TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025131008
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028467
出願日
2024-02-28
発明の名称
制御装置、制御方法、及び、制御プログラム
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
H02J
50/90 20160101AFI20250902BHJP(電力の発電,変換,配電)
要約
【課題】受電側で要求する電力を出力できる可能性を高める制御装置、制御方法、制御プログラムを提供する。
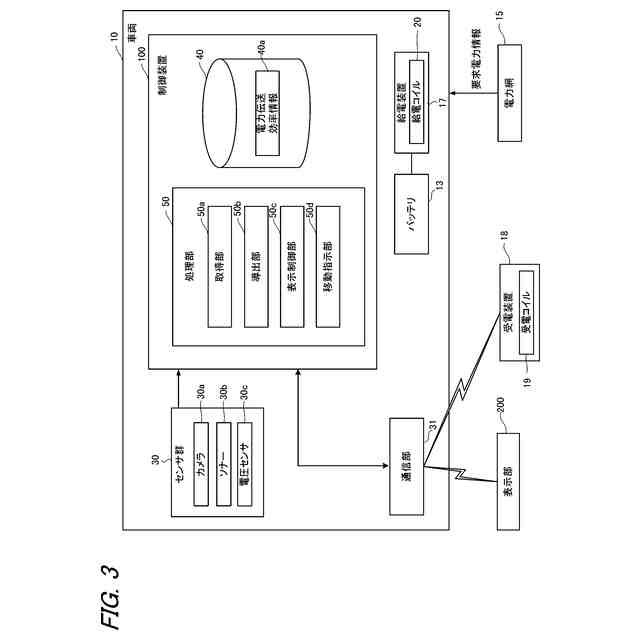
【解決手段】制御装置100は、受電装置18を介して電力網15に供給する電力の目標値である要求電力を示す要求電力情報を取得する取得部50aと、取得した要求電力情報と、受電コイル19と給電コイル20との位置関係毎の電力伝送効率を示す電力伝送効率情報40aと、に基づいて、目標駐車位置を導出する導出部50bとを備え、導出部50bは、要求電力の大きさに応じて、電力伝送効率が最も高い第1位置関係とは異なる第2位置関係となる目標駐車位置を導出する。
【選択図】図3
特許請求の範囲
【請求項1】
駐車スペースに設置された一次コイルを有し、当該一次コイルにより受電した電力を所定の電力網に供給可能な受電装置と、二次コイルを有する電動車両と、の間で非接触により電力の授受を行う場合の、前記電動車両の前記駐車スペースにおける目標駐車位置を導出する制御装置であって、
前記制御装置は、
前記受電装置を介して前記電力網に供給する電力の目標値である要求電力を示す要求電力情報を取得する取得部と、
取得した前記要求電力情報と、前記一次コイルと前記二次コイルとの位置関係毎の電力伝送効率を示す電力伝送効率情報と、に基づいて、前記目標駐車位置を導出する導出部とを備え、
前記導出部は、前記要求電力の大きさに応じて、前記電力伝送効率が最も高い第1位置関係とは異なる第2位置関係となる前記目標駐車位置を導出する、
制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記制御装置は、導出した前記目標駐車位置を所定の表示部に表示させる表示制御部を更に備える、
制御装置。
【請求項3】
請求項1に記載の制御装置であって、
前記制御装置は、導出した前記目標駐車位置まで自動で移動するように前記電動車両に指示する移動指示部を更に備える、
制御装置。
【請求項4】
請求項1に記載の制御装置であって、
