TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131293
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028950
出願日
2024-02-28
発明の名称
ロボットハンド
出願人
国立大学法人大阪大学
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
15/00 20060101AFI20250902BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】広い範囲のサイズの対象物に適合したロボットハンドを実現する。
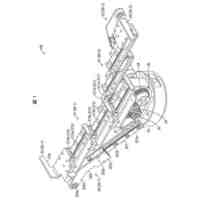
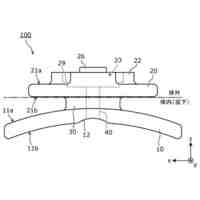
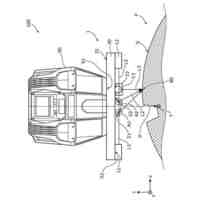
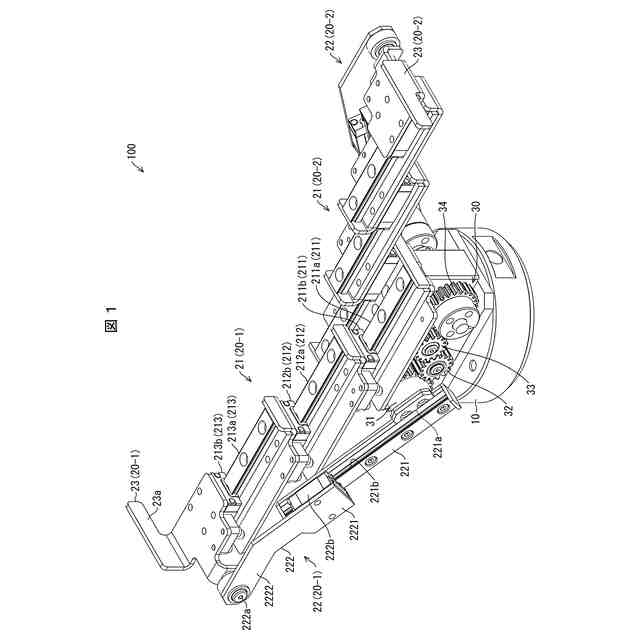
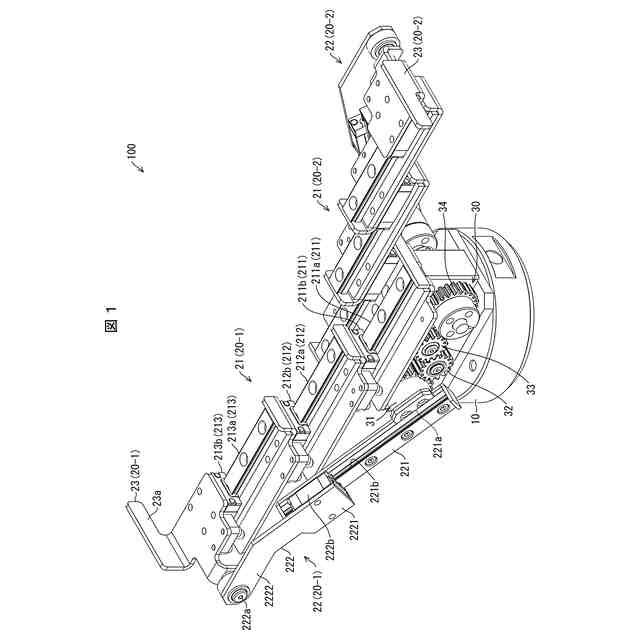
【解決手段】ロボットハンド(100)は、把持機構(20)と、駆動部(30)と、を備え、前記把持機構は、第1レール部材(211a)に対してスライド可能な第3レール部材(213a)と、前記第3レール部材に対してスライド可能に接続されている第3ブロック部材(213b)と、を備え、前記駆動部は、前記第3レール部材を介さずに前記第3ブロック部材に駆動力を付与する。
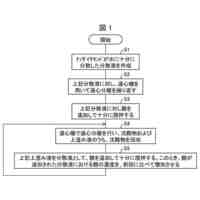
【選択図】図1
特許請求の範囲
【請求項1】
基部と、
把持機構と、
駆動部と、を備え、
前記把持機構は、
前記基部に対して第1方向に沿ってスライド可能な第1スライド部と、
前記第1スライド部に対して前記第1方向に沿ってスライド可能に接続されている第2スライド部と、
前記第2スライド部に設けられる把持部と、を備え、
前記駆動部は、前記第1方向に移動するための駆動力を、前記第1スライド部を介さずに前記第2スライド部に付与する、ロボットハンド。
続きを表示(約 930 文字)
【請求項2】
前記把持機構は、
前記基部に対して前記第1方向と直交する第2方向に伸びる第1軸を中心に回転するように固定され、スライド軸を有する第1回転部材と、
前記第2スライド部に対して前記第2方向に伸びる第2軸を中心に回転するように固定され、前記第1回転部材の前記スライド軸に沿ってスライドするスライド部材と、を備える、請求項1に記載のロボットハンド。
【請求項3】
前記スライド部材は、前記スライド軸からずれた位置で前記第2スライド部に固定されている、請求項2に記載のロボットハンド。
【請求項4】
前記スライド部材は、前記スライド軸に沿う第1部分と、前記把持部が完全に開いたときに前記第1方向に沿う第2部分とを有する、請求項3に記載のロボットハンド。
【請求項5】
前記駆動部は、前記第2スライド部に付与する駆動力を、前記第2スライド部の前記第1方向の位置に応じて制御する、請求項2に記載のロボットハンド。
【請求項6】
前記基部に対して前記第1方向と直交する第3方向に伸びる第3軸を中心に回転するように固定される第2回転部材を備え、
前記把持機構は、前記第2スライド部と前記第2回転部材とを接続し、前記第2回転部材の回転駆動を前記第2スライド部の前記第1方向のスライド駆動に変換するチェーン部材を備える、請求項1に記載のロボットハンド。
