TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129941
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026931
出願日
2024-02-26
発明の名称
エンドエフェクタ及びワーク研磨方法
出願人
茶屋テクノロジー株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
17/02 20060101AFI20250829BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】
ロボットアームに対する研磨部の相対的な変位を許容するだけでなく、その変位量が変化しても、研磨部を一定の押圧力でワークに押し当てることができ、研磨ムラの発生を抑えることができるエンドエフェクタを提供する。
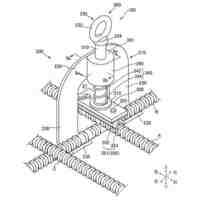
【解決手段】
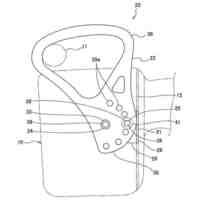
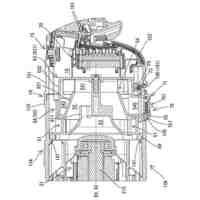
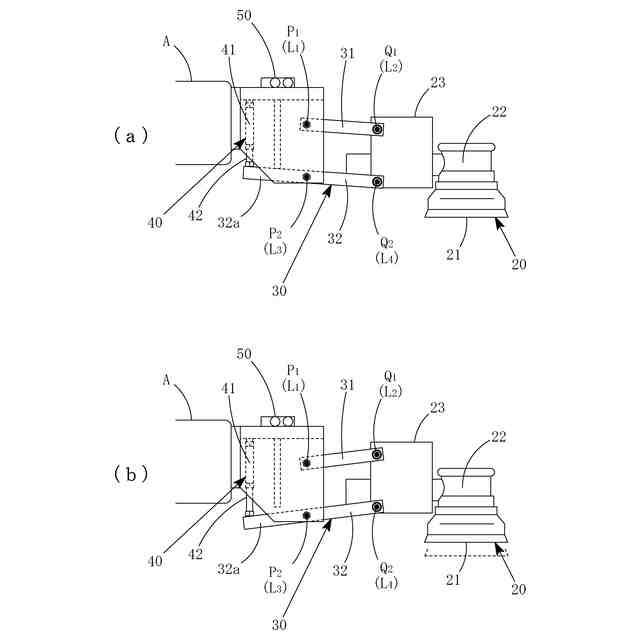
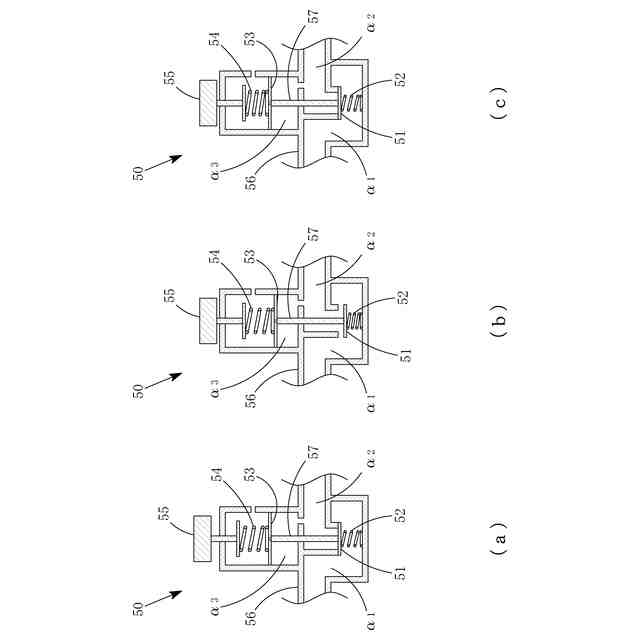
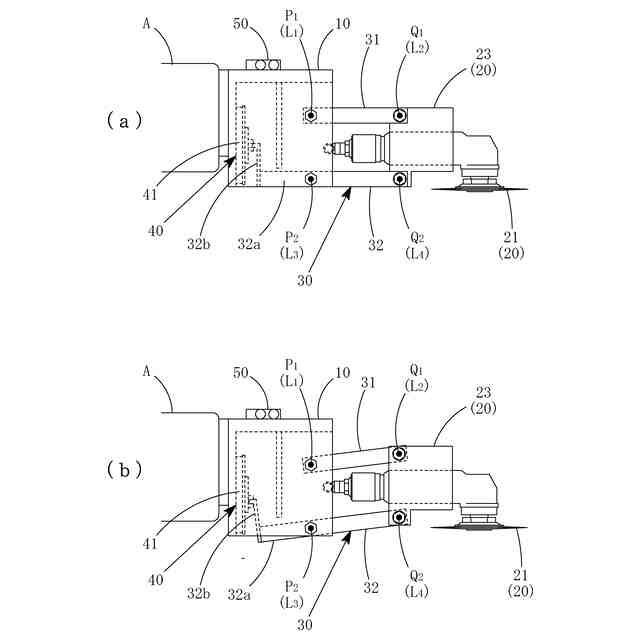
ロボットアームの先端部に固定するためのベース部10と、ワークを研磨するための研磨部20とを備えたエンドエフェクタにおいて、ベース部10と研磨部20との間に介在され、ベース部10に対する研磨部20の平行移動を許容した状態で、ベース部10に対して研磨部20を支持するリンク機構30と、ベース部10とリンク機構30との間に介在され、研磨部20を変位位置から初期位置に移動させる向きにリンク機構30を付勢するエアシリンダ40と、エアシリンダ40による付勢力を略一定に保つエアレギュレータ50とを設けた。
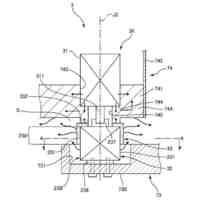
【選択図】 図4
特許請求の範囲
【請求項1】
ロボットアームの先端部に固定するためのベース部と、
ワークを研磨するための研磨部と
を備えたエンドエフェクタであって、
ベース部と研磨部との間に介在され、ベース部に対する研磨部の平行移動を許容した状態で、ベース部に対して研磨部を支持するリンク機構と、
ベース部とリンク機構との間に介在され、研磨部を変位位置から初期位置に移動させる向きにリンク機構を付勢するエアシリンダと、
エアシリンダによる付勢力を略一定に保つエアレギュレータと
が設けられたことを特徴とするエンドエフェクタ。
続きを表示(約 490 文字)
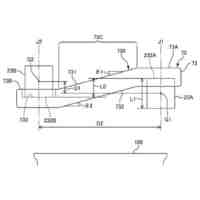
【請求項2】
リンク機構が、
基端側をベース部の上部における点P
1
に軸支され、先端側を研磨部の上部における点Q
1
に軸支された第一リンク節と、
第一リンク節に対して所定間隔を隔てて略平行に配され、基端側をベース部の下部における点P
2
に軸支され、先端側を研磨部の下部における点Q
2
に軸支された第二リンク節と、
で構成され、
第二リンク節における点P
2
よりもさらに基端側に延長部が設けられ、
エアシリンダの下端部を前記延長部に接続し、エアシリンダの上端部をベース部に接続することによって、エアシリンダが、前記延長部を上側に引っ張る向きに付勢する
請求項1記載のエンドエフェクタ。
【請求項3】
エアシリンダが、エアチャックタイプのものとされた請求項2記載のエンドエフェクタ。
【請求項4】
