TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128882
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025864
出願日
2024-02-22
発明の名称
ロボット
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B63G
8/14 20060101AFI20250827BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】適正な姿勢制御を実行することができるロボットを提供する。
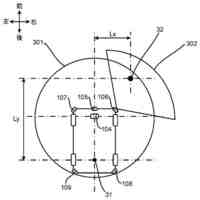
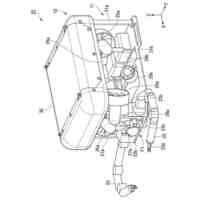
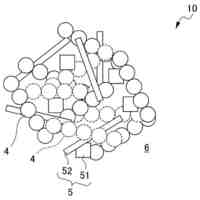
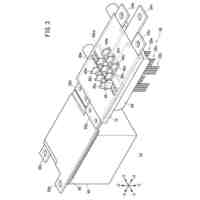
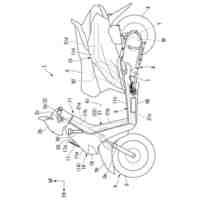
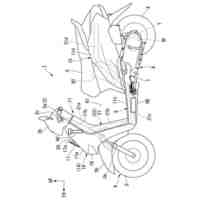
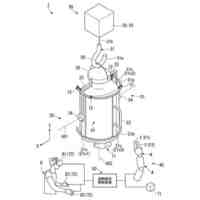
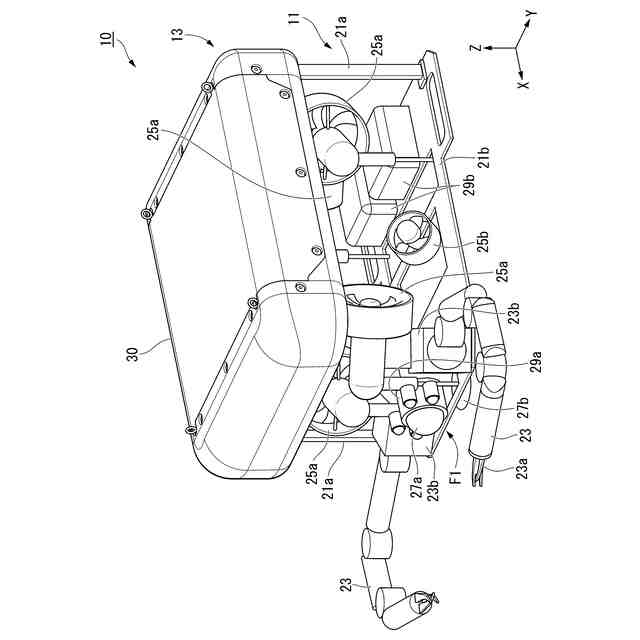
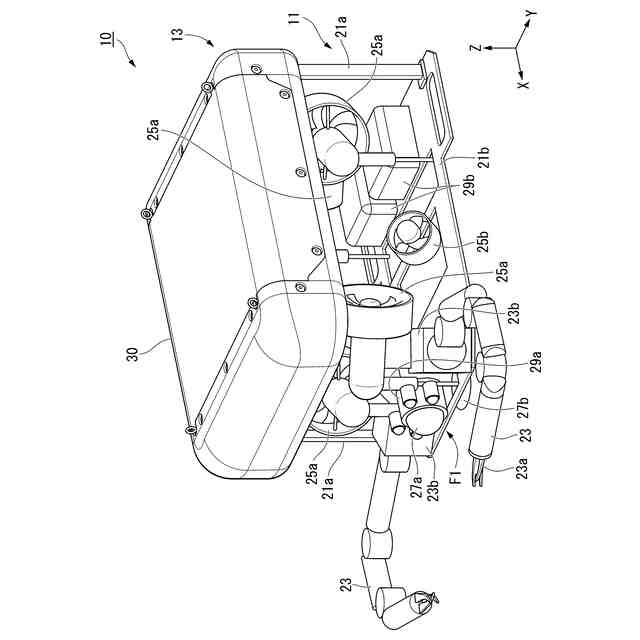
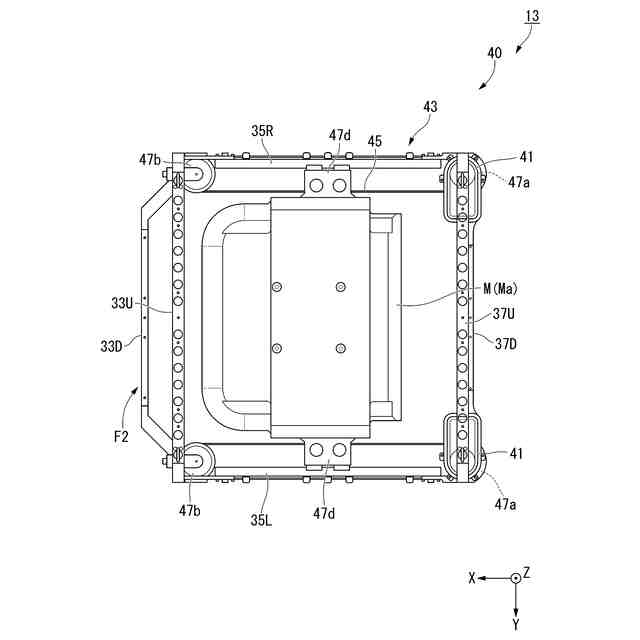
【解決手段】ロボット10は、互いに連結される第1部位11及び第2部位13を備える。第2部位13は、ロボット10の全体での浮心及び重心の少なくともいずれかを変更するために移動させられる移動部材と、移動部材を二次元の並進運動によって移動させる駆動部とを備える。駆動部は、移動部材を移動させるための動力を出力するとともに第1部位11に固定される動力源を備える。
【選択図】図1
特許請求の範囲
【請求項1】
互いに連結される第1部位及び第2部位を備え、
前記第2部位は、
前記第1部位及び前記第2部位の全体での浮心及び重心の少なくともいずれかを変更するために移動させられる移動部材と、
前記移動部材を二次元の並進運動によって移動させる駆動部と
を備え、
前記駆動部は、
前記移動部材を移動させるための動力を出力するとともに前記第1部位に固定される動力源を備える
ロボット。
続きを表示(約 580 文字)
【請求項2】
前記移動部材は、浮力を発生させる浮力部材を備える
請求項1に記載のロボット。
【請求項3】
前記第2部位は、
前記移動部材及び前記駆動部の全体を覆うカバー部材を備える
請求項2に記載のロボット。
【請求項4】
前記駆動部は、
前記動力源から出力される動力を前記移動部材に伝達する伝達機構を備え、
