TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128765
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025668
出願日
2024-02-22
発明の名称
外界認識システム、車両制御装置、走行路認識方法、及びプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20250827BHJP(信号)
要約
【課題】前方画像に自車区画線が映っていない場合であっても、その存在を認識することができる外界認識システムを提供すること。
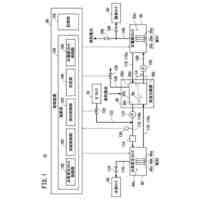
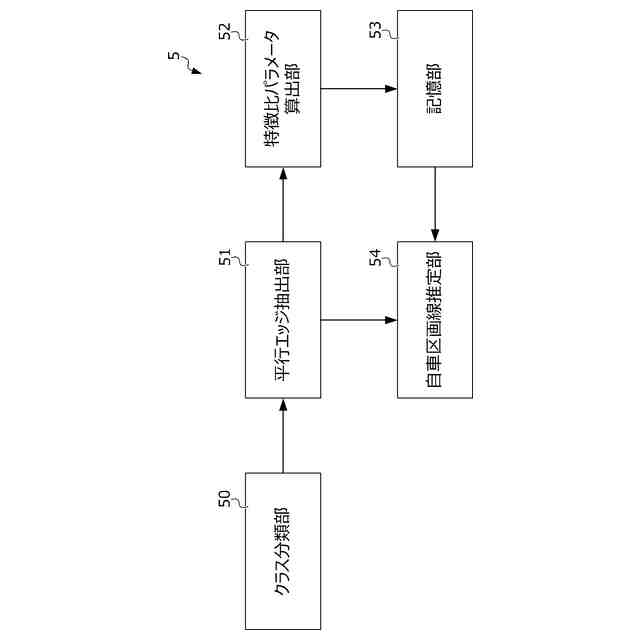
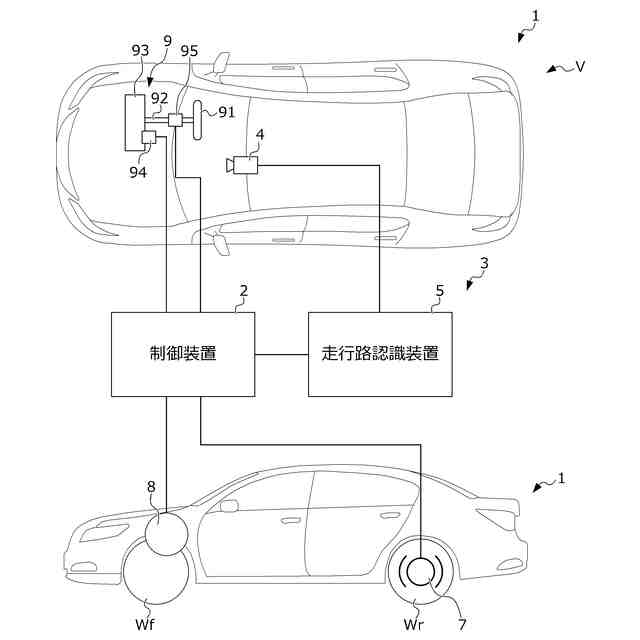
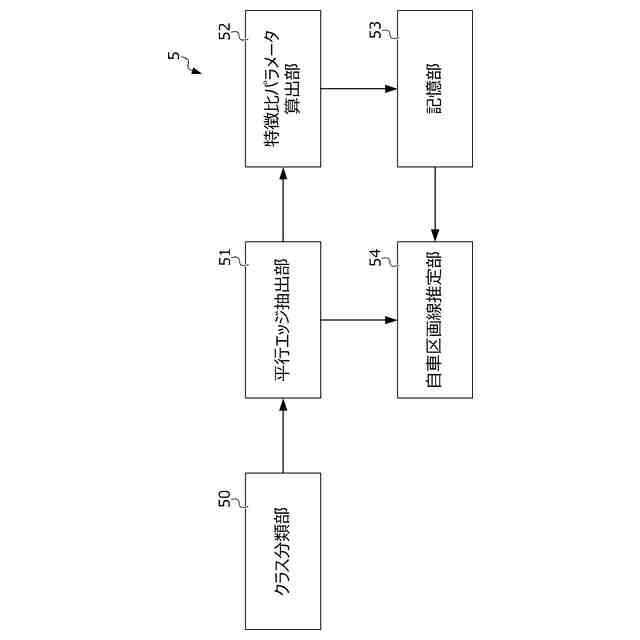
【解決手段】外界認識システムの走行路認識装置5は、自車両の前方画像の被写体を複数のクラスに分類し、エッジ画像を生成するクラス分類部50と、エッジ画像の中から、自車区画線エッジと複数の平行エッジと、をクラス毎に抽出する平行エッジ抽出部51と、エッジ画像において幅方向に沿って延びる横基準線に沿った基準エッジ及び比較エッジ間の比較距離と基準エッジ及び自車区画線エッジ間の自車区画線距離との特徴比と相関のある特徴比パラメータの値を算出する特徴比パラメータ算出部52と、現在時刻における基準エッジ及び比較エッジの位置と、現在時刻より過去の時刻における特徴比パラメータの値と、に基づいて現在時刻における自車区画線の位置を推定する自車区画線推定部54と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
自車両から視て前方側の画像を前方画像として取得する前方画像取得手段と、
前記前方画像に基づいて前記自車両の走行路を認識する走行路認識手段と、を備える外界認識システムであって、
前記走行路認識手段は、
前記前方画像に対しセグメンテーション処理を施すことにより、当該前方画像の被写体を、前記走行路を区画する自車区画線を含む複数のクラスに分類するとともに、前記クラスのエッジを抽出したエッジ画像を生成する分類手段と、
前記エッジ画像の中から、前記自車区画線のエッジである自車区画線エッジと、前記前方画像取得手段の視野を平面視した場合に前記自車区画線エッジに対し平行な複数の平行エッジと、を前記クラス毎に抽出するとともに、複数の前記平行エッジの中から1つを基準エッジとして選択する平行エッジ抽出手段と、
複数の前記平行エッジのうち前記基準エッジ以外を比較エッジとし、前記エッジ画像において幅方向に沿って延びる横基準線に沿った前記基準エッジ及び前記比較エッジ間の第1距離と前記基準エッジ及び前記自車区画線エッジ間の第2距離との特徴比と相関のある特徴比パラメータの値を算出する特徴比パラメータ算出手段と、
現在時刻より過去の時刻において前記特徴比パラメータ算出手段によって算出された前記特徴比パラメータの値を記憶する記憶手段と、
前記現在時刻における前記基準エッジ及び前記比較エッジの位置と、前記記憶手段に記憶された前記特徴比パラメータの値と、に基づいて前記現在時刻における前記自車区画線の位置を推定する自車区画線推定手段と、を備えることを特徴とする外界認識システム。
