TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129287
公報種別
公開特許公報(A)
公開日
2025-09-04
出願番号
2025111979,2022561262
出願日
2025-07-02,2021-03-15
発明の名称
異物除去方法
出願人
株式会社FUJI
代理人
弁理士法人アイテック国際特許事務所
主分類
B07C
5/36 20060101AFI20250828BHJP(固体相互の分離;仕分け)
要約
【課題】異物除去システムにおいて、異物を正確に除去できるようにする。
【解決手段】本開示の異物除去システムは、対象物と異物とが混合した廃材を搬送する搬送装置と、廃材に含まれる異物を検出する検出モジュールと、検出モジュールよりも搬送装置の搬送方向の下流側に設けられ、検出モジュールで検出された異物を前記廃材から除去する異物除去モジュールと、を備えたものである。
【選択図】図2
特許請求の範囲
【請求項1】
対象物と異物とが混合した廃材を搬送する搬送装置と、
前記廃材に含まれる前記異物を検出する検出モジュールと、
前記検出モジュールよりも前記搬送装置の搬送方向の下流側に設けられ、前記検出モジュールで検出された前記異物を前記廃材から除去する異物除去モジュールと、
を備えた異物除去システム。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の異物除去システムであって、
前記搬送装置と隣接するように配置され、前記異物を貯留する異物貯留部材と、
前記搬送装置の上方に配置され、前記異物除去モジュールによって前記廃材から除去された前記異物を前記異物貯留部材まで搬送して廃棄するサブ搬送装置と、
を備えた異物除去システム。
【請求項3】
請求項2に記載の異物除去システムであって、
前記異物除去モジュールに設けられ、前記異物を前記廃材から採取可能な採取部材と、
前記サブ搬送装置を前記異物除去モジュールに対して接近又は離間させるサブ搬送装置移動部と、
前記採取部材が前記異物を前記廃材から採取している間、前記サブ搬送装置が前記採取部材の近くの待機位置で待機するように前記サブ搬送装置移動部を制御する待機位置制御を実行する制御装置と、
を備えた異物除去システム。
【請求項4】
前記制御装置は、前記待機位置制御を実行するにあたり、前記サブ搬送装置の前記待機位置を前記検出モジュールによって検出された前記異物の大きさ及び形状の少なくとも一方に基づいて設定する、
請求項3に記載の異物除去システム。
