TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132290
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029730
出願日
2024-02-29
発明の名称
圃場作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250903BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】接触式の障害物センサ及び非接触式の障害物センサを備えながらも、非接触式の障害物センサの損傷が回避できる、圃場作業車が要望されている。
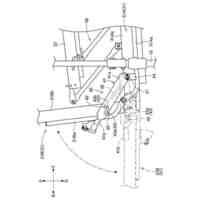
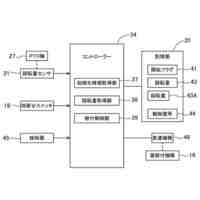
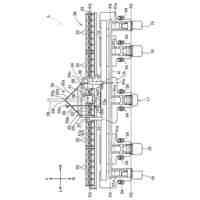
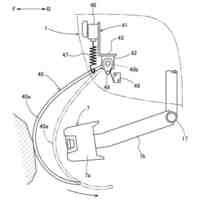
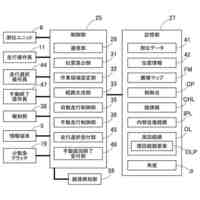
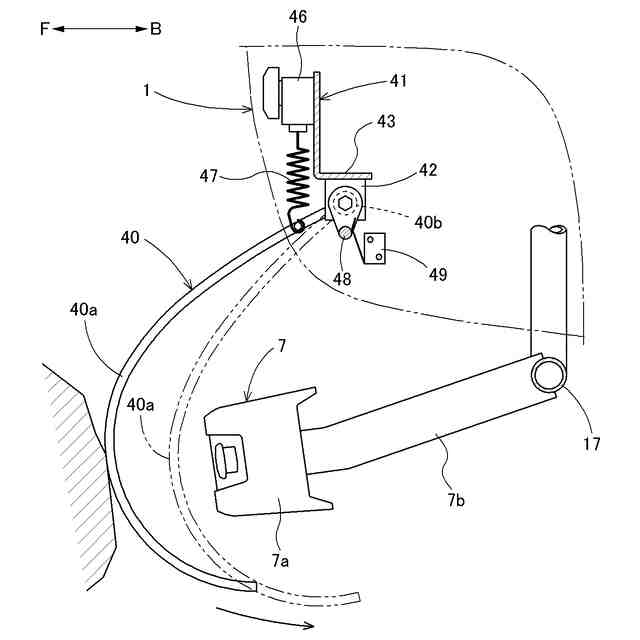
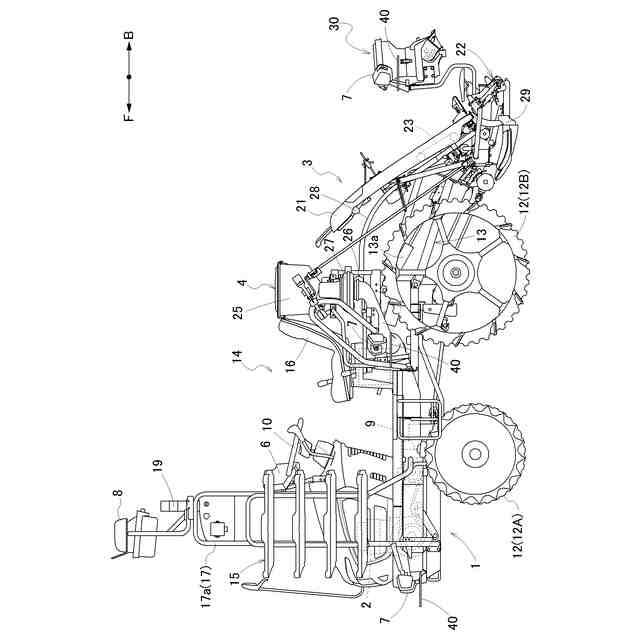
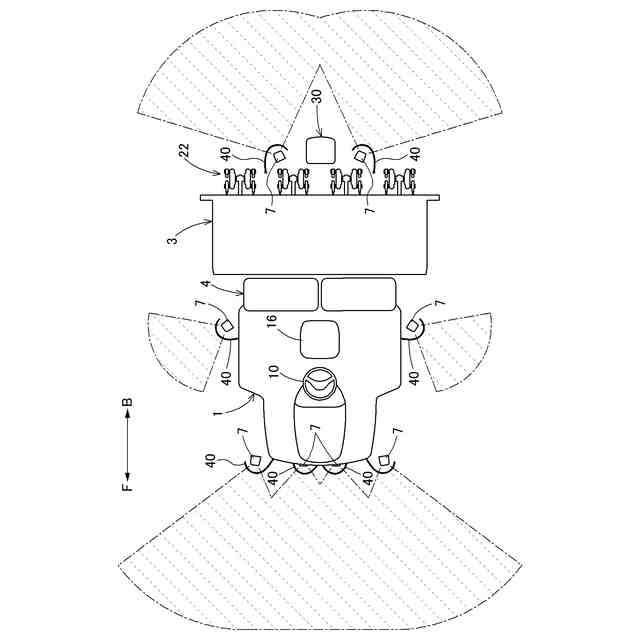
【解決手段】圃場作業車は、車体1に取り付けられて車体1の周囲を走査する非接触物体検出センサ7と、非接触物体検出センサ7と物体との接触に先立って物体と接触するように配置されたセンサガード40と、センサガード40と物体との接触を検出する接触検出器49と、接触検出器49からの物体接触信号に基づいて車体1を停止させる走行制御部とを備える。
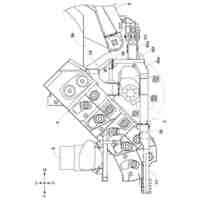
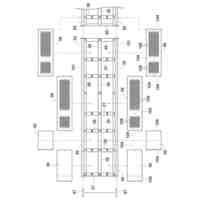
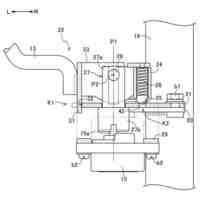
【選択図】図3
特許請求の範囲
【請求項1】
車体に取り付けられて前記車体の周囲を走査する非接触物体検出センサと、
前記非接触物体検出センサと物体との接触に先立って前記物体と接触するように配置されたセンサガードと、
前記センサガードと前記物体との接触を検出する接触検出器と、
前記接触検出器からの物体接触信号に基づいて前記車体を停止させる走行制御部と、を備える圃場作業車。
続きを表示(約 810 文字)
【請求項2】
前記センサガードの地上高さは、前記非接触物体検出センサより低く、かつ、前記センサガードは、平面視で前記非接触物体検出センサを外囲するように配置されている請求項1に記載の圃場作業車。
【請求項3】
