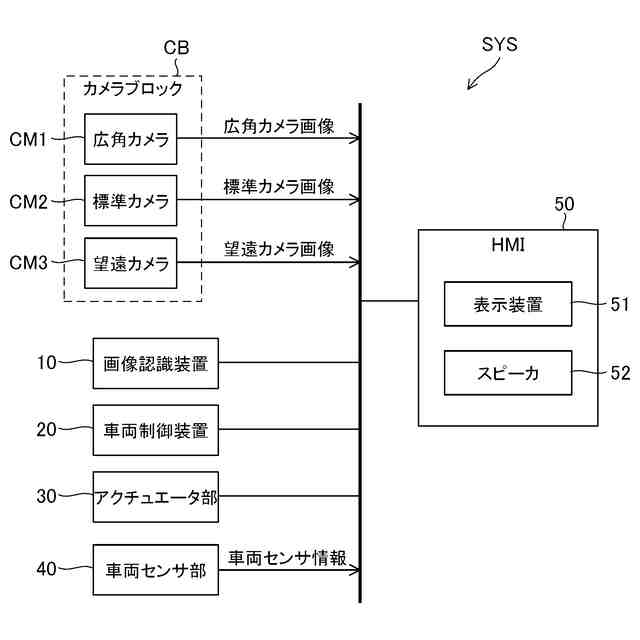
本発明の実施形態に係る車載システムの内部構成図である。
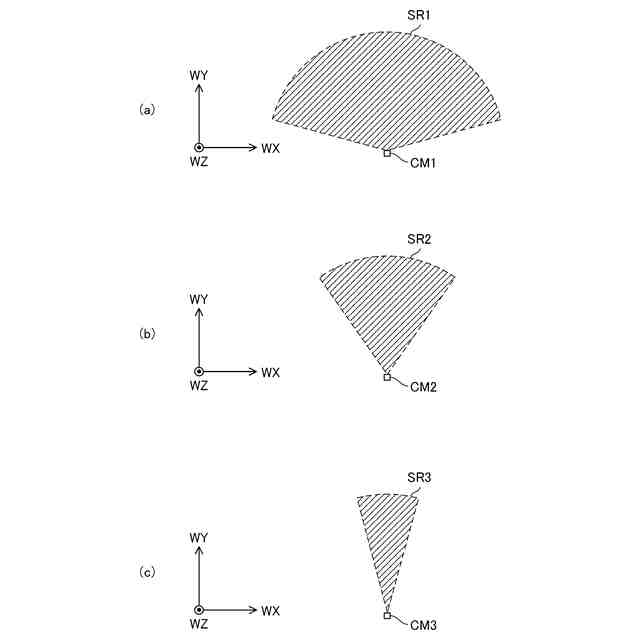
本発明の実施形態に係り、広角カメラ、標準カメラ及び望遠カメラの各撮影領域を示す図である。
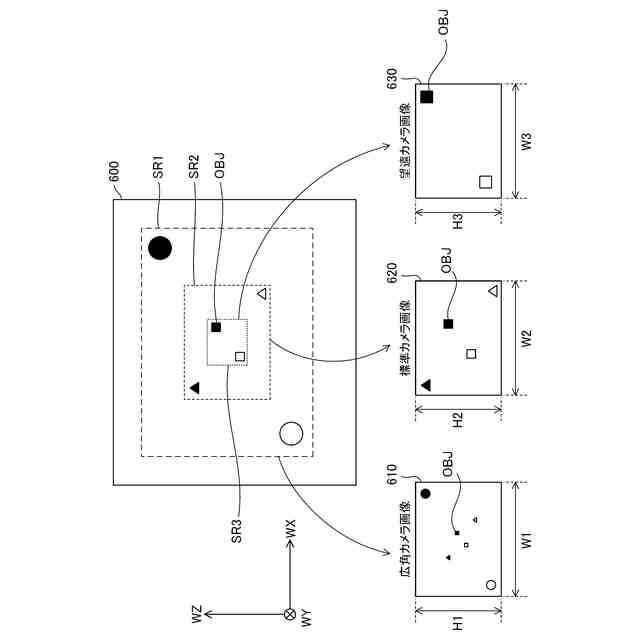
本発明の実施形態に係り、撮影に関わる風景と、風景を撮影することで得られる広角カメラ画像、標準カメラ画像及び望遠カメラ画像と、の関係を示す図である。
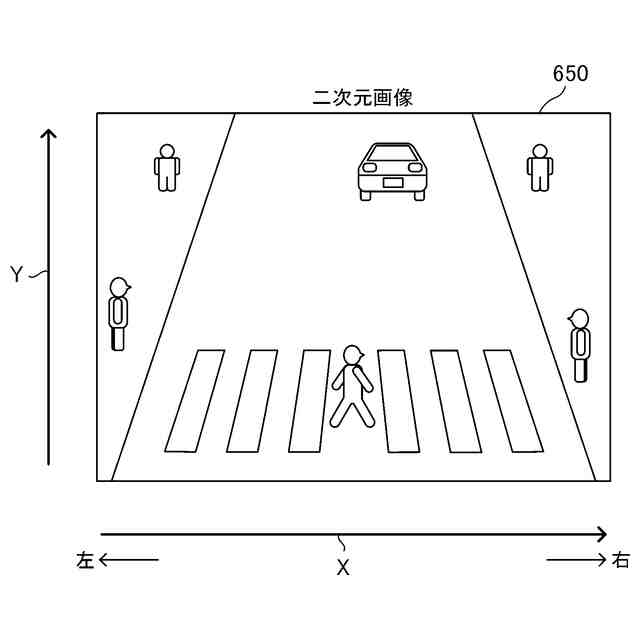
本発明の実施形態に係り、撮影により得られる二次元画像の例を示す図である。
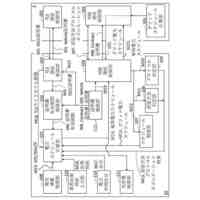
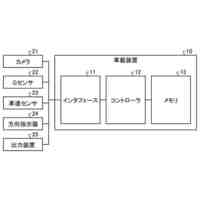
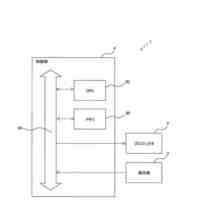
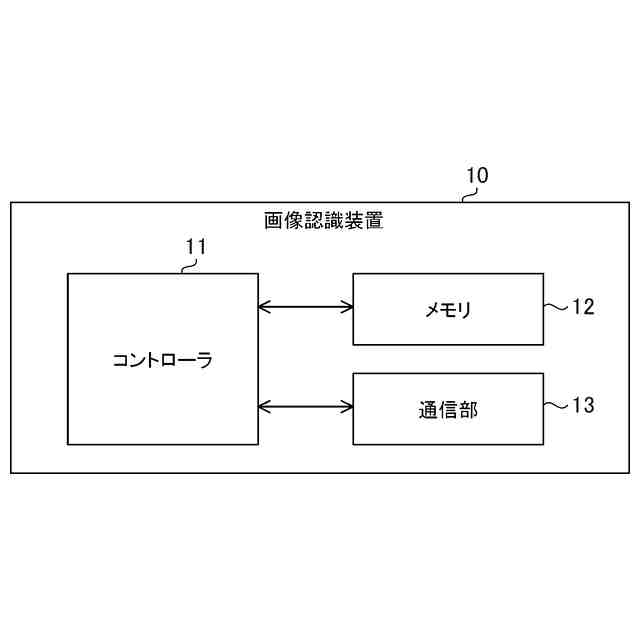
本発明の実施形態に係り、画像認識装置の内部ブロック図である。
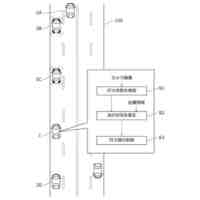
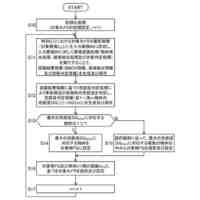
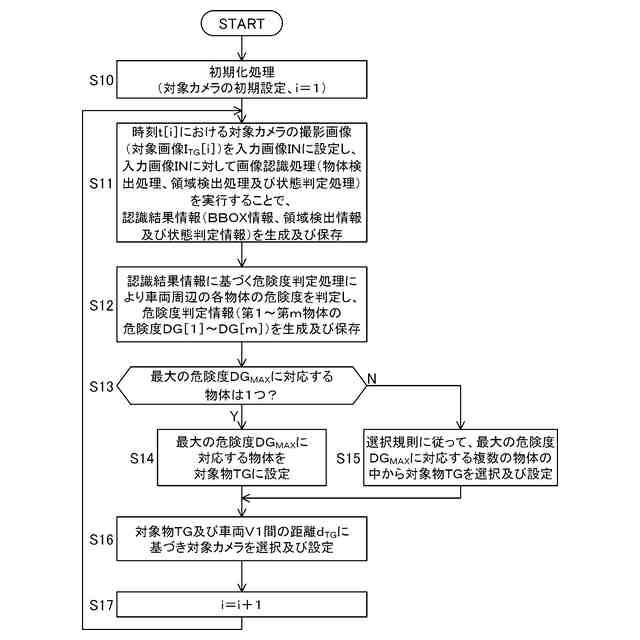
本発明の実施形態に属する実施例EX1_Aに係り、コントローラの動作フローチャートである。
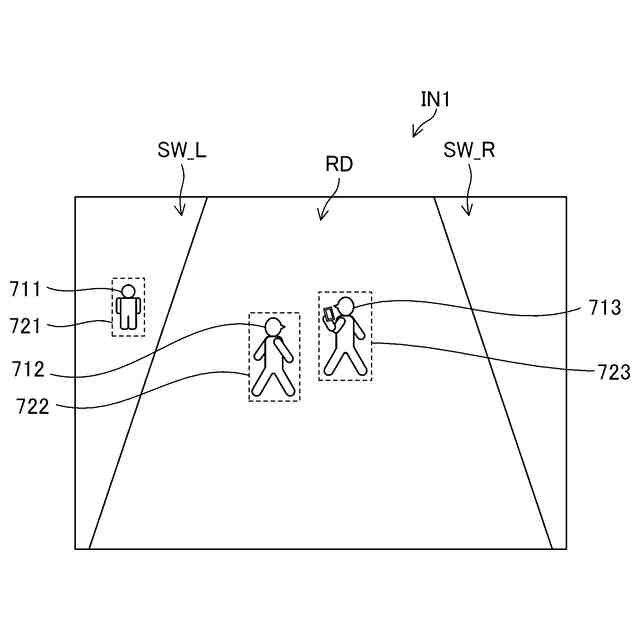
本発明の実施形態に属する実施例EX1_Aに係り、入力画像の例を示す図である。
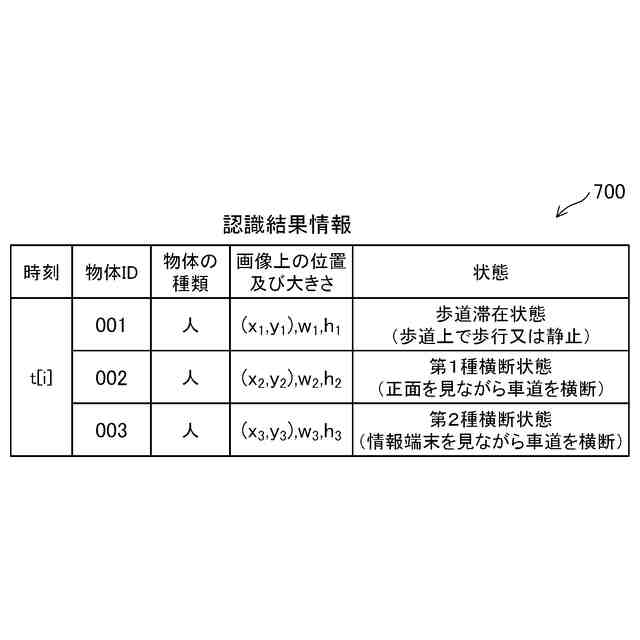
