TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134328
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032172
出願日
2024-03-04
発明の名称
小型電動車両
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60L
15/20 20060101AFI20250909BHJP(車両一般)
要約
【課題】カーブ走行時に車輪速差制御を実行する小型電動車両において、左側の駆動輪の回転速度と右側の駆動輪の回転速度との差を適切に設定する。
【解決手段】小型電動車両(10)は、左側の駆動輪(12)と右側の駆動輪(12)とを備え、カーブ走行時に左側の駆動輪の回転速度と右側の駆動輪の回転速度とに回転速度差を生じさせる車輪速差制御を実行する。小型電動車両は、車輪速差制御において回転速度差を設定するパラメータを、小型電動車両の車速に応じて可変とする。
【選択図】 図1
特許請求の範囲
【請求項1】
左側の駆動輪(12)と右側の駆動輪(12)とを備え、カーブ走行時に前記左側の駆動輪の回転速度と前記右側の駆動輪の回転速度とに回転速度差を生じさせる車輪速差制御を実行する小型電動車両(10,110)であって、
前記車輪速差制御において前記回転速度差を設定するパラメータを、前記小型電動車両の車速に応じて可変とする、小型電動車両。
続きを表示(約 810 文字)
【請求項2】
前記パラメータは、前記回転速度差を増幅するゲインであり、
前記車速が高いほど前記ゲインを大きくする、請求項1に記載の小型電動車両。
【請求項3】
前記車速の上昇に伴って前記ゲインを連続的に大きくする、請求項2に記載の小型電動車両。
【請求項4】
前記車速の上昇に伴って前記ゲインを段階的に大きくする、請求項2に記載の小型電動車両。
【請求項5】
前記小型電動車両が搬送する物体の重量に応じて前記パラメータを可変とする、請求項1~4のいずれか1項に記載の小型電動車両。
【請求項6】
前記パラメータは、前記回転速度差を増幅するゲインであり、
前記物体の重量が大きいほど前記ゲインを大きくする、請求項5に記載の小型電動車両。
【請求項7】
前記小型電動車両に前記物体を積載する場合と、前記物体を積載した牽引車両を前記小型電動車両が牽引する場合とで、前記パラメータを可変とする、請求項5に記載の小型電動車両。
【請求項8】
前記小型電動車両が走行するカーブの曲率に応じて前記パラメータを可変とする、請求項1~4のいずれか1項に記載の小型電動車両。
【請求項9】
前記パラメータは、前記回転速度差を増幅するゲインであり、
前記カーブの曲率が大きいほど前記ゲインを大きくする、請求項8に記載の小型電動車両。
【請求項10】
前記パラメータは、前記回転速度差を増幅するゲインであり、
前記ゲインは、前記右側の駆動輪の回転速度を決める第1ゲインと、前記左側の駆動輪の回転速度を決める第2ゲインとを含み、
前記第1ゲイン及び前記第2ゲインを個別に可変とする、請求項1~4のいずれか1項に記載の小型電動車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、小型電動車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば、インバータにより走行モータを駆動する走行車であって、走行車の目標速度のパターンを記憶するための手段と、走行モータの制御ゲインを速度毎に記憶するための手段とを設けると共に、記憶した目標速度と速度毎の制御ゲインとによりインバータを制御するための手段を設けた走行車がある(特許文献1参照)。特許文献1に記載の走行車によれば、走行車の速度により変化するゲインで制御することにより、目標速度に従って走行させることができる。