続きを表示(約 2,800 文字)
【請求項2】
前記平行エッジ抽出手段は、前記エッジ画像において共通の消失点を中心とした消失範囲へ向けて延びるエッジを前記平行エッジとして抽出することを特徴とする請求項1に記載の外界認識システム。
【請求項3】
前記平行エッジ抽出手段は、
前記横基準線と平行な1以上の区分線によって、前記エッジ画像に存在するエッジを複数のエッジ線分に仮想的に分割し、
前記エッジ画像に含まれる複数のエッジのうち、前記区分線によって仮想的に区画される分割区画毎に定められた前記消失範囲に向けて延びる前記エッジ線分を複数有するものを前記平行エッジとして抽出することを特徴とする請求項2に記載の外界認識システム。
【請求項4】
前記特徴比パラメータ算出手段は、前記特徴比パラメータの値を前記分割区画毎に算出し、
前記記憶手段は、前記特徴比パラメータ算出手段によって算出された前記特徴比パラメータの値を前記分割区画毎に記憶し、
前記自車区画線推定手段は、前記現在時刻における前記自車区画線の位置を、前記記憶手段において前記分割区画毎に記憶された前記特徴比パラメータの値に基づいて、前記分割区画毎に推定することを特徴とする請求項3に記載の外界認識システム。
【請求項5】
前記走行路認識手段は、前記平行エッジ抽出手段によって抽出された前記自車区画線エッジの位置と前記自車区画線推定手段によって推定された前記自車区画線の位置との比較に基づいて、前記比較エッジ毎に信頼度の値を算出する信頼度算出手段をさらに備え、
前記記憶手段は、前記現在時刻より過去の時刻において前記信頼度算出手段によって算出された前記信頼度の値を記憶し、
前記自車区画線推定手段は、前記現在時刻における前記基準エッジ及び前記比較エッジの位置と、前記記憶手段に記憶された前記特徴比パラメータ及び前記信頼度の値と、に基づいて前記現在時刻における前記自車区画線の位置を推定することを特徴とする請求項1に記載の外界認識システム。
【請求項6】
前記自車区画線推定手段は、前記現在時刻における前記特徴比の値と前記記憶手段に記憶された前記特徴比パラメータの値に基づいて算出される前記特徴比の値とが等しくなるように、前記現在時刻における前記自車区画線の位置を推定することを特徴とする請求項1から5の何れかに記載の外界認識システム。
【請求項7】
前記自車区画線推定手段は、
前記基準エッジ及び前記比較エッジの位置を前記自車区画線の位置に関連付ける自車区画線位置推定モデルを用いることによって前記現在時刻における前記自車区画線の位置を推定するモデル推定手段と、
前記記憶手段に記憶された前記特徴比パラメータの値に基づいて前記自車区画線位置推定モデルを更新するモデル更新手段と、を備えることを特徴とする請求項1から5の何れかに記載の外界認識システム。
【請求項8】
請求項1から5の何れかに記載の外界認識システムと、
前記外界認識システムによる認識結果に基づいて前記自車両の操舵機構、走行駆動装置、及び制動装置の少なくとも何れかを制御する制御装置と、を備える車両制御装置であって、
前記制御装置は、前記前方画像に前記自車区画線に分類される被写体が映っていなかった場合、前記自車区画線推定手段によって推定された前記自車区画線の位置に基づいて前記操舵機構、前記走行駆動装置、及び前記制動装置の少なくとも何れかを制御することを特徴とする車両制御装置。
【請求項9】