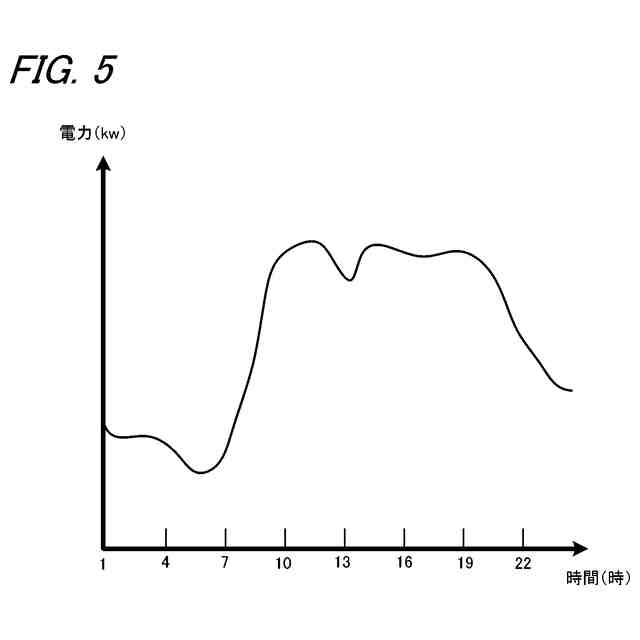
前記要求電力情報は、所定期間における前記要求電力の時系列推移を示す情報であり、
前記導出部は、前記所定期間において、前記要求電力を満たせる期間が所定割合以上となる位置を前記目標駐車位置として導出する、
制御装置。
【請求項5】
請求項1に記載の制御装置であって、
前記電力伝送効率は、前記一次コイルと前記二次コイルとの結合係数およびQ値に基づくパラメータである、
制御装置。
【請求項6】
請求項1に記載の制御装置であって、
前記導出部は、前記電力網に前記要求電力を供給する際の応答性の要求を満たす前記目標駐車位置を更に導出する、
制御装置。
【請求項7】
駐車スペースに設置された一次コイルを有し、当該一次コイルにより受電した電力を所定の電力網に供給可能な受電装置と、二次コイルを有する電動車両と、の間で非接触により電力の授受を行う場合の、前記電動車両の前記駐車スペースにおける目標駐車位置を導出するコンピュータが、
前記受電装置を介して前記電力網に供給する電力の目標値である要求電力を示す要求電力情報を取得し、
取得した前記要求電力情報と、前記一次コイルと前記二次コイルとの位置関係毎の電力伝送効率を示す電力伝送効率情報と、に基づいて、前記目標駐車位置を導出し、
前記要求電力の大きさに応じて、前記電力伝送効率が最も高い第1位置関係とは異なる第2位置関係となる前記目標駐車位置を導出する、処理を実行する、
制御方法。
【請求項8】
駐車スペースに設置された一次コイルを有し、当該一次コイルにより受電した電力を所定の電力網に供給可能な受電装置と、二次コイルを有する電動車両と、の間で非接触により電力の授受を行う場合の、前記電動車両の前記駐車スペースにおける目標駐車位置を導出するコンピュータに、
前記受電装置を介して前記電力網に供給する電力の目標値である要求電力を示す要求電力情報を取得し、
取得した前記要求電力情報と、前記一次コイルと前記二次コイルとの位置関係毎の電力伝送効率を示す電力伝送効率情報と、に基づいて、前記目標駐車位置を導出し、
前記要求電力の大きさに応じて、前記電力伝送効率が最も高い第1位置関係とは異なる第2位置関係となる前記目標駐車位置を導出させる、処理を実行させる、
制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、及び、制御プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、走行用のバッテリを搭載した車両と外部装置との間で電力の授受を行うシステムが知られている。例えば特許文献1および特許文献2には、駐車場の駐車枠に設けられた一次コイルを含む給電ユニットから、車両に設けられた二次コイルを含む受電ユニットへ非接触給電を行う構成が記載されている。なお、特許文献3には、車両から外部装置へ給電を行う構成が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-217461号公報