【請求項5】
前記制御装置は、前記異物除去モジュールの前記採取部材が前記異物を直接前記異物貯留部材に廃棄する廃棄動作及び前記異物除去モジュールの前記採取部材が前記異物を前記サブ搬送装置に載置する載置動作のうち必要な時間が短い動作を選択し、選択した動作を前記異物除去モジュールが実行するように制御する、
請求項3又は4に記載の異物除去システム。
【請求項6】
前記異物貯留部材は、前記搬送装置の両側に前記搬送方向に沿って設けられ、
前記サブ搬送装置は、中心側から外側に向かって前記異物を搬送する、
請求項2~5のいずれか1項に記載の異物除去システム。
【請求項7】
請求項1に記載の異物除去システムであって、
前記検出モジュール及び前記異物除去モジュールを含む群より選ばれる1つのモジュールを、共通したクランプ機構で保持可能なベースと、
前記搬送装置の前記搬送方向に沿って前記ベースが複数配置され、前記検出モジュールを保持する前記ベースが上流側、前記異物除去モジュールを保持する前記ベースが下流側になるように配置された廃材処理ラインと、
を備えた異物除去システム。
【請求項8】
前記廃材処理ラインには、前記モジュールを保持していない前記ベースが配置されている、
請求項7に記載の異物除去システム。
【請求項9】
請求項7又は8に記載の異物除去システムであって、
前記搬送装置は、
前記廃材を第1搬送方向に搬送する第1搬送部と、
前記第1搬送方向の所定の分岐点に接続され、前記廃材を前記第1搬送方向から枝分かれした第2搬送方向へ搬送する第2搬送部と、
前記分岐点に設けられ、前記廃材を前記第1搬送方向へ搬送するか前記第2搬送方向へ搬送するかを切り替える切替部と、
を備え、
前記検出モジュールを保持する前記ベースは、前記第1搬送方向のうち前記分岐点よりも上流側に設けられ、
前記異物除去モジュールを保持する前記ベースは、前記第2搬送方向のうち前記分岐点よりも下流側に設けられ、
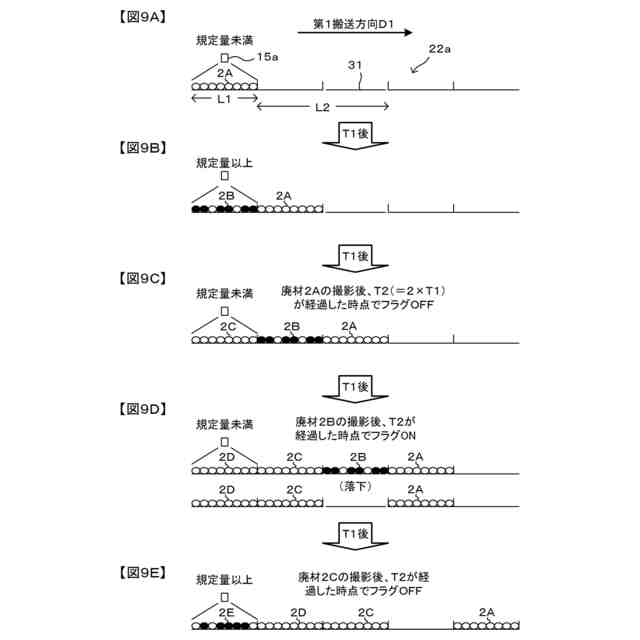
前記検出モジュールが検出した前記異物の量が予め定めた規定量を超えなければ、前記切替部を制御して前記廃材が前記第1搬送部で搬送されるようにし、前記規定量を超えたならば、前記切替部を制御して、前記第2搬送部で前記廃材が搬送されるようにする制御装置
を備えた異物除去システム。
【請求項10】
