TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133408
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031343
出願日
2024-03-01
発明の名称
予測装置、予測方法及び予測プログラム
出願人
本田技研工業株式会社
代理人
弁理士法人大島特許事務所
主分類
A63B
71/06 20060101AFI20250904BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】 車椅子を走行させることにより競技を行う競技者の走行タイムを、競技者の身体能力を特徴づける項目の見込値に基づいて予測することができる予測装置、予測方法及び予測プログラムを提供する。
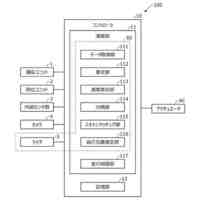
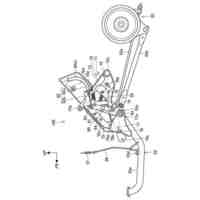
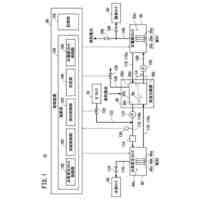
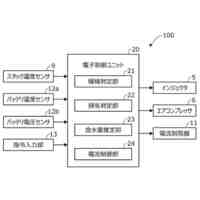
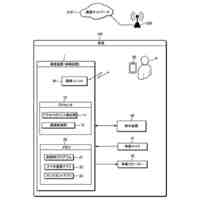
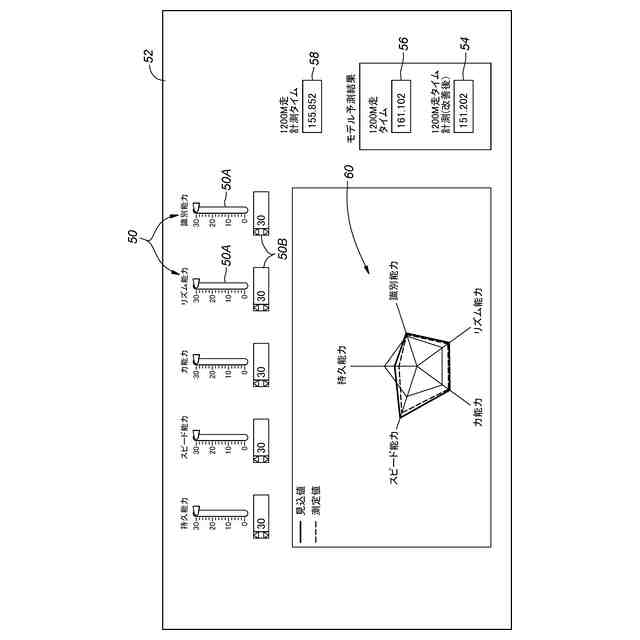
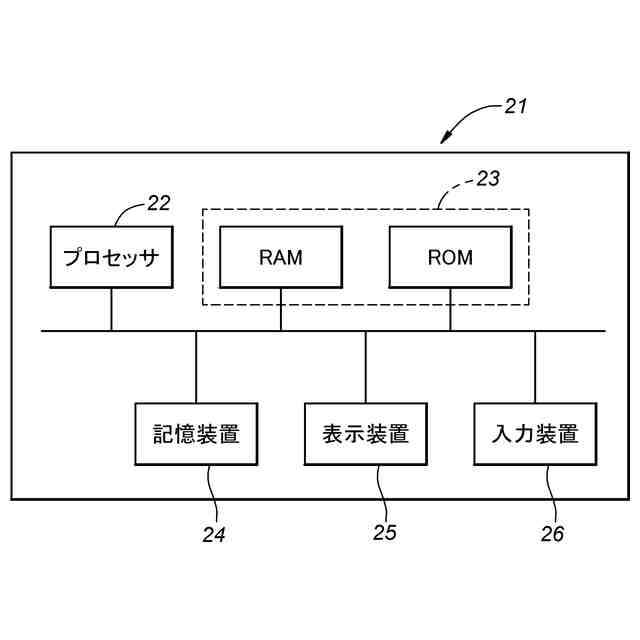
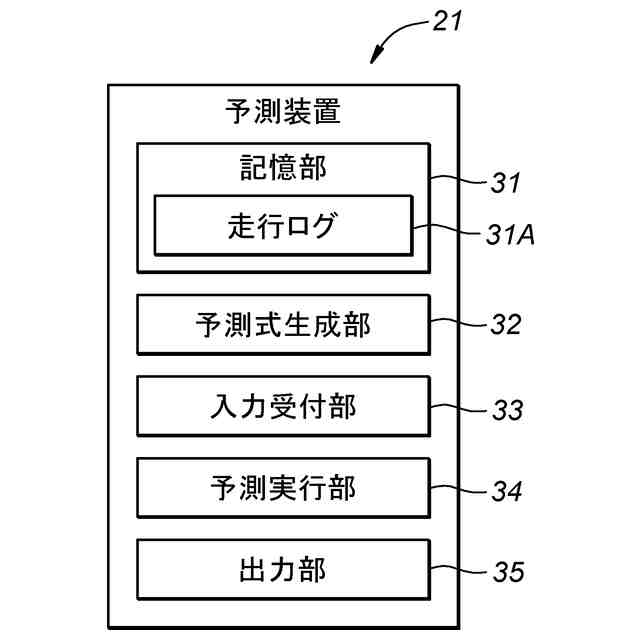
【解決手段】 車椅子1を走行させることにより競技を行う対象者の走行タイムを予測する予測装置21であって、過去において取得された、競技を行う競技者の身体能力に係る複数の項目それぞれの測定値と、競技者の走行タイムとを関連付けて記憶する記憶装置24と、項目のそれぞれに対応する見込値を取得して、対応する走行タイムの予測値を算出して出力するプロセッサ22と、を備える。
【選択図】 図9
特許請求の範囲
【請求項1】
車椅子を走行させることにより競技を行う対象者の走行タイムを予測する予測装置であって、
