TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025131240
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028853
出願日
2024-02-28
発明の名称
サトウキビ収穫機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01D
45/10 20060101AFI20250902BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】トッパを用いて、収穫作業走行中であっても、サトウキビの茎部と葉部との間の領域を、切断できるサトウキビ収穫機を提供すること。
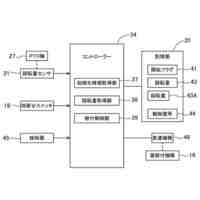
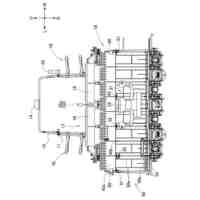
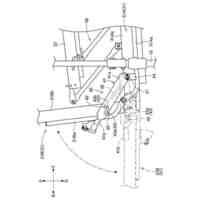
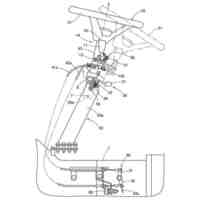
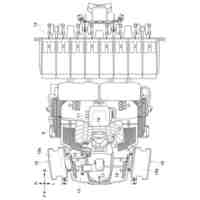
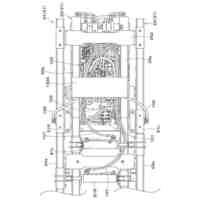
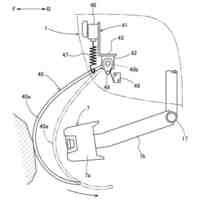
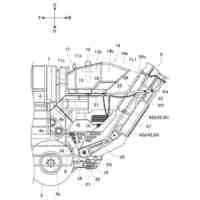
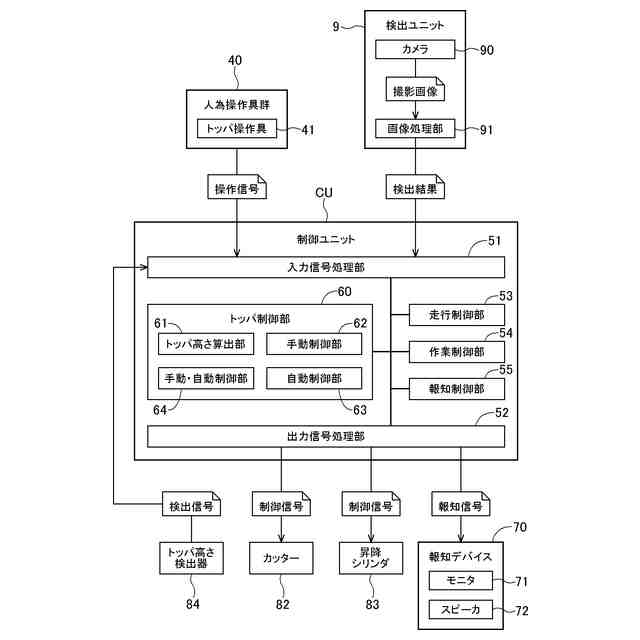
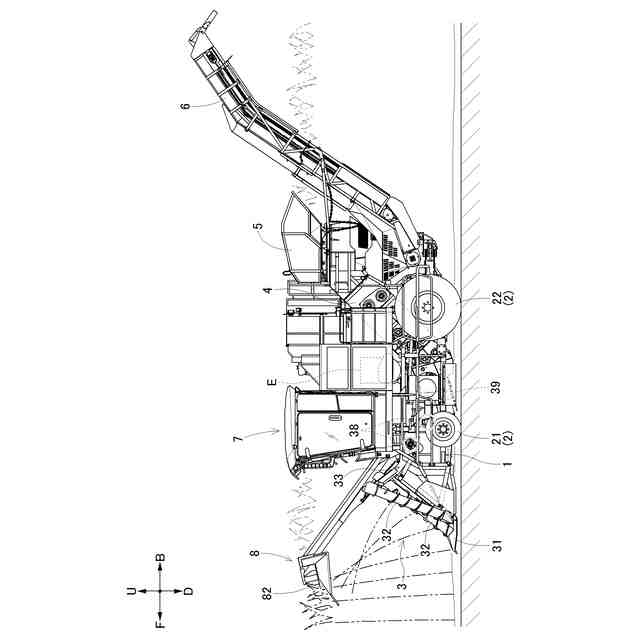
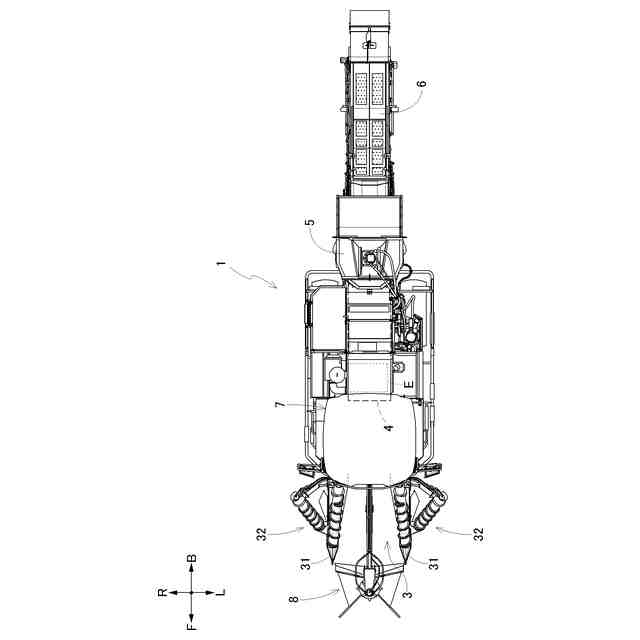
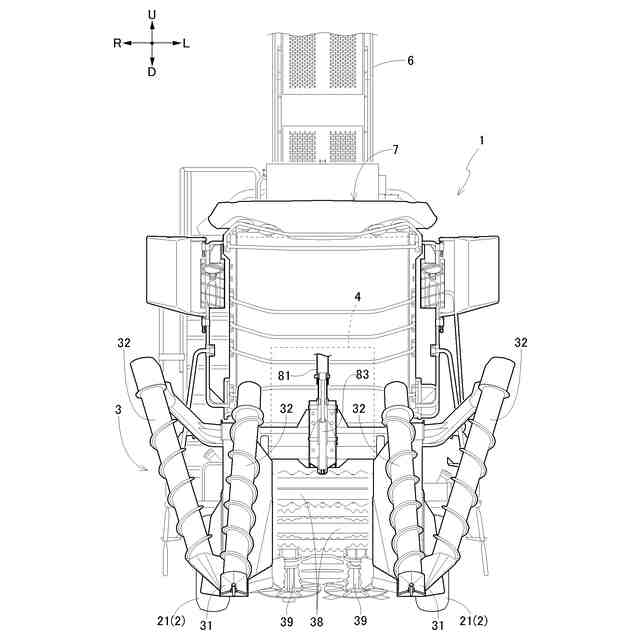
【解決手段】機体前部に設けられ、植立しているサトウキビを刈り取る刈取部と、刈取部にて刈り取られたサトウキビを機体後部に向けて搬送する搬送装置と、サトウキビの上部の葉部を切断するように刈取部の上方に配置されたトッパと、トッパを昇降させるトッパ昇降アクチュエータ83と、サトウキビの茎部または葉部あるいはその両方を検出する検出ユニット9とを備えたサトウキビ収穫機。
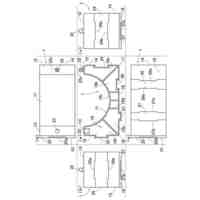
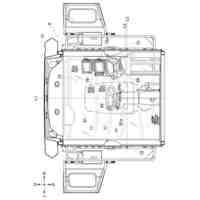