本発明の実施形態に属する実施例EX1_Aに係り、画像認識処理により得られる認識結果情報を示す図である。
本発明の実施形態に属する実施例EX1_Aに係り、画像認識処理により得られる認識結果情報と危険度判定処理により得られる危険度判定情報を示す図である。
本発明の実施形態に属する実施例EX1_Aに係り、危険度判定テーブルの構成図である。
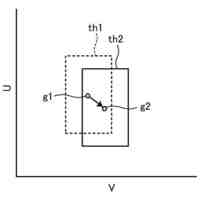
本発明の実施形態に属する実施例EX1_Aに係り、対象物及び車両間の距離に応じた対象カメラの設定方法の説明図である。
本発明の実施形態に属する実施例EX1_Aに係り、対象カメラによる撮影画像(対象画像)の時系列変化を示す図である。
本発明の実施形態に属する実施例EX1_Cに係り、対象画像の一部画像領域を示すための図である。
本発明の実施形態に属する実施例EX2_Aに係り、カメラブロックに画角可変カメラが設けられる様子を示す図である。
本発明の実施形態に属する実施例EX2_Aに係り、コントローラの動作フローチャートである。
本発明の実施形態に属する実施例EX3に係り、対象カメラから得られる撮影画像列を示す図である。
本発明の実施形態に属する実施例EX3に係り、車両の前方の風景を示す図である。
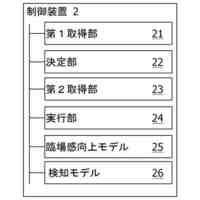
本発明の実施形態に属する実施例EX4に係り、コントローラの機能ブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態の例を、図面を参照して具体的に説明する。参照される各図において、同一の部分には同一の符号を付し、同一の部分に関する重複する説明を原則として省略する。尚、本明細書では、記述の簡略化上、情報、信号、物理量、機能部、回路、素子又は部品等を参照する記号又は符号を記すことによって、該記号又は符号に対応する情報、信号、物理量、機能部、回路、素子又は部品等の名称を省略又は略記することがある。