【請求項7】
前記把持部が完全に閉じている状態から前記把持部が開くとき、前記第1スライド部より先に前記第2スライド部がスライドする、請求項1または6に記載のロボットハンド。
【請求項8】
前記基部は、被係合部を有し、
前記第1スライド部は、前記被係合部に係合可能な係合部を有し、
前記係合部は、前記被係合部に係合しているとき、所定の駆動力で前記被係合部から移動せず、
前記把持部が完全に閉じているとき、
前記第2スライド部は、前記所定の駆動力でスライド可能であり、
前記係合部は、前記被係合部に係合している、請求項7に記載のロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
対象物を把持するためのロボットハンドを備えるロボットが広く知られている。ロボットハンドは、典型的には、二指平行グリッパの形態で使用される。ここで、二指平行グリッパとは、一対の把持部(指部)が互いに接近または離間するように動作し、一対の把持部が接近することによって対象物を把持する、といった機構を有するロボットハンドのことである。このようなロボットハンドを備えるロボットは、工場等の製造現場におけるピックアンドプレースおよび対象物の固定作業などに使用され得る。
【0003】
二指平行グリッパのロボットハンドとしては、例えば、バーリンケージを用いたリンク式またはリニアスライダーを用いたリニア式等の機構が知られている。リンク式またはリニア式のロボットハンドは、例えば下記の特許文献1-3に開示されている。
【先行技術文献】
【特許文献】
【0004】
特許5351161号
特開2021-133444号公報
特開2021-70076号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
リンク式のロボットハンドでは、基台から伸びるリンク部材の回転運動を、当該リンク部材の先端に設けられた把持部の水平移動に変換している。当該把持部の開き幅は、10~20cm程度となる。また、把持部は、完全に直線に沿って移動するわけではなく、平面内の曲線に沿って移動する。そのため、把持部により対象物を把持するとき、対象物は把持部からの圧力と接線方向の摩擦力とを受ける。したがって、把持部は対象物を安定して把持できない可能性がある。
【0006】
一方、リニア式のロボットハンドでは、リニアスライダーを使用して把持部を移動させるため、把持部は、直線に沿って水平移動する。そのため、把持部により対象物を把持するとき、対象物は把持部からの圧力のみを受ける。したがって、リニア式のロボットハンドは、対象物を安定して把持できるといった利点を有する。
【0007】
しかしながら、従来のリニア式のロボットハンドにおける把持部の可動範囲は、リニアスライダーの長さに限定される。そのため、当該把持部の開き幅は、典型的には2~6cm程度となる。大きな対象物を把持するためには、リニアスライダーの長さを大きくするか、完全に閉じ切ることができない把持部を使用する必要があるが、このようなロボットハンドは、小さな対象物を把持するのに不利である。言い換えると、従来のリニア式のロボットハンドでは、広い範囲のサイズの対象物に対応することが困難である。
【0008】