【選択図】図5
特許請求の範囲
【請求項1】
機体前部に設けられ、植立しているサトウキビを刈り取る刈取部と、
前記刈取部にて刈り取られた前記サトウキビを機体後部に向けて搬送する搬送装置と、
前記サトウキビの上部の葉部を切断するように前記刈取部の上方に配置されたトッパと、
前記トッパを昇降させるトッパ昇降アクチュエータと、
前記サトウキビの茎部または前記葉部あるいはその両方を検出する検出ユニットと、
を備えたサトウキビ収穫機。
続きを表示(約 770 文字)
【請求項2】
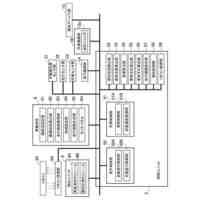
前記検出ユニットからの検出結果に基づいて、前記トッパ昇降アクチュエータの昇降動作を自動制御する自動制御部が備えられている請求項1に記載のサトウキビ収穫機。
【請求項3】
前記検出結果は、前記葉部と前記茎部との境界領域と前記トッパとの高さ位置関係であり、
前記自動制御部は、前記高さ位置関係に基づいて前記トッパ昇降アクチュエータを自動制御する請求項2に記載のサトウキビ収穫機。
【請求項4】
前記検出ユニットがカメラであり、前記検出ユニットには、前記カメラの撮影画像から前記境界領域を検出する画像処理部が含まれている請求項3に記載のサトウキビ収穫機。
【請求項5】
前記検出ユニットによる検出結果を操作者に報知する報知デバイスと、前記操作者による操作指令に基づいて、前記トッパ昇降アクチュエータを手動制御する手動制御部が備えられている請求項1に記載のサトウキビ収穫機。
【請求項6】
前記検出ユニットがカメラであり、前記報知デバイスがカメラモニタである請求項5に記載のサトウキビ収穫機。
【請求項7】
前記トッパ昇降アクチュエータの昇降動作を手動で制御する手動制御部と、前記トッパ昇降アクチュエータの前記昇降動作を自動で制御する自動制御部とが備えられている請求項1に記載のサトウキビ収穫機。
【請求項8】
前記手動制御部による前記昇降動作と、前記自動制御部による前記昇降動作とを選択する手動・自動選択部が備えられている請求項7に記載のサトウキビ収穫機。
【請求項9】
前記検出ユニットが前記サトウキビを検出しない場合、前記トッパの動作は停止される請求項1から8のいずれか一項に記載のサトウキビ収穫機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、植立しているサトウキビを刈り取って収穫するサトウキビ収穫機に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