前記制御装置は、前記検出モジュールが前記異物を検出した時点から前記検出モジュールで検出した前記異物が前記切替部に到達するまでの到達時間を算出し、前記異物の量が前記規定量を超えなければ、前記異物を検出した時点から前記到達時間が経過した際に、前記切替部を制御して前記廃材が前記第1搬送部で搬送されるようにし、前記異物の量が前記規定量を超えたならば、前記異物を検出した時点から前記到達時間が経過した際に、前記切替部を制御して前記廃材が前記第2搬送部で搬送されるようする、
請求項9に記載の異物除去システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書は、異物除去システムを開示する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、搬送装置を利用して対象物を搬送方向に搬送しつつ、対象物に対して所定の作業を行うロボットシステムが知られている。例えば、非特許文献1~4には、対象物と異物とが混ざった混合物をコンベアで搬送して、ピッキングロボットを利用してコンベアから異物を除去する異物除去システムが開示されている。
【先行技術文献】
【非特許文献】
【0003】
SamurAI Machinex Sorting Robot - Lakeshore Recycling Systems[令和2年10月5日検索]、インターネット<URL:https://www.youtube.com/watch?v=2OY80BwaJH8&feature=emb_logo>
Waste Robotics Sorting-as-a-Service (SaaS) introduction[令和2年10月5日検索]、インターネット<URL:https://www.youtube.com/watch?v=9rA8NpURkLQ>
ZenRobotics in action[令和2年10月5日検索]、インターネット<URL:https://www.youtube.com/watch?v=EfTLyZuujFM>
ABB AI-assisted trash sorting[令和2年10月5日検索]、インターネット<URL:https://www.youtube.com/watch?v=SVHVMVuhXjA>
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、このような異物除去システムでは、ピッキングロボットで異物を正確に除去するために、搬送装置で搬送される混合物に含まれる対象物と異物とを正確に区別することが求められている。
【0005】
本開示はこのような課題を解決するためになされたものであり、異物除去システムにおいて、異物を正確に除去できるようにすることを主目的とする。