特開2011-217462号公報
特開2014-239621号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電力の授受を非接触で行う場合、例えば上述のように、給電側のコイルと受電側のコイルとの間で電磁誘導を利用して電力の授受を行う。その場合、通常、給電効率を良くするために(言い換えれば給電ロスを抑制するために)、給電側と受電側との互いのコイルの相対的な位置を互いの当該コイルの結合度が高い位置に調整して給電を行う。例えば、給電側と受電側との互いのコイルの中心を対向させて給電を行う。しかしながら、常に、当該結合度が高い位置に互いのコイルを配置させると、例えば給電側は、受電側で要求する電力を出力できないおそれがある。
【0005】
本発明は、受電側で要求する電力を出力できる可能性を高める制御装置、制御方法、及び、制御プログラムを提供する。
【課題を解決するための手段】
【0006】
本発明は、
駐車スペースに設置された一次コイルを有し、当該一次コイルにより受電した電力を所定の電力網に供給可能な受電装置と、二次コイルを有する電動車両と、の間で非接触により電力の授受を行う場合の、前記電動車両の前記駐車スペースにおける目標駐車位置を導出する制御装置であって、
前記制御装置は、
前記受電装置を介して前記電力網に供給する電力の目標値である要求電力を示す要求電力情報を取得する取得部と、
取得した前記要求電力情報と、前記一次コイルと前記二次コイルとの位置関係毎の電力伝送効率を示す電力伝送効率情報と、に基づいて、前記目標駐車位置を導出する導出部と
を備え、
前記導出部は、前記要求電力の大きさに応じて、前記電力伝送効率が最も高い第1位置関係とは異なる第2位置関係となる前記目標駐車位置を導出する。
【0007】
また、本発明は、
駐車スペースに設置された一次コイルを有し、当該一次コイルにより受電した電力を所定の電力網に供給可能な受電装置と、二次コイルを有する電動車両と、の間で非接触により電力の授受を行う場合の、前記電動車両の前記駐車スペースにおける目標駐車位置を導出するコンピュータが、
前記受電装置を介して前記電力網に供給する電力の目標値である要求電力を示す要求電力情報を取得し、