請求項1~3いずれか記載のエンドエフェクタをロボットアームの先端部に取り付けてワークを研磨するワーク研磨方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークを研磨するためにロボットアームの先端部に装着されるエンドエフェクタと、このエンドエフェクタを用いてワークを研磨するワーク研磨方法とに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
三次元的に複雑な形状を有するワークの表面を研磨する工程は、従来、手作業により行うことが多かったが、近年、ロボットアームを用いて行うことが増えてきている。研磨部を備えたエンドエフェクタを、ロボットアームの先端部に装着し、研磨部を駆動しながら、ロボットアームを三次元的に移動させ、研磨部をワークの表面に沿わせて移動させることによって、ワークの表面が研磨される。これにより、ワークの表面を研磨する工程を自動化して、製品の製造効率を高めることが可能になる。
【0003】
このようなエンドエフェクタにおける研磨部としては、特許文献1の図5に示されるように、回転砥石(同図における符号13)を備えたものが一般的である。回転砥石は、円盤状を為し、その中心線回りに回転可能な状態で軸支される。この回転砥石を回転させながら、その回転砥石における下面や端面等をワークに押し当てることによって、ワークの表面が研磨される。ワークの表面に起伏がある場合には、その起伏に応じて、ロボットアームを移動させ、回転砥石(研磨部)の位置や向きを変化させる。ロボットアームの移動経路は、ティーチング等によって、予めコンピュータにプログラムされている。
【先行技術文献】
【特許文献】
【0004】
特開2007-118132号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、研磨対象のワークの形態には、生産ロットの違い等に起因するバラつきがあることが一般的である。そのバラつきは、ワークの表面の微妙な凹凸等で現れることが多いところ、その微妙な凹凸等は、上記のプログラムには反映されていない。このため、ロボットアームをプログラムされた通りに移動させて研磨部でワークを研磨すると、ワークの表面には、研磨部が他よりも強く当たる箇所や、他よりも弱く当たる箇所が生じ得る。そのような箇所が生じると、ワークの表面には、研磨ムラが生じてしまう。したがって、ロボットアームを用いて研磨を行ったとしても、手作業による仕上工程を行う必要が生じる。
【0006】
このような実状に鑑みてか、これまでには、ロボットアームに対する研磨部の相対的な変位を許容するフローティング機構を設けることも行われている。フローティング機構としては、コイルスプリングを用いるものが知られている。例えば、前掲の特許文献1の図2では、ロボットアーム(同図における符号3)に固定される固定部(同図における符号5)と、回転砥石(同図における符号13)との間に、コイルスプリング(同図における符号7a,7b,8a,8b)を介在させている。これにより、ワークの表面の起伏に応じて、回転砥石(研磨部)を変位させることが可能になる。
【0007】
しかし、コイルスプリングを用いたフローティング機構では、研磨部からワークの表面に加えられる押圧力が均一にならない。というのも、コイルスプリングは、フックの法則が示すように、自然長からの縮み等が大きくなるにつれて、そのコイルスプリングに生じる反力(弾性力)が大きくなるため、起伏の具合によって、前記押圧力が変化するからである。このため、フローティング機構がない場合よりも、研磨ムラが改善するものの、それでも依然として研磨ムラが生ずるおそれがある。
【0008】