過去において取得された、前記競技を行う競技者の身体能力に係る少なくとも1つの項目に対応する測定値と、前記競技者の前記走行タイムとを関連付けて記憶する記憶装置と、
前記項目に対応する見込値を取得して、対応する前記走行タイムの予測値を算出して出力するプロセッサと、を備える予測装置。
続きを表示(約 1,000 文字)
【請求項2】
前記項目には、スピード能力、可動角能力、持久能力、リズム能力、識別能力、及び力能力の6つのうち、少なくとも1つが含まれる請求項1に記載の予測装置。
【請求項3】
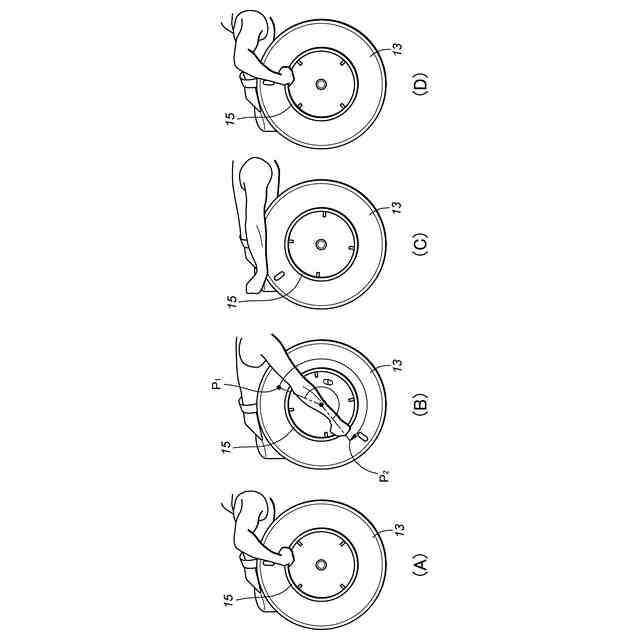
前記可動角能力は、前記競技者がハンドリムへの接触を開始した接触開始位置から、前記ハンドリムへの接触が終了する接触終了位置までの角度差により取得される請求項2に記載の予測装置。
【請求項4】
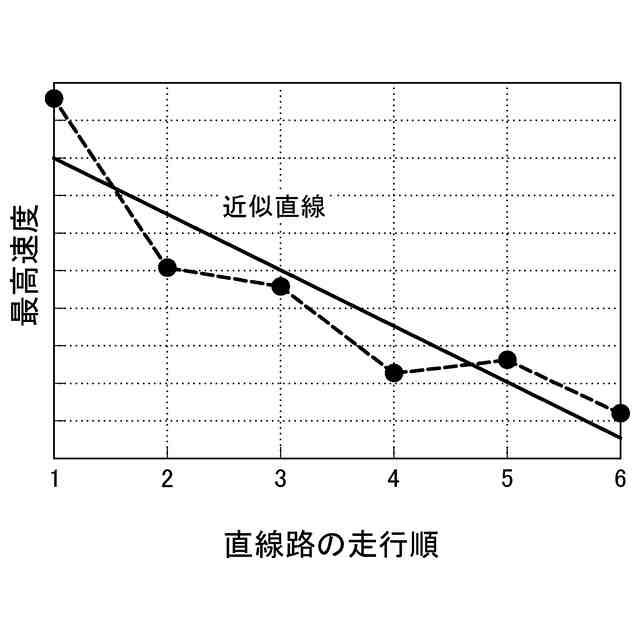
前記持久能力は、前記競技者に複数回トラック走行させ、1トラックの走行に要する時間の減少度合いを算出することにより取得される請求項2に記載の予測装置。
【請求項5】
前記リズム能力は、前記競技者が前記車椅子の後輪を1回転させたときに加える駆動力又は前記駆動力のハンドリムの接線方向成分の時間変化を示す波形の相関係数を算出することによって取得される請求項2に記載の予測装置。
【請求項6】
前記識別能力は、前記競技者が発揮する駆動力のハンドリムの接線方向成分である接線力と、前記駆動力の接線成分を除く成分の合力である押し付け力との比によって取得される請求項2に記載の予測装置。
【請求項7】
前記項目には、前記スピード能力、前記可動角能力、前記持久能力、前記リズム能力、前記識別能力、及び前記力能力の6つのうち、少なくとも4つが含まれる請求項2に記載の予測装置。
【請求項8】
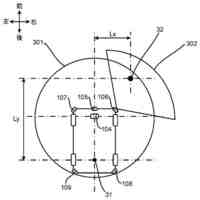
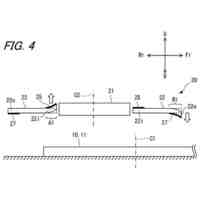
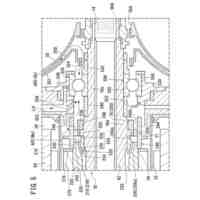
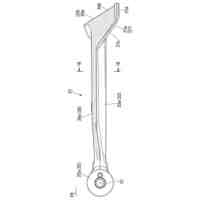
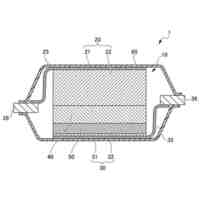