取得した前記要求電力情報と、前記一次コイルと前記二次コイルとの位置関係毎の電力伝送効率を示す電力伝送効率情報と、に基づいて、前記目標駐車位置を導出し、
前記要求電力の大きさに応じて、前記電力伝送効率が最も高い第1位置関係とは異なる第2位置関係となる前記目標駐車位置を導出する、処理を実行する。
【0008】
また、本発明は、
駐車スペースに設置された一次コイルを有し、当該一次コイルにより受電した電力を所定の電力網に供給可能な受電装置と、二次コイルを有する電動車両と、の間で非接触により電力の授受を行う場合の、前記電動車両の前記駐車スペースにおける目標駐車位置を導出するコンピュータに、
前記受電装置を介して前記電力網に供給する電力の目標値である要求電力を示す要求電力情報を取得し、
取得した前記要求電力情報と、前記一次コイルと前記二次コイルとの位置関係毎の電力伝送効率を示す電力伝送効率情報と、に基づいて、前記目標駐車位置を導出し、
前記要求電力の大きさに応じて、前記電力伝送効率が最も高い第1位置関係とは異なる第2位置関係となる前記目標駐車位置を導出させる、処理を実行させる。
【発明の効果】
【0009】
本発明によれば、受電側で要求する電力を出力できる可能性を高めることができる。
【図面の簡単な説明】
【0010】
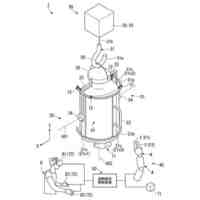
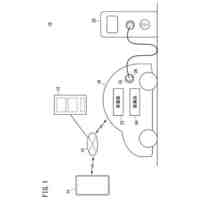
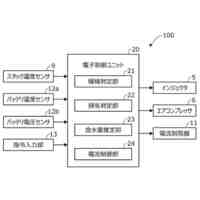
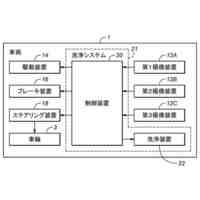
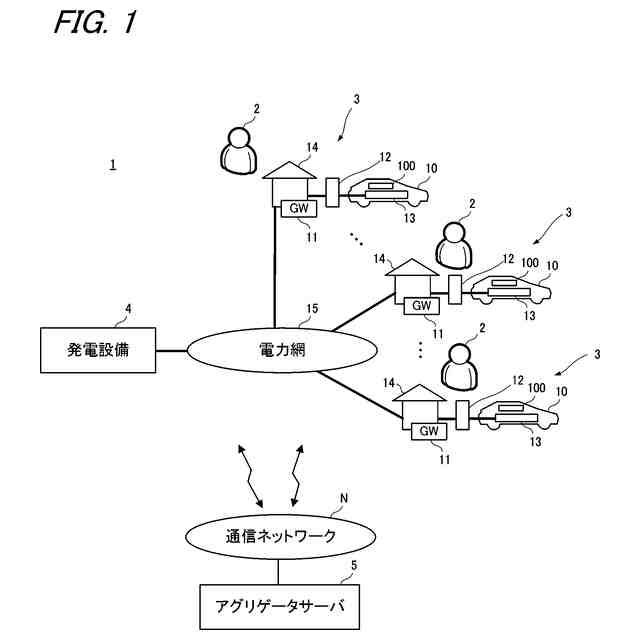
本実施形態におけるV2Gシステムの一例を説明するための図である。
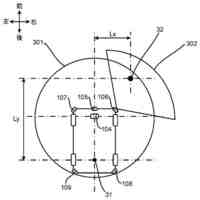
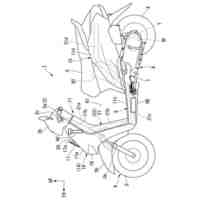
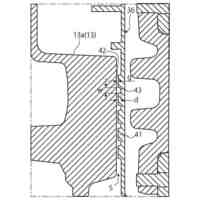
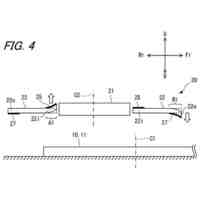
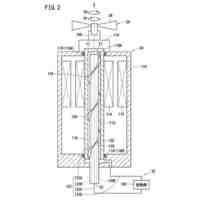
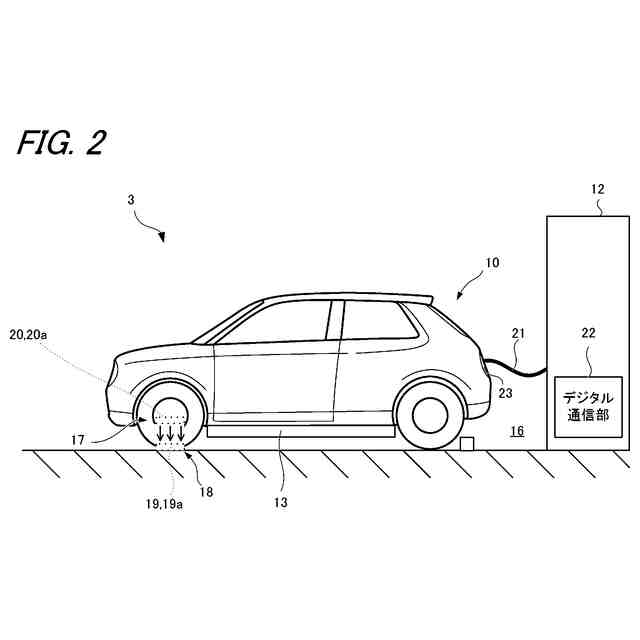
非接触による電力伝送の一例を示す図であって、駐車スペースに電動車両が駐車され、非接触給電が行われている状態を示す図である。
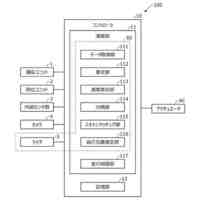
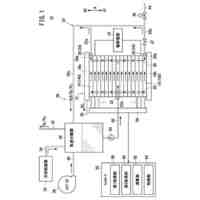