本発明は、上記課題を解決するために為されたものであり、ロボットアームに対する研磨部の相対的な変位を許容するだけでなく、その変位量が変化しても、研磨部を一定の押圧力でワークに押し当てることができ、研磨ムラの発生を抑えることができるエンドエフェクタを提供するものである。また、このエンドエフェクタをロボットアームの先端部に取り付けてワークを研磨するワーク研磨方法を提供することも本発明の目的である。
【課題を解決するための手段】
【0009】
上記課題は、
ロボットアームの先端部に固定するためのベース部と、
ワークを研磨するための研磨部と
を備えたエンドエフェクタであって、
ベース部と研磨部との間に介在され、ベース部に対する研磨部の平行移動を許容した状態で、ベース部に対して研磨部を支持するリンク機構と、
ベース部とリンク機構との間に介在され、研磨部を変位位置から初期位置に移動させる向きにリンク機構を付勢するエアシリンダと、
エアシリンダによる付勢力を略一定に保つエアレギュレータと
が設けられたことを特徴とするエンドエフェクタ
を提供することによって解決される。
【0010】
本発明のエンドエフェクタでは、リンク機構と、エアシリンダと、エアレギュレータとが、フローティング機構として機能するようになっている。エアシリンダは、従来のフローティング機構におけるコイルスプリングの代わりに設けたものであるところ、このエアシリンダによる付勢力は、エアレギュレータによって略均一に保たれるようになっている。すなわち、ロボットアームの先端部に固定されたベース部に対して研磨部が変位しても、研磨部からワークの表面に加えられる押圧力が略一定に保たれるようになっている。このため、ワークの表面に微妙な起伏がある場合でも、ワークの表面を均一に研磨して、研磨ムラの発生を抑えることができる。したがって、手作業による仕上工程を省き、製品の生産効率を向上することもできる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
25日前
個人
折りたたみ工具
8日前
株式会社三協システム
製函機
6日前
CKD株式会社
把持装置
7日前
株式会社三協システム
移載装置
5日前
株式会社不二越
ロボット操作装置
13日前
株式会社不二越
ロボットシステム
19日前
日本精工株式会社
締結用工具
22日前
SMC株式会社
着脱装置
6日前
株式会社ミクロブ
把持装置
7日前
太陽パーツ株式会社
アシストスーツ
8日前
ARMA株式会社
ジョイントフレーム
20日前
トヨタ自動車株式会社
カプラ接続治具
29日前
株式会社不二越
ロボットシステム
5日前
株式会社不二越
ロボットシステム
8日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
11日前
大和ハウス工業株式会社
ねじ回転工具
6日前
株式会社不二越
協働ロボットシステム
1か月前
ダイハツ工業株式会社
移載治具
20日前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
1か月前
セイコーエプソン株式会社
ロボット
25日前
セイコーエプソン株式会社
ロボット
6日前
セイコーエプソン株式会社
ロボット
19日前
セイコーエプソン株式会社
ロボット
15日前
コネクテッドロボティクス株式会社
保持システム
1か月前
シヤチハタ株式会社
マーキング装置
11日前
シヤチハタ株式会社
マーキング装置
11日前
北越メタル株式会社
鉄筋保持具
1か月前
株式会社マキタ
電動工具
6日前
株式会社マキタ
電動工具
6日前
川崎重工業株式会社
作業設備
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
タイガー産業株式会社
アタッチメント
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