自車両から視て前方側を撮影する前方画像取得手段によって取得された前方画像に基づいて前記自車両の走行路をコンピュータによって認識する走行路認識方法であって、
前記前方画像に対しセグメンテーション処理を施すことにより、当該前方画像の被写体を、前記走行路を区画する自車区画線を含む複数のクラスに分類するとともに、前記クラスのエッジを抽出したエッジ画像を生成するステップと、
前記エッジ画像の中から、前記自車区画線のエッジである自車区画線エッジと、前記前方画像取得手段の視野を平面視した場合に前記自車区画線エッジに対し平行な複数の平行エッジと、を前記クラス毎に抽出するとともに、複数の前記平行エッジの中から1つを基準エッジとして選択するステップと、
複数の前記平行エッジのうち前記基準エッジ以外を比較エッジとし、前記エッジ画像において幅方向に沿って延びる横基準線に沿った前記基準エッジ及び前記比較エッジ間の第1距離と前記基準エッジ及び前記自車区画線エッジ間の第2距離との特徴比と相関のある特徴比パラメータの値を算出するステップと、
現在時刻より過去の時刻における前記特徴比パラメータの値を記憶手段で記憶するステップと、
前記現在時刻における前記基準エッジ及び前記比較エッジの位置と、前記記憶手段に記憶された前記特徴比パラメータの値と、に基づいて前記現在時刻における前記自車区画線の位置を推定するステップと、を備えることを特徴とする走行路認識方法。
【請求項10】
自車両から視て前方側を撮影する前方画像取得手段によって取得された前方画像に基づいて前記自車両の走行路をコンピュータによって認識させるプログラムであって、
前記コンピュータに、
前記前方画像に対しセグメンテーション処理を施すことにより、当該前方画像の被写体を、前記走行路を区画する自車区画線を含む複数のクラスに分類するとともに、前記クラスのエッジを抽出したエッジ画像を生成するステップと、
前記エッジ画像の中から、前記自車区画線のエッジである自車区画線エッジと、前記前方画像取得手段の視野を平面視した場合に前記自車区画線エッジに対し平行な複数の平行エッジと、を前記クラス毎に抽出するとともに、複数の前記平行エッジの中から1つを基準エッジとして選択するステップと、
複数の前記平行エッジの中から1つを基準エッジとして選択するステップと、
複数の前記平行エッジのうち前記基準エッジ以外を比較エッジとし、前記エッジ画像において幅方向に沿って延びる横基準線に沿った前記基準エッジ及び前記比較エッジ間の第1距離と前記基準エッジ及び前記自車区画線エッジ間の第2距離との特徴比と相関のある特徴比パラメータの値を算出するステップと、
現在時刻より過去の時刻における前記特徴比パラメータの値を記憶手段で記憶するステップと、
前記現在時刻における前記基準エッジ及び前記比較エッジの位置と、前記記憶手段に記憶された前記特徴比パラメータの値と、に基づいて前記現在時刻における前記自車区画線の位置を推定するステップと、を実行させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、外界認識システム、車両制御装置、走行路認識方法、及びプログラムに関する。より詳しくは、自車両の前方画像に基づいて走行路を認識する外界認識システム、車両制御装置、走行路認識方法、及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて予防安全技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。