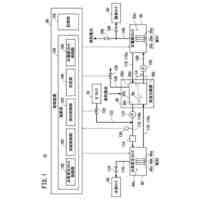
本実施形態における制御装置を搭載した電動車両の構成を示すブロック図である。
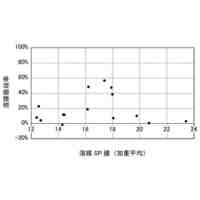
kQマップの一例を示す図である。
要求電力情報の一例を示す図である。
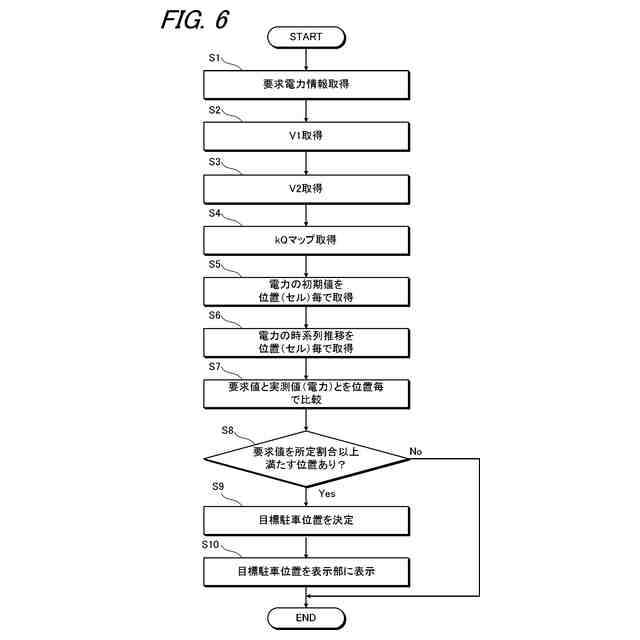
目標駐車位置を導出する処理の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
12日前
本田技研工業株式会社
回転機械
11日前
本田技研工業株式会社
ロボット
10日前
本田技研工業株式会社
触媒インク
12日前
本田技研工業株式会社
触媒インク
12日前
本田技研工業株式会社
物体検出装置
22日前
本田技研工業株式会社
導体接合方法
18日前
本田技研工業株式会社
鞍乗り型車両
16日前
本田技研工業株式会社
作業システム
11日前
本田技研工業株式会社
鞍乗り型車両
11日前
本田技研工業株式会社
鞍乗り型車両
11日前
本田技研工業株式会社
車両制御装置
18日前
本田技研工業株式会社
動力伝達装置
9日前
本田技研工業株式会社
位置推定装置
18日前
本田技研工業株式会社
電力変換装置
19日前
本田技研工業株式会社
管理システム
19日前
本田技研工業株式会社
鞍乗り型車両
2日前
本田技研工業株式会社
鞍乗り型車両
4日前
本田技研工業株式会社
クラッチ装置
3日前
本田技研工業株式会社
水電解システム
18日前
本田技研工業株式会社
水電解システム
8日前
本田技研工業株式会社
水電解システム
12日前
本田技研工業株式会社
非接触受電装置
10日前
本田技研工業株式会社
形状計測システム
16日前
本田技研工業株式会社
燃料電池システム
8日前
本田技研工業株式会社
電気化学スタック
3日前
本田技研工業株式会社
回転電機システム
11日前
本田技研工業株式会社
冷却装置及び飛行体
5日前
本田技研工業株式会社
充給電管理システム
22日前
本田技研工業株式会社
冷却装置及び飛行体
12日前
本田技研工業株式会社
サイドスタンド構造
16日前
本田技研工業株式会社
航空機用電動駆動装置
15日前
本田技研工業株式会社
撮像装置の洗浄システム
17日前
本田技研工業株式会社
固体二次電池の製造方法
18日前
本田技研工業株式会社
ステータコアの製造方法
22日前
本田技研工業株式会社
再生型燃料電池システム
17日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