本発明の一態様は、広い範囲のサイズの対象物に適合したロボットハンドを実現することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明の態様1に係るロボットハンドは、基部と、把持機構と、駆動部と、を備え、前記把持機構は、前記基部に対して第1方向に沿ってスライド可能な第1スライド部と、前記第1スライド部に対して前記第1方向に沿ってスライド可能に接続されている第2スライド部と、前記第2スライド部に設けられる把持部と、を備え、前記駆動部は、前記第1方向に移動するための駆動力を、前記第1スライド部を介さずに前記第2スライド部に付与する。
【0010】
本発明の態様2に係るロボットハンドでは、上記態様1において、前記把持機構は、前記基部に対して前記第1方向と直交する第2方向に伸びる第1軸を中心に回転するように固定され、スライド軸を有する第1回転部材と、前記第2スライド部に対して前記第2方向に伸びる第2軸を中心に回転するように固定され、前記第1回転部材の前記スライド軸に沿ってスライドするスライド部材と、を備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人大阪大学
栄養パルス
5か月前
国立大学法人大阪大学
細胞シート
2か月前
国立大学法人大阪大学
ロボットハンド
5日前
国立大学法人大阪大学
発光タンパク質
4か月前
国立大学法人大阪大学
原子力発電装置
3か月前
国立大学法人大阪大学
内視鏡システム
3か月前
国立大学法人大阪大学
眼瞼痙攣緩和具
1か月前
国立大学法人大阪大学
漏洩情報抑制回路
1か月前
トヨタ自動車株式会社
電池
2か月前
国立大学法人大阪大学
電気泳動装置および電気泳動法
13日前
国立大学法人大阪大学
コネクタ取付具およびコネクタ部材
4か月前
大和ハウス工業株式会社
反応装置
3か月前
国立大学法人大阪大学
化合物の製造方法、及び金属多核錯体
4日前
国立大学法人大阪大学
タンパク質間相互作用を可視化する方法
3日前
日本電信電話株式会社
量子鍵配送装置
4か月前
国立大学法人大阪大学
光発電システムの出力電力特性の最適化
4か月前
株式会社丸島アクアシステム
溶接方法
5か月前
株式会社神戸製鋼所
ねじり疲労評価方法
3か月前
株式会社トクヤマ
ケトン誘導体の製造方法
1か月前
国立大学法人大阪大学
ナノダイヤモンドの製造方法および製造装置
2か月前
株式会社ジャパンディスプレイ
液晶光学素子
3か月前
日本電信電話株式会社
ロボットVRシステム
5か月前
日本電信電話株式会社
ロボットVRシステム
5か月前
株式会社トクヤマ
グルコン酸誘導体の製造方法
5か月前
日本製鉄株式会社
鉄鉱石の還元気化脱リン方法
5か月前
日本製鉄株式会社
鉄鉱石の還元気化脱リン方法
5か月前
株式会社塚田メディカル・リサーチ
カテーテル
2か月前
日東紡績株式会社
二酸化炭素の吸収又は脱着剤
1か月前
国立大学法人大阪大学
治具、システム、方法及びコンピュータプログラム
3か月前
国立大学法人大阪大学
セミクラスレートハイドレートおよびその製造方法
2か月前
株式会社神戸製鋼所
超音波送受信方法および該装置
4か月前
国立大学法人大阪大学
波長変換素子、波長変換素子の製造方法及び発光装置
5か月前
国立大学法人大阪大学
トラッキング装置、トラッキング方法及びプログラム
2か月前
三菱重工業株式会社
劣化診断方法および劣化診断装置
2か月前
エヌ・イーケムキャット株式会社
還元的アミノ化触媒
1か月前
株式会社マンダム
皮膚疾患抑制剤のスクリーニング方法
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