【課題を解決するための手段】
【0006】
本開示の異物除去システムは、
対象物と異物とが混合した廃材を搬送する搬送装置と、
前記廃材に含まれる前記異物を検出する検出モジュールと、
前記検出モジュールよりも前記搬送装置の搬送方向の下流側に設けられ、前記検出モジュールで検出された前記異物を前記廃材から除去する異物除去モジュールと、
を備えたものである。
【0007】
この異物除去システムでは、異物除去モジュールよりも搬送装置の搬送方向の上流側に設けられた検出モジュールにより廃材に含まれる異物を検出する。したがって、廃材から異物を正確に除去することができる。
【図面の簡単な説明】
【0008】
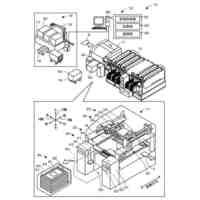
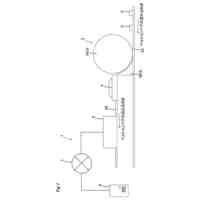
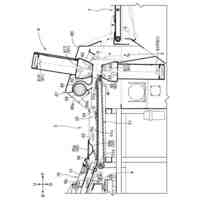
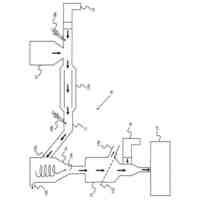
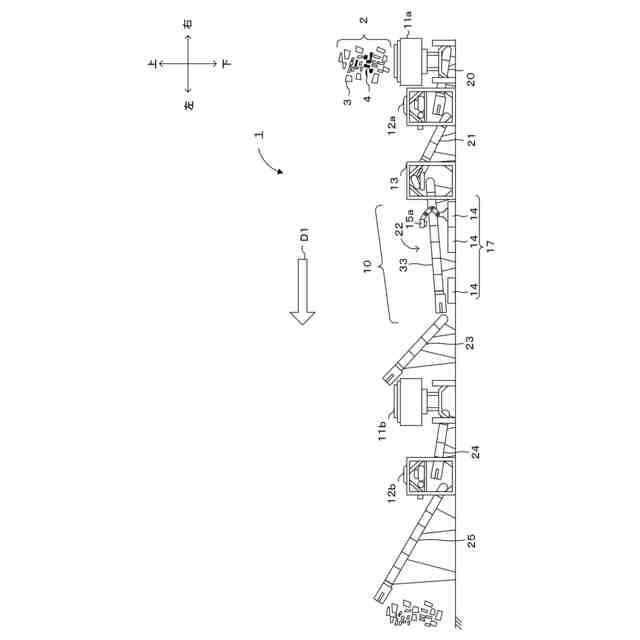
リサイクルシステム1の構成を示す説明図。
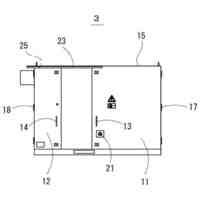
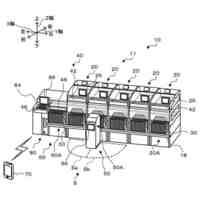
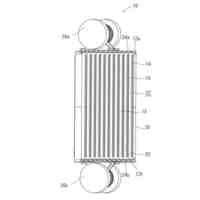
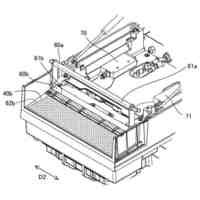
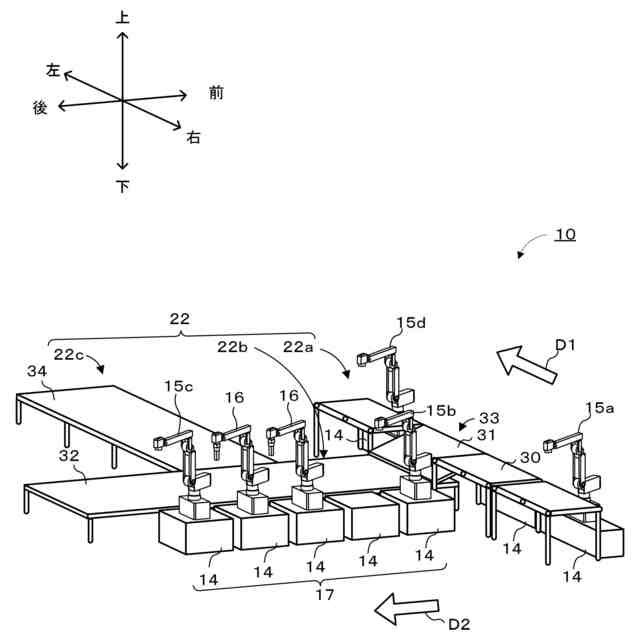
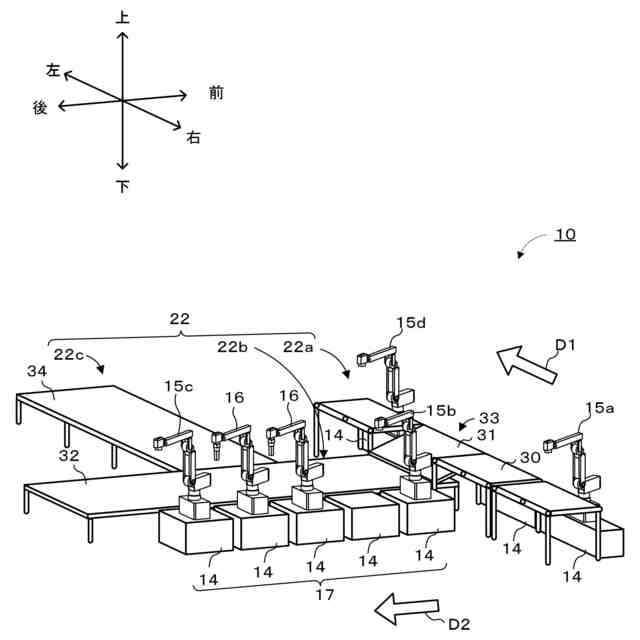
異物除去システム10の概略構成を示す斜視図。
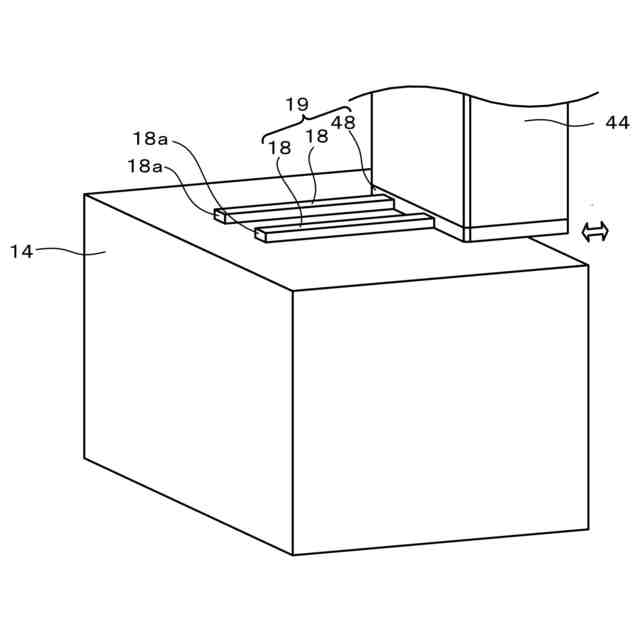
クランプ機構19の概略構成を示す斜視図。
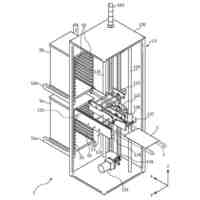
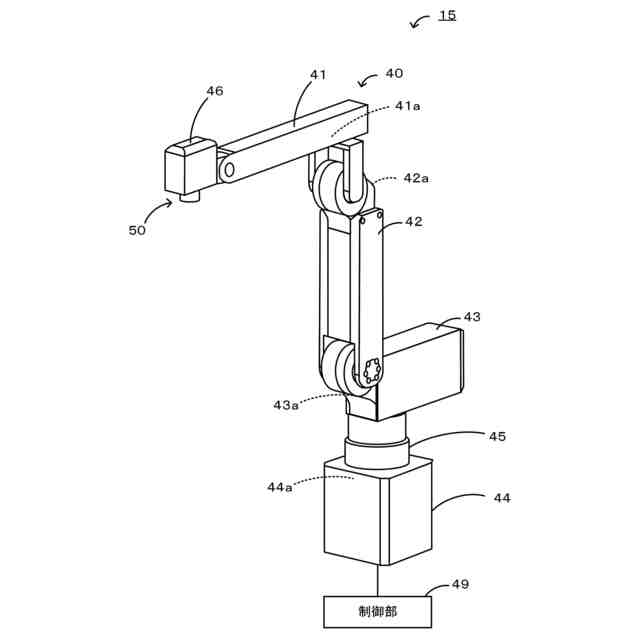
撮影モジュール15の概略構成を示す斜視図。
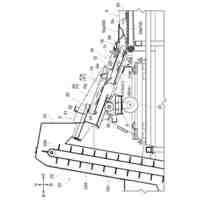
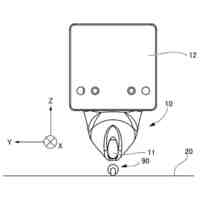
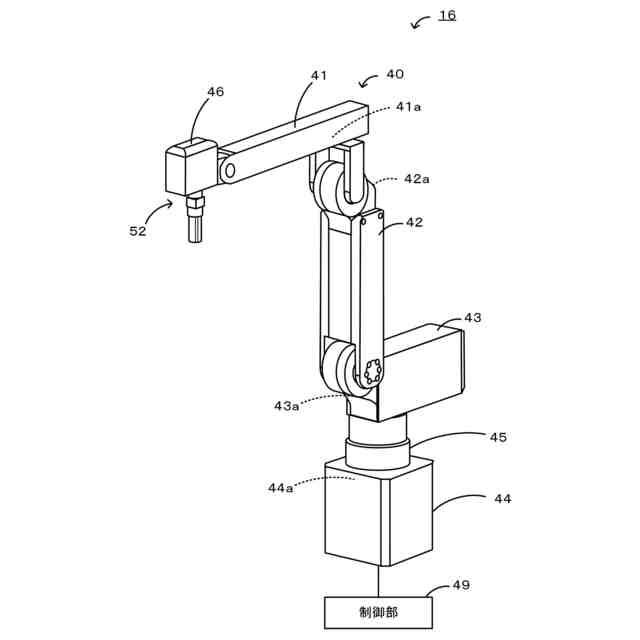
ピッキングモジュール16の概略構成を示す斜視図。