前記伝達機構は、
互いに平行に配置される第1経路部及び第2経路部と前記第1経路部及び前記第2経路部の各々に直交して接続される第3経路部とを有するH字型の周回経路を形成するように配置される環状部材と、
前記第1経路部及び前記第2経路部の各々の両端に固定されて、前記環状部材が装着される2組の駆動プーリ及び従動プーリと、
前記第1経路部及び前記第2経路部の各々と前記第3経路部との間で前記環状部材が装着されて、前記第1経路部及び前記第2経路部の各々に沿って移動する4つのベンドプーリと、
前記第3経路部で前記環状部材の単一部位に固定されて、前記移動部材を支持するとともに、前記第1経路部及び前記第2経路部の各々又は前記第3経路部に沿って移動する支持部材と
を備える
請求項1から請求項3のいずれか1項に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、例えば、リンク機構等によって駆動されるフロートを備えることによって、ピッチ角及びロール角等の姿勢を制御する水中ロボットが知られている(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
Norimitsu Sakagami,Mizuho Shibata,Tomohiro Ueda,Kensei Ishizu,Kenshiro Yokoi,and Sadao Kawamura,“Numerical and Experimental Analysis of Portable Underwater Robots with a Movable Float Device”,Journal of Robotics and Mechatronics Vol.33 No.6,2021
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述した従来技術のように、姿勢制御のためのフロートを備える水中ロボットでは、作業環境にかかわらず、適正な姿勢制御を実現することが望まれている。しかしながら、例えば、潮流が大きい又は障害物が多い等の悪条件の環境下では、潮流の外力に逆らってフロートを駆動することができない、又は、障害物にフロートが接触する等によって、適正な姿勢制御の実行が困難になるおそれがある。
また、従来、例えばフロート等の移動部材を、二次元の並進運動によって移動させる機構として、2つの独立した動力源を備える動力伝達機構が知られている。このような動力伝達機構を搭載する水中ロボットでは、例えば各動力源が移動部材とともに移動する構成の場合、浮心及び重心が変動し易くなり、適正な姿勢制御の実行が困難になるおそれがある。
例えば姿勢制御でフロートを移動させる状態で重量物である動力源が移動する場合、大きな浮力が必要であり、浮心と共に重心が変動し易くなるおそれがある。また、例えば姿勢制御でカウンターウェイトのような重りを移動させる状態でフロートになる動力源が移動する場合、大きな重りが必要であり、重心と共に浮心が変動し易くなるおそれがある。