例えば、後述の“CM1”によって参照される広角カメラは(図2参照)、広角カメラCM1と表記されることもあるし、カメラCM1と略記されることもあり得るが、それらは全て同じものを指す。
【0010】
図1に本発明の実施形態にて想定されるユーザU1と他の構成要素との関係を示す。ユーザU1は車両V1の乗員である。ユーザU1は車両V1の運転者である。以下、単に運転者といった場合、それは車両V1の運転者(故にユーザU1)を指すものとする。但し、ユーザU1は運転者以外の乗員(即ち車両V1の同乗者)であっても良い。車両V1は任意の種類の車両である。ここでは車両V1は路面上を走行する自動車等であるとする。車両V1に対し車載システムSYSが搭載される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーテン
電源制御装置
21日前
株式会社デンソーテン
制御装置及び車両
6日前
株式会社デンソーテン
制御装置および制御方法
13日前
株式会社デンソーテン
電源回路および制御装置
今日
株式会社デンソーテン
回路、および制御システム
11日前
株式会社デンソーテン
車載装置およびプログラム
29日前
株式会社デンソーテン
電源制御装置およびプログラム
7日前
株式会社デンソーテン
算出装置および算出プログラム
8日前
株式会社デンソーテン
車両制御装置および車両制御方法
25日前
株式会社デンソーテン
運転支援装置、および、プログラム
13日前
株式会社デンソーテン
運転支援装置、および、プログラム
21日前
株式会社デンソーテン
電源制御装置および診断プログラム
18日前
株式会社デンソーテン
電源制御装置および電源制御システム
20日前
株式会社デンソーテン
充電制御装置及び充電制御プログラム
7日前