サトウキビの収穫効率を高めるため、刈取部によってサトウキビの根元を刈り取るだけでなく、サトウキビの上部の葉部を切断するトッパを備えたサトウキビ収穫機がある。例えば、特許文献1には、植立しているサトウキビを刈り取る刈取部と、サトウキビの上部の葉部を切断するように刈取部の上方に配置されたトッパと、刈取部とトッパとによって刈り取られたサトウキビを機体後部に向けて搬送する搬送装置とを備えたサトウキビ収穫機が開示されている。このトッパは油圧シリンダによって高さ変更可能である。
【先行技術文献】
【特許文献】
【0003】
特開2022-102281号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のサトウキビ収穫機は昇降可能なトッパを備えているが、収穫作業走行前に、機体から離れた場所から目視でトッパによって切断されるサトウキビの茎部と葉部との間の領域を確認し、トッパを適正なトッパ高さに調節することはかなり面倒な作業となる。収穫作業走行中に運転席から目視でサトウキビの茎部と葉部との間の領域を確認することは実質的に不可能である。
【0005】
本発明の目的は、収穫作業走行中であっても、サトウキビの茎部と葉部との間の領域を認識または確認でき、トッパを用いた切断を適切に行いやすいサトウキビ収穫機を提供することである。
【課題を解決するための手段】
【0006】
本発明のサトウキビ収穫機は、機体前部に設けられ、植立しているサトウキビを刈り取る刈取部と、前記刈取部にて刈り取られた前記サトウキビを機体後部に向けて搬送する搬送装置と、前記サトウキビの上部の葉部を切断するように前記刈取部の上方に配置されたトッパと、前記トッパを昇降させるトッパ昇降アクチュエータと、前記サトウキビの茎部または前記葉部あるいはその両方を検出する検出ユニットと、を備える。
【0007】
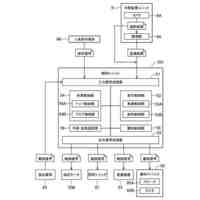
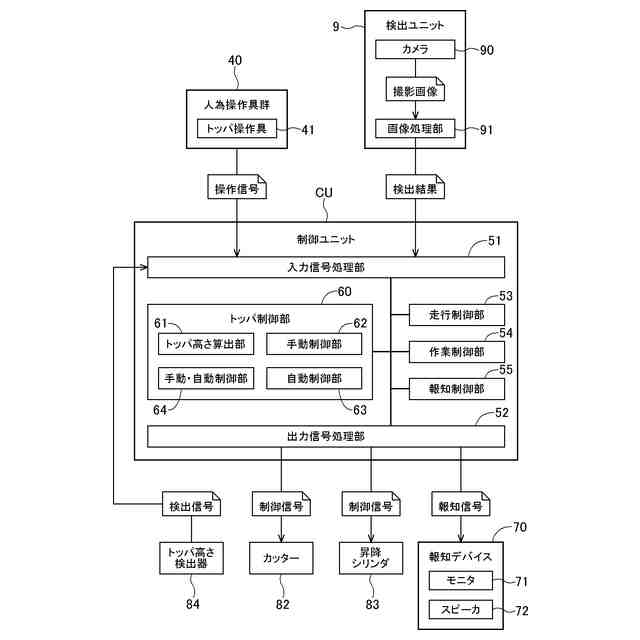
この構成によれば、検出ユニットによって、サトウキビの茎部または前記葉部あるいはその両方が検出されるので、その検出結果に基づいて、サトウキビ収穫機の制御系、あるいは運転者は、収穫作業走行中であっても、サトウキビの茎部と葉部との間に位置する、トッパによって切断すべき箇所の認識または確認が可能となる。
【0008】