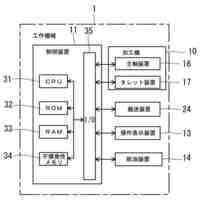
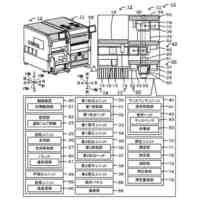
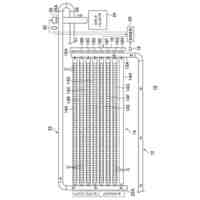
異物除去システム10の電気的な接続関係を示すブロック図。
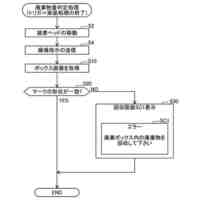
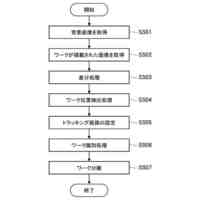
フラグ設定ルーチンの一例を示すフローチャート。
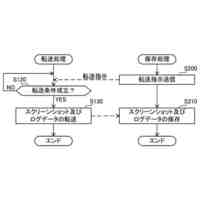
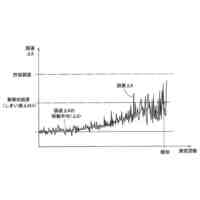
搬送方向切替ルーチンの一例を示すフローチャート。
搬送方向切替ルーチンを実行したときの一例を時系列的に示した説明図。
異物除去システム110の構成を示す斜視図。
異物除去システム210の構成を示す斜視図。
異物除去システム310の構成を示す斜視図。
リサイクルシステム401の構成を示す説明図。
異物除去システム410の概略構成を示す斜視図。
異物除去システム410の概略構成を示す側面図。
異物除去システム410の概略構成を示す平面図。
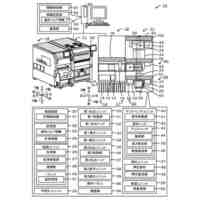
異物除去システム410の電気的な接続関係を示すブロック図。
異物除去システム410で異物4を除去する様子の一例を示す説明図。
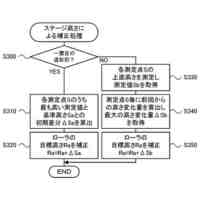
異物廃棄処理ルーチンの一例を示すフローチャート。
動作選択の様子の一例を示す説明図。
【発明を実施するための形態】
【0009】
[第1実施形態]
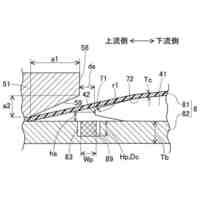
次に、本開示を実施するための形態について図面を参照しながら説明する。図1はリサイクルシステム1の構成を示す説明図、図2は異物除去システム10の概略構成を示す斜視図、図3はクランプ機構19の概略構成を示す斜視図、図4は撮影モジュール15の概略構成を示す斜視図、図5はピッキングモジュール16の概略構成を示す斜視図、図6は異物除去システム10の電気的な接続関係を示すブロック図である。なお、本実施形態において、左右方向、前後方向及び上下方向は、図1及び図2に示した通りとする(図1では前後方向は紙面に垂直方向)。また、本実施形態において、廃材2を第1搬送部22aで搬送する方向を第1搬送方向D1、第2搬送部22bで搬送する方向を第2搬送方向D2と称するものとする。