前記センサガードは、前記非接触物体検出センサの周囲領域における外側領域を外囲する半円弧状の湾曲部材である請求項2に記載の圃場作業車。
【請求項4】
前記センサガードは、前記物体との接触に伴って所定姿勢から揺動する揺動体であり、前記接触検出器は前記センサガードの揺動変位を検出するスイッチである請求項1に記載の圃場作業車。
【請求項5】
前記センサガードは、平面視でアーチ状に前記非接触物体検出センサを外囲する形状を有し、前記物体との接触時に鉛直揺動軸周りに揺動する請求項4に記載の圃場作業車。
【請求項6】
前記センサガードは、弾性体による付勢により前記所定姿勢が維持される請求項4に記載の圃場作業車。
【請求項7】
前記弾性体による前記センサガードに対する付勢力は、付勢力調節器によって、調節される請求項6に記載の圃場作業車。
【請求項8】
前記センサガードは、前記鉛直揺動軸周りの揺動によって、車体近傍に収納される請求項5に記載の圃場作業車。
【請求項9】
前記センサガードは、前記非接触物体検出センサの平面視での走査範囲角度にわたってアーチ状に前記非接触物体検出センサを外囲しており、前記センサガードは前記物体との接触により変位する請求項1に記載の圃場作業車。
【請求項10】
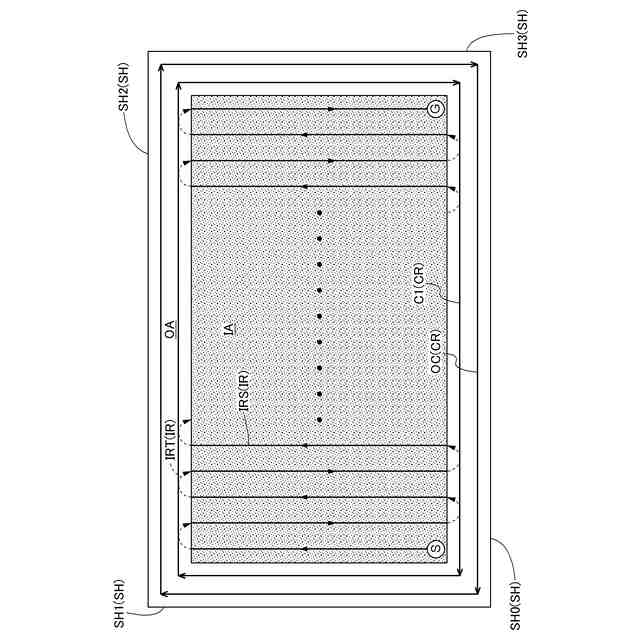
測位データに基づいて車体位置を算出する車体位置算出部が備えられ、前記走行制御部は、目標走行経路と前記車体位置とに基づいて前記車体を自動走行させる請求項1から9のいずれか一項に記載の圃場作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車体周囲の物体を検出する機能を有する圃場作業車に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、接触式の障害物センサによる障害物の検出により、走行装置に伝動する伝動機構を中立状態へ切換えて走行機体を停止させる作業機(圃場作業車の一種)が、開示されている。特許文献2には、衛星測位を用いて機体位置を算出する機体位置算出部と、機体の周囲の障害物を検知する障害物検知装置としてのソナーセンサと、無人自動走行中での障害物検知に応じて自動走行を停止させる制御ユニットとを備えた自動走行可能な作業機(圃場作業車の一種)が、開示されている。さらに、特許文献3では、機体の前部にリミットスイッチを用いた接触式の障害物センサとして機能するバンパと、当該バンパの前面に設けられた非接触式の障害物センサとしての超音波センサとを備え、接触式の障害物センサや非接触式の障害物センサが車体前方にある障害物を感知した場合に自動走行を停止する作業車(圃場作業車の一種)が、開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-167541号公報
特開2021-108617号公報
