TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128649
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025439
出願日
2024-02-22
発明の名称
ロボットハンド、反転装置及び反転方法
出願人
株式会社日清製粉グループ本社
代理人
個人
主分類
B25J
15/08 20060101AFI20250827BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 パンを自動で把持し反転させることができるロボットハンドを提供する。
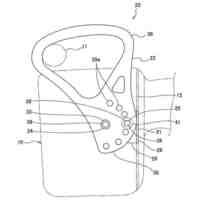
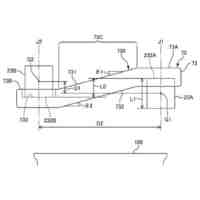
【解決手段】 パンを裏表反転するためのロボットハンドは、矩形状の基部、前記基部の幅方向両端部のそれぞれに立設する矩形状の第1側部及び第2側部により形成される断面コの字形状の棒状体で、前記基部の内壁面を対向させて配置され、前記パンを把持する2本の把持部と、前記2本の把持部の間隔を調整する間隔調整部と、前記2本の把持部の間の前記把持部の長手方向に平行な方向を軸として前記2本の把持部を反転する反転部とを備え、前記第1側部の縁部及び前記第2側部の縁部により形成される開口部の幅は、前記パンの厚みより大きい。
【選択図】図1
特許請求の範囲
【請求項1】
パンを裏表反転するためのロボットハンドであって、
矩形状の基部、前記基部の幅方向両端部のそれぞれに立設する矩形状の第1側部及び第2側部により形成される断面コの字形状の棒状体で、前記基部の内壁面を対向させて配置され、前記パンを把持する2本の把持部と、
前記2本の把持部の間隔を調整する間隔調整部と、
前記2本の把持部の間の前記把持部の長手方向に平行な方向を軸として前記2本の把持部を反転する反転部と、を備え、
前記第1側部の縁部及び前記第2側部の縁部により形成される開口部の幅は、前記パンの厚みより大きいことを特徴とするロボットハンド。
続きを表示(約 1,600 文字)
【請求項2】
前記間隔調整部は、前記2本の把持部が前記パンを把持するとき、前記2本の把持部それぞれの前記基部の内壁面の間隔を、前記2本の把持部により把持される前記パンの幅の0.95~1.05倍に調整することを特徴とする請求項1記載のロボットハンド。
【請求項3】
前記2本の把持部それぞれの前記第1側部及び前記第2側部の少なくとも一方の少なくとも一部の縁部内側は、面取りされていることを特徴とする請求項1または請求項2記載のロボットハンド。
【請求項4】
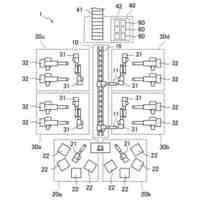
パンを裏表反転するための反転装置であって、
前記パンを搬送するコンベアーと、
前記コンベアーに載置された前記パンを検知するセンサーと、
前記コンベアーに載置された前記パンを裏表反転するロボットハンドと、を備え、
前記ロボットハンドは、
矩形状の基部、前記基部の幅方向両端部のそれぞれに立設する矩形状の第1側部及び第2側部により形成される断面コの字形状の棒状体で、前記基部の内壁面を対向させて配置され、前記パンを把持する2本の把持部と、
前記2本の把持部の間隔を調整する間隔調整部と、
前記2本の把持部の間の前記把持部の長手方向に平行な方向を軸として前記2本の把持部を反転する反転部と、を有し、
前記第1側部の縁部及び前記第2側部の縁部により形成される開口部の幅は、前記パンの厚みより大きいことを特徴とする反転装置。
【請求項5】
前記間隔調整部は、前記2本の把持部が前記パンを把持するとき、前記2本の把持部それぞれの前記基部の内壁面の間隔を、前記2本の把持部により把持される前記パンの幅の0.95~1.05倍に調整することを特徴とする請求項4記載の反転装置。
【請求項6】
前記2本の把持部それぞれの前記第1側部及び前記第2側部の少なくとも一方の少なくとも一部の縁部内側は、面取りされていることを特徴とする請求項4または請求項5記載の反転装置。
【請求項7】
前記パンの一方の面に油脂含有シーズニングを塗布する塗布機構を更に備えることを特徴とする請求項4または請求項5記載の反転装置。
【請求項8】
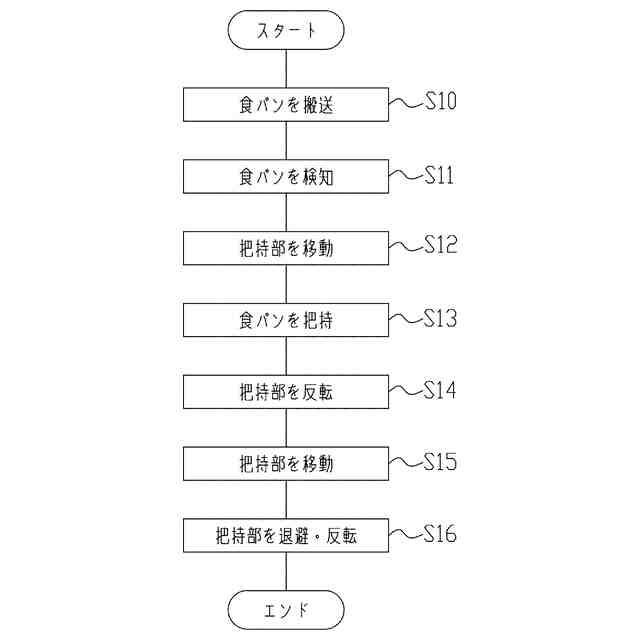
パンを裏表反転するための反転装置を用いて前記パンを裏表反転する反転方法であって、
載置された前記パンを搬送する搬送工程と、
前記搬送工程において搬送された前記パンをセンサーにより検知する検知工程と、
前記検知工程において前記パンが検知されると、矩形状の基部、前記基部の幅方向両端部のそれぞれに立設する矩形状の第1側部及び第2側部により形成される断面コの字形状の棒状体で、前記基部の内壁面を対向させて配置され、前記パンを把持する2本の把持部を、前記パンを挟む位置に移動させる移動工程と、
間隔調整部により前記2本の把持部の間隔を調整することによって、前記第1側部の縁部及び前記第2側部の縁部により形成される前記パンの厚みより大きい幅を有する開口部から前記パンを受け入れることにより前記2本の把持部で前記パンを把持する把持工程と、
前記パンを把持した2本の把持部を上昇させて、反転部により前記2本の把持部の間の前記把持部の長手方向に平行な方向を軸として前記2本の把持部を反転する反転工程と、
を含むことを特徴とする反転方法。
【請求項9】
前記把持工程は、前記2本の把持部それぞれの前記基部の内壁面の間隔を、前記2本の把持部により把持される前記パンの幅の0.95~1.05倍に調整することを特徴とする請求項8記載の反転方法。