【0005】
本発明は、適正な姿勢制御を実行することができるロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決して係る目的を達成するために、本発明は以下の態様を採用した。
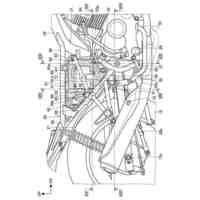
(1):本発明の一態様に係るロボット(例えば、実施形態でのロボット10)は、互いに連結される第1部位(例えば、実施形態での第1部位11)及び第2部位(例えば、実施形態での第2部位13)を備え、前記第2部位は、前記第1部位及び前記第2部位の全体での浮心及び重心の少なくともいずれかを変更するために移動させられる移動部材(例えば、実施形態での移動部材M)と、前記移動部材を二次元の並進運動によって移動させる駆動部(例えば、実施形態での駆動部40)とを備え、前記駆動部は、前記移動部材を移動させるための動力を出力するとともに前記第1部位に固定される動力源(例えば、実施形態での動力源41)を備える。
【0007】
(2):上記(1)に記載のロボットでは、前記移動部材は、浮力を発生させる浮力部材(例えば、実施形態での浮力部材Ma)を備えてもよい。
【0008】
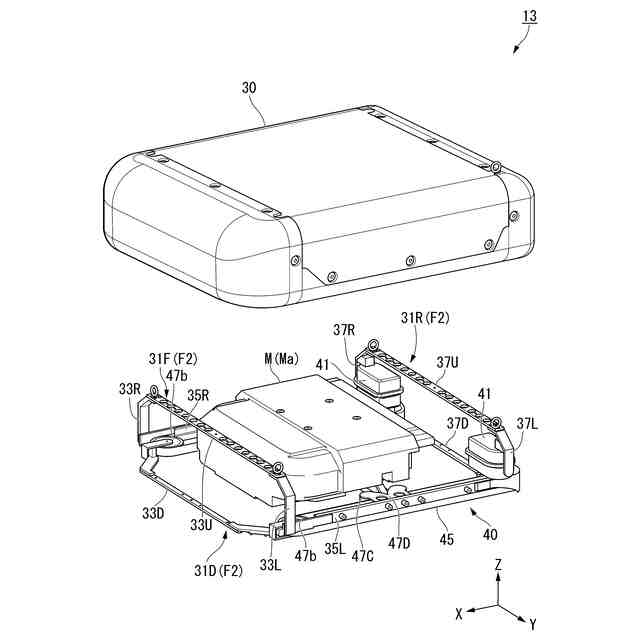
(3):上記(2)に記載のロボットでは、前記第2部位は、前記移動部材及び前記駆動部の全体を覆うカバー部材(例えば、実施形態でのカバー部材30)を備えてもよい。
【0009】
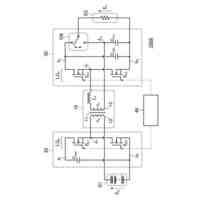
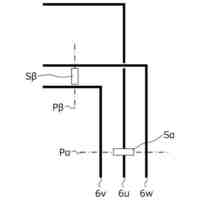
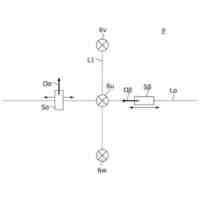
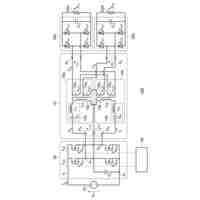
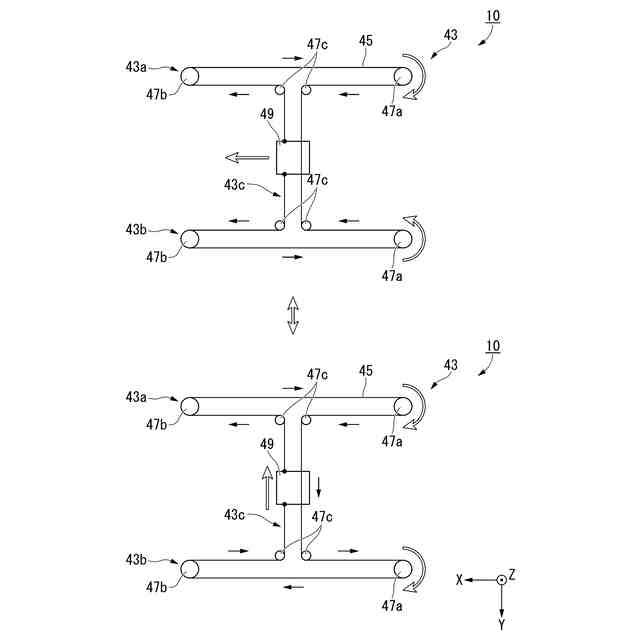
(4):上記(1)から(3)のいずれか1つに記載のロボットでは、前記駆動部は、前記動力源から出力される動力を前記移動部材に伝達する伝達機構(例えば、実施形態での伝達機構43)を備え、前記伝達機構は、互いに平行に配置される第1経路部(例えば、実施形態での第1経路部43a)及び第2経路部(例えば、実施形態での第2経路部43b)と前記第1経路部及び前記第2経路部の各々に直交して接続される第3経路部(例えば、実施形態での第3経路部43c)とを有するH字型の周回経路を形成するように配置される環状部材(例えば、実施形態での環状部材45)と、前記第1経路部及び前記第2経路部の各々の両端に固定されて、前記環状部材が装着される2組の駆動プーリ(例えば、実施形態での駆動プーリ47a)及び従動プーリ(例えば、実施形態での従動プーリ47