特開昭62-297909号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献3による作業車は、接触式の障害物センサ及び非接触式の障害物センサを備えているので、2種類の障害物センサの特性を利用することができる。しかしながら、接触式の障害物センサの接触体としてのバンパに非接触式の障害物センサとしての超音波センサが備えられているので、この超音波センサは、バンパと物体との接触(衝突)時の衝撃により、損傷を受ける可能性がある。
【0005】
このことから、接触式の障害物センサ及び非接触式の障害物センサを備えながらも、非接触式の障害物センサの損傷が回避できる、圃場作業車が要望されている。
【課題を解決するための手段】
【0006】
本発明による圃場作業車は、車体に取り付けられて前記車体の周囲を走査する非接触物体検出センサと、前記非接触物体検出センサと物体との接触に先立って前記物体と接触するように配置されたセンサガードと、前記センサガードと前記物体との接触を検出する接触検出器と、前記接触検出器からの物体接触信号に基づいて前記車体を停止させる走行制御部とを備える。
【0007】
この構成によれば、非接触式の障害物センサが車体の周囲に存在する物体(障害物や境界物)と接触(衝突)する前に、センサガードが当該物体に接触(衝突)するように配置されており、センサガードと物体との接触に伴うセンサガードの挙動は接触検出器によって検出される。つまり、センサガードは、非接触物体検出センサと物体との接触に先立って物体を検出する接触式の障害物センサとして機能する。これにより、本発明による圃場作業車では、接触式の障害物センサ及び非接触式の障害物センサを備えながらも、比較的高価で繊細な構造を有する非接触式の障害物センサ(ソナーやレーザなど)の損傷が回避できる。また、非接触式の障害物センサによって物体(畔などの障害物)までの距離を把握しながら、接触式の障害物センサとして機能するセンサガードと障害物との接触により車体が停止されるまで、車体を畔などの障害物に近づけることができる。その際、センサガードが障害物に接触した場合には、車体が停止されるので、安全性が確保される。
【0008】
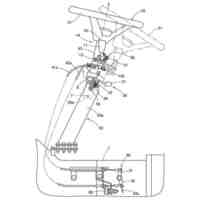
車体の周囲を走査する非接触物体検出センサによる物体検出の邪魔をしないためには、非接触物体検出センサの走査範囲内に、センサガードが位置しないことが好ましい。多くの非接触物体検出センサの走査範囲は、左右方向及び上下方向(特に上方)に拡大していくので、非接触物体検出センサの下方が接触式の障害物センサの位置として好適である。また、センサガードは、非接触物体検出センサが物体と接触する前に、物体に接触する必要がある。このことから、本発明では、前記センサガードの地上高さは、前記非接触物体検出センサより低く、かつ、前記センサガードは、平面視で前記非接触物体検出センサを外囲するように配置されている。