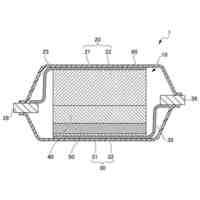
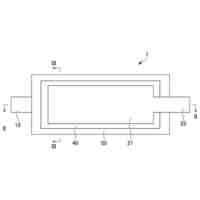
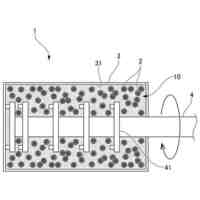
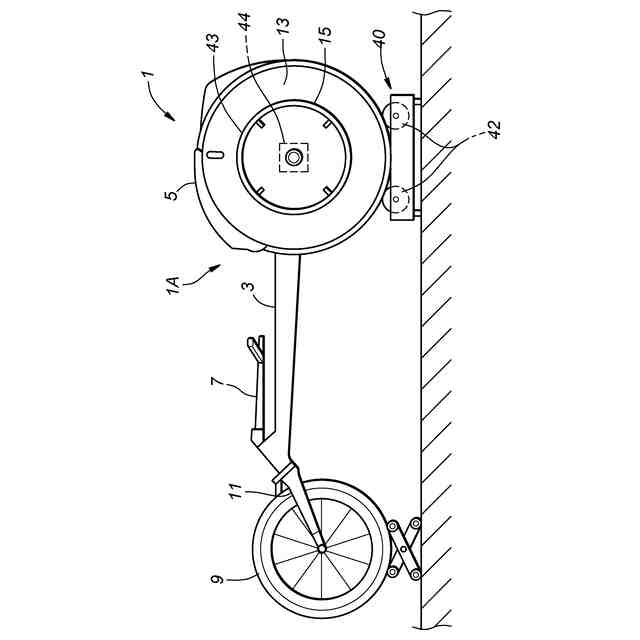
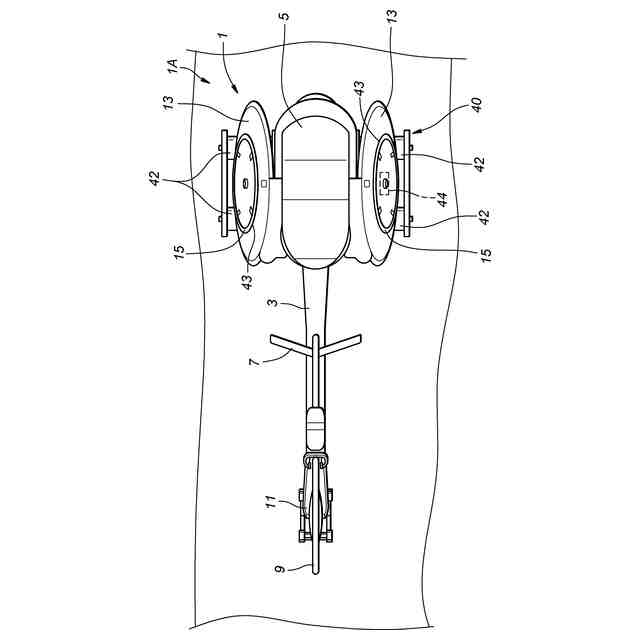
車体フレームと、後輪と、後輪に設けられたハンドリムと、前記ハンドリムに加わる力及び前記ハンドリムの回転位置を検出するセンサとを備えた前記車椅子を含み、
前記競技者に前記車椅子を用いて走行させることにより、前記測定値を取得する請求項1に記載の予測装置。
【請求項9】
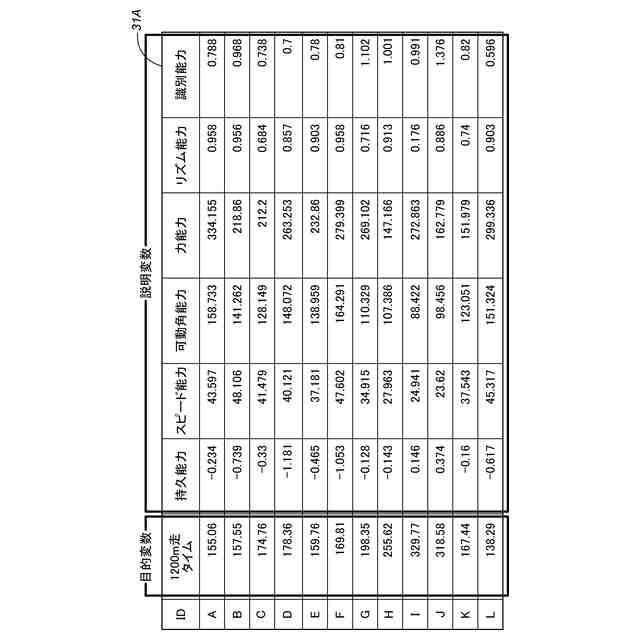
前記記憶装置は、複数の前記競技者ごとの、前記項目それぞれの前記測定値、及び、対応する前記走行タイムが関連付けられて記録された走行ログを記憶し、
前記プロセッサは、前記走行ログを用いて、前記測定値と、前記走行タイムとの関係を示す予測モデルを導出し、前記予測モデルと、前記見込値とを用いて、前記走行タイムを予測する請求項1~請求項8のいずれか1つの項に記載の予測装置。
【請求項10】
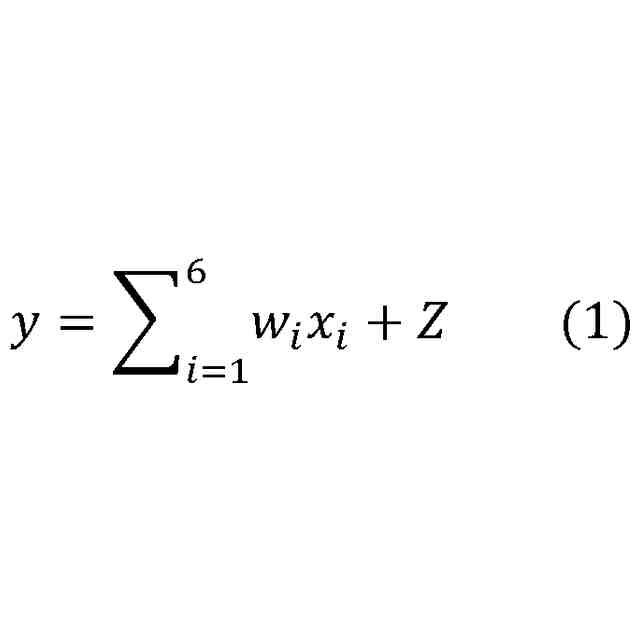
前記プロセッサは、前記競技者ごとの、前記項目それぞれの前記測定値、及び、対応する前記走行タイムを用いて、重回帰分析を行うことにより、前記予測モデルを取得する請求項9に記載の予測装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車椅子を走行させることにより競技を行う競技者の走行タイムを予測する予測装置、予測方法及び予測プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
トラックレース、マラソン等で用いられる競走用の車椅子においては、搭乗者のトレーニングのために、ハンドリムに対する搭乗者からの駆動力の印加位置を精度よく把握したいという要望がある。そこで、特許文献1は、車椅子の搭乗者の駆動力の印加位置を精度よく推定することができる印加位置推定システムを開示している。