b)と、前記第1経路部及び前記第2経路部の各々と前記第3経路部との間で前記環状部材が装着されて、前記第1経路部及び前記第2経路部の各々に沿って移動する4つのベンドプーリ(例えば、実施形態でのベンドプーリ47c)と、前記第3経路部で前記環状部材の単一部位に固定されて、前記移動部材を支持するとともに、前記第1経路部及び前記第2経路部の各々又は前記第3経路部に沿って移動する支持部材(例えば、実施形態での支持部材49)とを備えてもよい。
【発明の効果】
【0010】
上記(1)によれば、動力源は固定されているので、例えば動力源に接続される信号線及び電力線の移動のために必要とされるスペースの確保が不要であり、浮心及び重心の制御容易性のために移動部材を大型化することができる。また、動力源が移動部材とともに移動しないことにより、浮心及び重心の変動を抑制することができ、浮心及び重心の制御容易性を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
2日前
本田技研工業株式会社
板ばね
27日前
本田技研工業株式会社
収納部
21日前
本田技研工業株式会社
ロボット
27日前
本田技研工業株式会社
搬送装置
19日前
本田技研工業株式会社
回転機械
1日前
本田技研工業株式会社
ロボット
今日
本田技研工業株式会社
積層装置
26日前
本田技研工業株式会社
触媒インク
2日前
本田技研工業株式会社
鞍乗型車両
20日前
本田技研工業株式会社
触媒インク
2日前
本田技研工業株式会社
位置決め装置
26日前
本田技研工業株式会社
物体検出装置
14日前
本田技研工業株式会社
電力変換装置
13日前
本田技研工業株式会社
鞍乗り型車両
6日前
本田技研工業株式会社
鞍乗り型車両
22日前
本田技研工業株式会社
情報提供装置
28日前
本田技研工業株式会社
電流検出装置
14日前
本田技研工業株式会社
電流検出装置
14日前
本田技研工業株式会社
電力変換装置
13日前
本田技研工業株式会社
導体接合方法
8日前
本田技研工業株式会社
薄板搬送装置
15日前
本田技研工業株式会社
情報提供装置
28日前
本田技研工業株式会社
位置推定装置
8日前
本田技研工業株式会社
鞍乗り型車両
1日前
本田技研工業株式会社
管理システム
9日前
本田技研工業株式会社
鞍乗り型車両
22日前
本田技研工業株式会社
ガス回収装置
20日前
本田技研工業株式会社
鞍乗り型車両
1日前
本田技研工業株式会社
作業システム
1日前
本田技研工業株式会社
電力変換装置
9日前
本田技研工業株式会社
物体検出装置
12日前
本田技研工業株式会社
車両制御装置
8日前
本田技研工業株式会社
外界認識装置
16日前
本田技研工業株式会社
水電解システム
2日前
本田技研工業株式会社
リーク検出装置
14日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