【0009】
センサガードは、車体の走行に伴って非接触物体検出センサが何らかの物体と接触することを防止するものであるので、非接触物体検出センサの周囲領域全体を外囲する必要はない。車体の走行に伴って非接触物体検出センサより先に物体に接触すればよいので、センサガードは、一部が開放された円弧状であることが好都合である。このことから、本発明では、前記センサガードは、前記非接触物体検出センサの周囲領域における外側領域を外囲する半円弧状の湾曲部材である。
【0010】
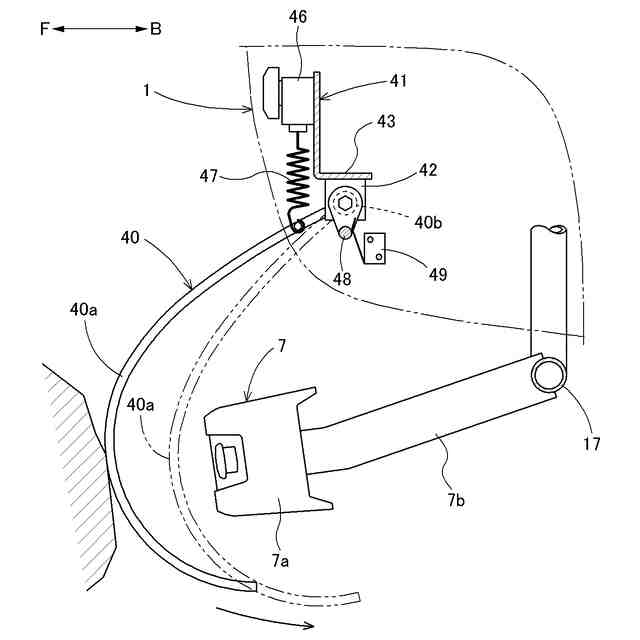
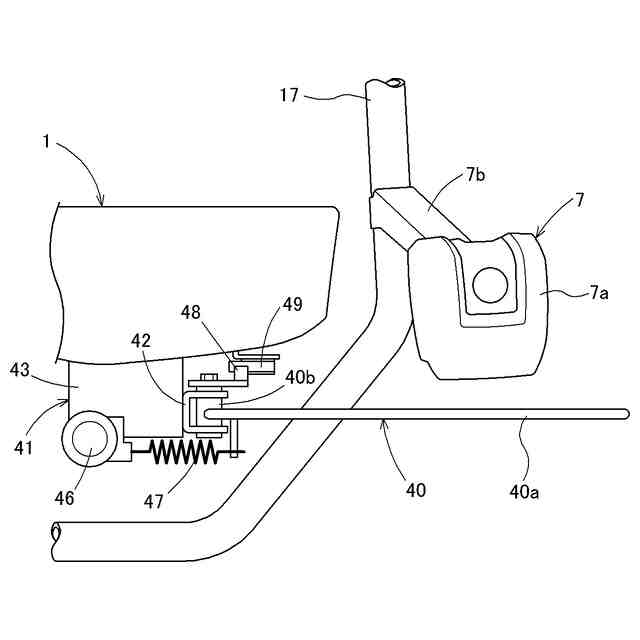
物体とセンサガードとの接触を検出するための好適な方法は、物体に接触した際に生じるセンサガードの挙動を検出することである。特に、センサガードを揺動体として構成し、物体との接触にともなうセンサガードの揺動変位を接触検出器、例えばリミットスイッチやリードスイッチや近接スイッチなどで検出することが好適である。このことから、本発明では、前記センサガードは、前記物体との接触に伴って所定姿勢から揺動する揺動体であり、前記接触検出器は前記センサガードの揺動変位を検出するスイッチである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
田植機
3日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
田植機
3日前
株式会社クボタ
作業車
28日前
株式会社クボタ
作業車
3日前
株式会社クボタ
田植機
6日前
株式会社クボタ
トラクタ
28日前
株式会社クボタケミックス
伸縮継手
15日前
株式会社クボタ
トラクタ
28日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
圃場作業機
29日前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
圃場作業車
3日前
株式会社クボタ
圃場作業車
1日前
株式会社クボタ
汚水処理装置
1か月前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
サトウキビ収穫機
2日前
株式会社クボタ
操作機構及び作業車
3日前
株式会社クボタ
走行制御システムおよび田植機
2日前
株式会社クボタケミックス
管路更生工法および管更生部材
24日前
株式会社クボタケミックス
管路更生工法および管更生部材
24日前
株式会社クボタ
経路生成システムおよび作業機
3日前
株式会社クボタ
判定方法、判定システム、および判定プログラム
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