【0010】
リサイクルシステム1で処理される廃材2は、石、砂及びコンクリート等のリサイクルの対象となる対象物3と、紙、樹脂、木材及び金属等の異物4とが混合した混合物である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社FUJI
制御盤
29日前
株式会社FUJI
工作機械
18日前
株式会社FUJI
工作機械
25日前
株式会社FUJI
部品実装機
21日前
株式会社FUJI
対基板作業機
1か月前
株式会社FUJI
測定値処理装置
29日前
株式会社FUJI
フィーダ制御装置
29日前
株式会社FUJI
造形装置および造形方法
6日前
株式会社FUJI
製造方法及び3次元造形システム
11日前
株式会社FUJI
印刷装置及び印刷装置の制御方法
29日前
株式会社FUJI
テープ剥離装置およびテープフィーダ
29日前
株式会社FUJI
造形装置およびディスペンサヘッドの制御方法
14日前
株式会社FUJI
アラーム情報表示装置、及びアラーム情報表示システム
21日前
株式会社FUJI
サイクルタイム表示装置、及びサイクルタイム表示システム
21日前
株式会社FUJI
実装システム
1か月前
株式会社FUJI
対基板作業機、および雄型コネクタと雌型コネクタとの接続維持方法
14日前
株式会社FUJI
交換可能部材の交換方法及び印刷システム
11日前
日清製粉株式会社
篩
3か月前
個人
ゴミ分別システム
2か月前
株式会社タケエイ
振動篩装置
3か月前
株式会社レクザム
基板アンローダ
4か月前
株式会社クボタ
豆類選別機
14日前
株式会社クボタ
豆類選別機
14日前
株式会社クボタ
豆類選別機
14日前
川崎重工業株式会社
廃棄物処理システム
11日前
シブヤ精機株式会社
農産物の集出荷装置
18日前
コネクテッドロボティクス株式会社
処理方法
2か月前
キヤノン株式会社
分別装置及び分別方法
3か月前
株式会社栗本鐵工所
ローラスクリーン
14日前
株式会社クボタ
豆類選別機
14日前
株式会社クボタ
豆類選別機
14日前
株式会社サタケ
測定装置および選別装置
18日前
株式会社シンセイ
砂乾燥選別装置
3か月前
株式会社クボタ
豆類選別機
14日前
日本協同企画株式会社
果菜引継ぎ搬送装置及び果菜箱詰め装置
2か月前
株式会社 東京ウエルズ
ワーク分類装置、ワーク分類方法
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