検出ユニットの検出結果に基づいて、自動的にトッパが適正な高さに調節されると、運転者は、トッパ高さの調節作業から解放され、他の作業に集中することができる。このことから、本発明では、前記検出ユニットからの検出結果に基づいて、前記トッパ昇降アクチュエータの昇降動作を自動制御する自動制御部が備えられることが提案される。
【0009】
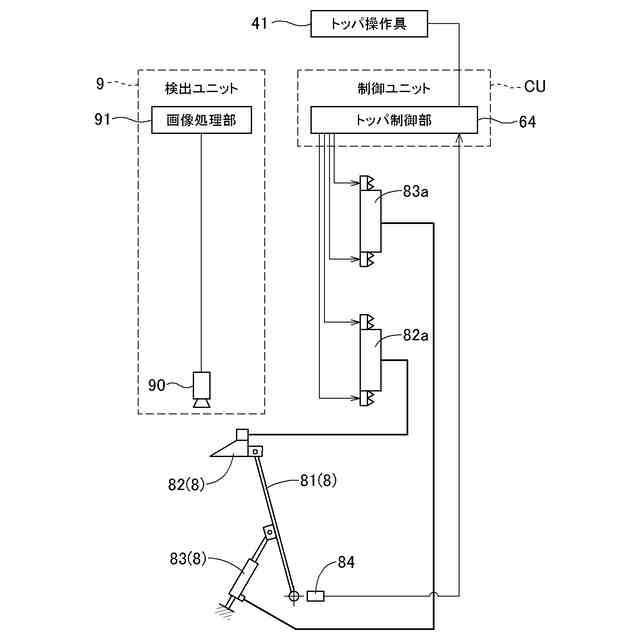
トッパ高さを自動制御する自動制御部に要求される機能は、サトウキビの葉部と茎部との境界領域にトッパを位置させ、この境界領域でサトウキビの葉部を切断して破棄することである。これを実現するために、本発明では、前記検出結果は、前記葉部と前記茎部との境界領域と前記トッパとの高さ位置関係であり、前記自動制御部は、前記高さ位置関係に基づいて前記トッパ昇降アクチュエータを自動制御することが提案される。
【0010】
サトウキビの茎部または前記葉部あるいはその両方、つまりサトウキビの葉部と茎部との境界領域を、簡単かつ正確に検出するためには、画像認識技術を用いることが好適である。このことから、本発明では、前記検出ユニットがカメラであり、前記検出ユニットには、前記カメラの撮影画像から前記境界領域を検出する画像処理部が含まれることが提案される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタケミックス
管枕
2か月前
株式会社クボタ
作業車
5日前
株式会社クボタ
田植機
8日前
株式会社クボタ
作業車
11日前
株式会社クボタ
田植機
5日前
株式会社クボタ
田植機
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタケミックス
伸縮継手
17日前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
作業車両
2か月前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
圃場作業機
1か月前
株式会社クボタ
圃場作業車
3日前
株式会社クボタ
圃場作業車
5日前
株式会社クボタ
汚水処理装置
1か月前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
株式会社クボタ
サトウキビ収穫機
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