株式会社デンソーテン
画像処理装置及び画像処理プログラム
25日前
株式会社デンソーテン
画像処理装置および画像処理プログラム
8日前
株式会社デンソーテン
電源制御装置および電源制御プログラム
18日前
株式会社デンソーテン
制御装置、プログラムおよび制御システム
8日前
株式会社デンソーテン
車載装置、情報処理方法およびプログラム
21日前
株式会社デンソーテン
通信装置、通信方法、および、通信システム
13日前
株式会社デンソーテン
高温検査方法、検査システム、及び電子機器
今日
株式会社デンソーテン
車両制御装置、車両制御方法およびプログラム
15日前
株式会社デンソーテン
制御装置、電源制御装置および電源制御システム
7日前
株式会社デンソーテン
電源制御装置、電源制御システムおよび電源制御方法
6日前
株式会社デンソーテン
画像処理装置、画像処理方法及び画像処理プログラム
13日前
株式会社デンソーテン
運転評価システム、車載装置、情報処理装置及び運転評価方法
19日前
株式会社デンソーテン
画像認識装置、車載システム、画角調整方法及び画角調整プログラム
今日
株式会社デンソーテン
死角判定装置、方法及びプログラム、並びに、行動評価装置及びシステム
20日前
株式会社デンソーテン
臨場感向上装置、臨場感向上方法、臨場感向上プログラム及び臨場感向上システム
今日
株式会社デンソーテン
サービス提供装置、サービス提供方法、サービス提供プログラム、ユーザ端末装置用プログラム、サービス提供システム、および、ユーザ端末装置
25日前
個人
携帯端末保持具
3か月前
個人
音響装置
3か月前
個人
店内配信予約システム
1か月前
日本無線株式会社
音声通信方式
3か月前
日本精機株式会社
投影システム
3か月前
サクサ株式会社
中継装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