【先行技術文献】
【特許文献】
【0003】
特許第7157723号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
競走用の車椅子を用いたトラックレース、マラソン等では走行タイムが競われる。特許文献1の印加位置推定システムによって得られる駆動力の印加位置は走行タイムを決める項目となり得る。しかしながら、走行タイムは印加位置以外の身体能力を特徴づける項目にも依存すると考えられる。
【0005】
本願発明者らは、競技者の身体能力を特徴づける項目のトレーニング後の見込値を入力することにより、走行タイムがどのように変化するかを予測することができれば、競技者や指導者に対し、トレーニングの示唆を与えることができると考えた。
【0006】
本発明は、以上の背景を鑑み、車椅子を走行させることにより競技を行う競技者の走行タイムを、競技者の身体能力を特徴づける項目の見込値に基づいて適切に予測することができる予測装置、予測方法及び予測プログラムを提供することを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明のある態様は、車椅子(1)を走行させることにより競技を行う対象者の走行タイムを予測する予測装置(21)であって、過去において取得された、前記競技を行う競技者の身体能力に係る少なくとも1つの項目に対応する測定値と、前記競技者の前記走行タイムとを関連付けて記憶する記憶装置(24)と、前記項目に対応する見込値を取得して、対応する前記走行タイムの予測値を算出して出力するプロセッサ(22)と、を備える。
【0008】
この態様によれば、過去において取得された、前記競技を行う競技者の身体能力に係る複数の項目それぞれの測定値と、前記競技者の前記走行タイムとを参照することが可能となるため、競技者の身体能力を特徴づける項目の見込値に基づいて走行タイムを適切に予測することができる。
【0009】
上記の態様において、好ましくは、前記項目には、スピード能力、可動角能力、持久能力、リズム能力、識別能力、及び力能力の6つのうち、少なくとも1つが含まれる。
【0010】