【0003】
例えば特許文献1には、車載カメラによって得られた自車両の前方の画像に基づいて自車両の走行路を区画する白線や路端等(以下、「自車区画線」ともいう)等を認識する予防安全技術が記載されている。このように画像に基づいて自車区画線を認識する場合、路端の途切れ、逆光、白線のかすれ、及び水溜まり等の異物の存在等の様々な要因によって認識精度が低下するおそれがある。これに対し特許文献1に記載の技術では、撮像部により取得された画像に含まれる線状部位の方向と、撮像部により取得された画像もしくは距離検出部により検出された距離情報に基づいて生成された三次元的な距離情報を含む距離画像に含まれる面領域の端部の方向とに基づいて、走行路の方向を推定する。
【先行技術文献】
【特許文献】
【0004】
特開2016-099650号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで特許文献1に記載の技術は、本来であれば存在するはずの自車区画線の一部が、上述のように逆光やかすれ等の理由によって適切に認識できない場合に有用である。しかしながら、例えば交差点の中央等のようにそもそも自車区画線が存在していないところでは、特許文献1に記載の技術によって自車区画線を認識することができない。すなわち特許文献1に記載の技術では、車載カメラによって取得された画像内に自車区画線が一切映っていない場合には、自車区画線を認識することができない。
【0006】
本発明は、前方画像に自車区画線が映っていない場合であっても、その存在を認識することができる外界認識システム、車両制御装置、走行路認識方法、及びプログラムを提供することを目的とし、ひいては持続可能な輸送システムの発展に寄与することを目的とする。
【課題を解決するための手段】
【0007】
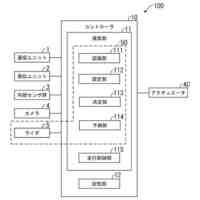
(1)本発明に係る外界認識システムは、自車両から視て前方側の画像を前方画像として取得する前方画像取得手段と、前記前方画像に基づいて前記自車両の走行路を認識する走行路認識手段と、を備えるものであって、前記走行路認識手段は、前記前方画像に対しセグメンテーション処理を施すことにより、当該前方画像の被写体を、前記走行路を区画する自車区画線を含む複数のクラスに分類するとともに、前記クラスのエッジを抽出したエッジ画像を生成する分類手段と、前記エッジ画像の中から、前記自車区画線のエッジである自車区画線エッジと、前記前方画像取得手段の視野を平面視した場合に前記自車区画線エッジに対し平行な複数の平行エッジと、を前記クラス毎に抽出するとともに、複数の前記平行エッジの中から1つを基準エッジとして選択する平行エッジ抽出手段と、複数の前記平行エッジのうち前記基準エッジ以外を比較エッジとし、前記エッジ画像において幅方向に沿って延びる横基準線に沿った前記基準エッジ及び前記比較エッジ間の第1距離と前記基準エッジ及び前記自車区画線エッジ間の第2距離との特徴比と相関のある特徴比パラメータの値を算出する特徴比パラメータ算出手段と、現在時刻より過去の時刻において前記特徴比パラメータ算出手段によって算出された前記特徴比パラメータの値を記憶する記憶手段と、前記現在時刻における前記基準エッジ及び前記比較エッジの位置と、前記記憶手段に記憶された前記特徴比パラメータの値と、に基づいて前記現在時刻における前記自車区画線の位置を推定する自車区画線推定手段と、を備えることを特徴とする。