【請求項10】
塗布機構により前記パンの一方の面に油脂含有シーズニングを塗布する塗布工程を更に含むことを特徴とする請求項8または請求項9記載の反転方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、パンを裏表反転するためのロボットハンド、該ロボットハンドを備えた反転装置、及び該反転装置を用いた反転方法に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
サンドイッチを製造する際、パンに挟まれる具と接触するパンの表面に、具から染み出る水分がパンに浸み込まないようにするため、マーガリン、バター、マヨネーズ等の油脂を含有するシーズニングを塗布することがある。したがって、サンドイッチを製造する工程として、2枚のパンに油脂含有シーズニングを塗布する工程、一方のパンの上に具を静置する工程、油脂含有シーズニングが塗布された面が具に接触する面になるように他方のパンの裏表を反転する工程、及び他方のパンを具が載った一方のパンに重ねる工程が必要である。
【0003】
これらの工程の中で、人の手により行われているパンを持ち上げて裏表反転させる工程の自動化が望まれている。なお、パンのように柔らかく変形しやすい食品を把持するためのロボットハンドとして特許文献1~4等に開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-077147号公報
特開2021-154440号公報
特開2018-020419号公報
特開平07-060676号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したようにパンは柔らかく変形しやすいだけでなく、厚さが薄く、厚さに対して面が大きいため、特許文献1~4に記載のロボットハンドで把持することは困難であった。また、ロボットハンドによりパンを反転させることは更に困難であった。
【0006】
更に、例えばシーズニングが塗布された面をロボットハンドで把持すると、シーズニングがロボットハンドに付着し、その付着物がシーズニングを塗布しない面等に付着するおそれがあった。
【0007】
本発明の目的は、パンを自動で把持し反転させることができるロボットハンド、該ロボットハンドを備えた反転装置、及び該反転装置を用いた反転方法を提供することである。
【課題を解決するための手段】
【0008】
本発明のロボットハンドは、パンを裏表反転するためのロボットハンドであって、矩形状の基部、前記基部の幅方向両端部のそれぞれに立設する矩形状の第1側部及び第2側部により形成される断面コの字形状の棒状体で、前記基部の内壁面を対向させて配置され、前記パンを把持する2本の把持部と、前記2本の把持部の間隔を調整する間隔調整部と、前記2本の把持部の間の前記把持部の長手方向に平行な方向を軸として前記2本の把持部を反転する反転部と、を備え、前記第1側部の縁部及び前記第2側部の縁部により形成される開口部の幅は、前記パンの厚みより大きいことを特徴とする。
【0009】
また、本発明のロボットハンドの前記間隔調整部は、前記2本の把持部が前記パンを把持するとき、前記2本の把持部それぞれの前記基部の内壁面の間隔を、前記2本の把持部により把持される前記パンの幅の0.95~1.05倍に調整することを特徴とする。
【0010】
また、本発明のロボットハンドは、前記2本の把持部それぞれの前記第1側部及び前記第2側部の少なくとも一方の少なくとも一部の縁部内側が面取りされていることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
24日前
個人
折りたたみ工具
7日前
株式会社三協システム
製函機
5日前
CKD株式会社
把持装置
6日前
株式会社三協システム
移載装置
4日前
株式会社不二越
ロボット操作装置
12日前
株式会社不二越
ロボットシステム
18日前
日本精工株式会社
締結用工具
21日前
SMC株式会社
着脱装置
5日前
株式会社ミクロブ
把持装置
6日前
太陽パーツ株式会社
アシストスーツ
7日前
ARMA株式会社
ジョイントフレーム
19日前
トヨタ自動車株式会社
カプラ接続治具
28日前
株式会社不二越
ロボットシステム
4日前
株式会社不二越
ロボットシステム
7日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
10日前
大和ハウス工業株式会社
ねじ回転工具
5日前
株式会社不二越
協働ロボットシステム
1か月前
ダイハツ工業株式会社
移載治具
19日前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
1か月前
セイコーエプソン株式会社
ロボット
24日前
セイコーエプソン株式会社
ロボット
5日前
セイコーエプソン株式会社
ロボット
18日前
セイコーエプソン株式会社
ロボット
14日前
コネクテッドロボティクス株式会社
保持システム
1か月前
シヤチハタ株式会社
マーキング装置
10日前
シヤチハタ株式会社
マーキング装置
10日前
北越メタル株式会社
鉄筋保持具
1か月前
株式会社マキタ
電動工具
5日前
株式会社マキタ
電動工具
5日前
川崎重工業株式会社
作業設備
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
タイガー産業株式会社
アタッチメント
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