この態様によれば、競技者の身体能力を特徴づける項目を設定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
10日前
本田技研工業株式会社
回転機械
9日前
本田技研工業株式会社
ロボット
8日前
本田技研工業株式会社
触媒インク
10日前
本田技研工業株式会社
触媒インク
10日前
本田技研工業株式会社
位置推定装置
16日前
本田技研工業株式会社
動力伝達装置
7日前
本田技研工業株式会社
車両制御装置
16日前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
作業システム
9日前
本田技研工業株式会社
鞍乗り型車両
9日前
本田技研工業株式会社
鞍乗り型車両
9日前
本田技研工業株式会社
クラッチ装置
1日前
本田技研工業株式会社
鞍乗り型車両
今日
本田技研工業株式会社
鞍乗り型車両
2日前
本田技研工業株式会社
水電解システム
10日前
本田技研工業株式会社
水電解システム
6日前
本田技研工業株式会社
非接触受電装置
8日前
本田技研工業株式会社
回転電機システム
9日前
本田技研工業株式会社
形状計測システム
14日前
本田技研工業株式会社
燃料電池システム
6日前
本田技研工業株式会社
電気化学スタック
1日前
本田技研工業株式会社
サイドスタンド構造
14日前
本田技研工業株式会社
冷却装置及び飛行体
10日前
本田技研工業株式会社
冷却装置及び飛行体
3日前
本田技研工業株式会社
航空機用電動駆動装置
13日前
本田技研工業株式会社
撮像装置の洗浄システム
15日前
本田技研工業株式会社
再生型燃料電池システム
15日前
本田技研工業株式会社
固体二次電池の製造方法
16日前
本田技研工業株式会社
燃料電池の発電制御システム
15日前
本田技研工業株式会社
通信装置、及び通信制御方法
3日前
本田技研工業株式会社
電力供給システム及び移動体
2日前
本田技研工業株式会社
固体二次電池及びその製造方法
16日前
本田技研工業株式会社
固体二次電池及びその製造方法
今日
本田技研工業株式会社
電源装置及び電源装置の制御方法
16日前
本田技研工業株式会社
燃料電池用触媒インクの製造方法
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