【0008】
(2)この場合、前記平行エッジ抽出手段は、前記エッジ画像において共通の消失点を中心とした消失範囲へ向けて延びるエッジを前記平行エッジとして抽出することが好ましい。
【0009】
(3)この場合、前記平行エッジ抽出手段は、前記横基準線と平行な1以上の区分線によって、前記エッジ画像に存在するエッジを複数のエッジ線分に仮想的に分割し、前記エッジ画像に含まれる複数のエッジのうち、前記区分線によって仮想的に区画される分割区画毎に定められた前記消失範囲に向けて延びる前記エッジ線分を複数有するものを前記平行エッジとして抽出することが好ましい。
【0010】
(4)この場合、前記特徴比パラメータ算出手段は、前記特徴比パラメータの値を前記分割区画毎に算出し、前記記憶手段は、前記特徴比パラメータ算出手段によって算出された前記特徴比パラメータの値を前記分割区画毎に記憶し、前記自車区画線推定手段は、前記現在時刻における前記自車区画線の位置を、前記記憶手段において前記分割区画毎に記憶された前記特徴比パラメータの値に基づいて、前記分割区画毎に推定することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
13日前
本田技研工業株式会社
ロボット
11日前
本田技研工業株式会社
搬送装置
1か月前
本田技研工業株式会社
回転機械
12日前
本田技研工業株式会社
触媒インク
13日前
本田技研工業株式会社
触媒インク
13日前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
電力変換装置
20日前
本田技研工業株式会社
管理システム
20日前
本田技研工業株式会社
鞍乗り型車両
17日前
本田技研工業株式会社
物体検出装置
23日前
本田技研工業株式会社
電力変換装置
24日前
本田技研工業株式会社
車両制御装置
19日前
本田技研工業株式会社
位置推定装置
19日前
本田技研工業株式会社
作業システム
12日前
本田技研工業株式会社
鞍乗り型車両
12日前
本田技研工業株式会社
鞍乗り型車両
12日前
本田技研工業株式会社
電力変換装置
24日前
本田技研工業株式会社
電流検出装置
25日前
本田技研工業株式会社
電流検出装置
25日前
本田技研工業株式会社
導体接合方法
19日前
本田技研工業株式会社
クラッチ装置
4日前
本田技研工業株式会社
動力伝達装置
10日前
本田技研工業株式会社
ガス回収装置
1か月前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
外界認識装置
27日前
本田技研工業株式会社
鞍乗り型車両
3日前
本田技研工業株式会社
物体検出装置
25日前
本田技研工業株式会社
薄板搬送装置
26日前
本田技研工業株式会社
水電解システム
19日前
本田技研工業株式会社
水電解システム
13日前
本田技研工業株式会社
水電解システム
9日前
本田技研工業株式会社
リーク検出装置
25日前
本田技研工業株式会社
非接触受電装置
11日前
本田技研工業株式会社
電気化学スタック
4日前
本田技研工業株式会社
形状計測システム
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