【先行技術文献】
【特許文献】
【0003】
特開2011-93676号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、走行車(小型電動車両)では、左側の駆動輪の回転速度と右側の駆動輪の回転速度とに差を生じさせる車輪速差制御により、カーブを走行することが多い。カーブ走行時の車輪速差制御では、左側の駆動輪の回転速度と右側の駆動輪の回転速度との差を適切に設定しないと、車両が左右にぶれたり車両が目標軌道から外れたりするおそれがある。特許文献1に記載の走行車では、車輪速差制御によるカーブ走行を考慮しておらず、未だ改善の余地がある。
【0005】
本発明は、上記課題を解決するためになされたものであり、その主たる目的は、カーブ走行時に車輪速差制御を実行する小型電動車両において、左側の駆動輪の回転速度と右側の駆動輪の回転速度との差を適切に設定することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するための第1の手段は、
左側の駆動輪(12)と右側の駆動輪(12)とを備え、カーブ走行時に前記左側の駆動輪の回転速度と前記右側の駆動輪の回転速度とに回転速度差を生じさせる車輪速差制御を実行する小型電動車両(10,110)であって、
前記車輪速差制御において前記回転速度差を設定するパラメータを、前記小型電動車両の車速に応じて可変とする。
【0007】
上記構成によれば、小型電動車両は、左側の駆動輪と右側の駆動輪とを備え、カーブ走行時に前記左側の駆動輪の回転速度と前記右側の駆動輪の回転速度とに回転速度差を生じさせる車輪速差制御を実行する。このため、例えば目標軌道が左に曲がっている場合において、左側の駆動輪の回転速度を右側の駆動輪の回転速度よりも遅くすることにより、小型電動車両は左に曲がることができる。
【0008】
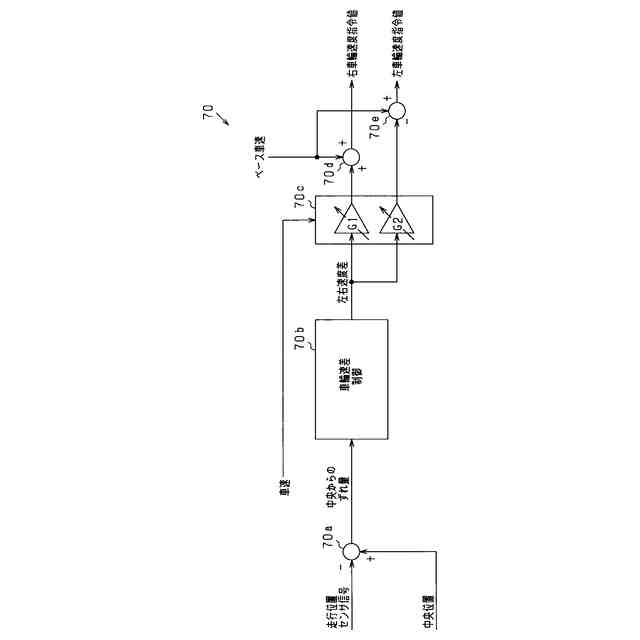
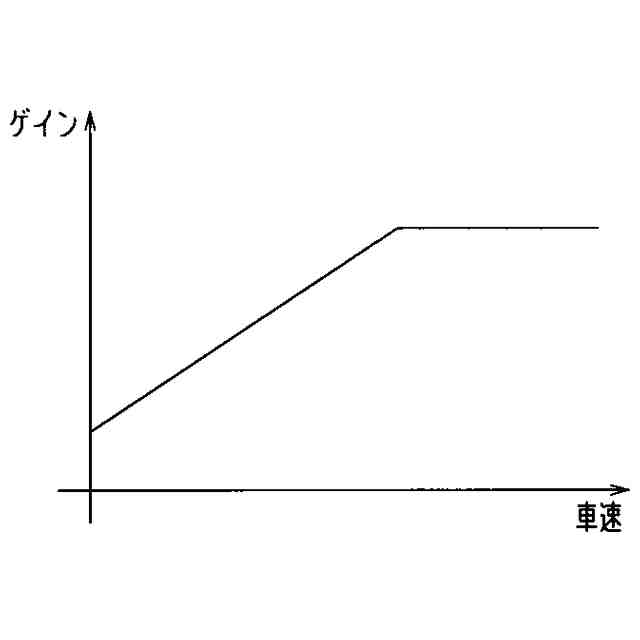
ここで、車輪速差制御においては、左側の駆動輪の回転速度と右側の駆動輪の回転速度との回転速度差(以下、「左右駆動輪の回転速度差」という)を適切に設定しないと、カーブ走行において小型電動車両が左右にぶれたり小型電動車両が目標軌道から外れたりするおそれがある。例えば、車輪速差制御において左右駆動輪の回転速度差の変化率が車速に対して大きすぎる場合は、小型電動車両が左右にぶれるおそれがある。一方、車輪速差制御において左右駆動輪の回転速度差の変化率が車速に対して小さすぎる場合は、小型電動車両が目標軌道から外側へ外れるおそれがある。この点、小型電動車両は、前記車輪速差制御において前記回転速度差を設定するパラメータを、前記小型電動車両の車速に応じて可変とする。したがって、車輪速差制御において左右駆動輪の回転速度差を適切に設定しやすくなり、ひいてはカーブ走行時に小型電動車両の目標軌道への追従性を向上させることができる。
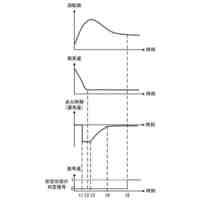
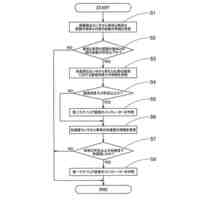
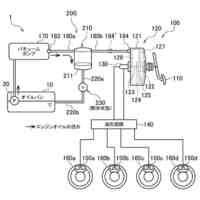
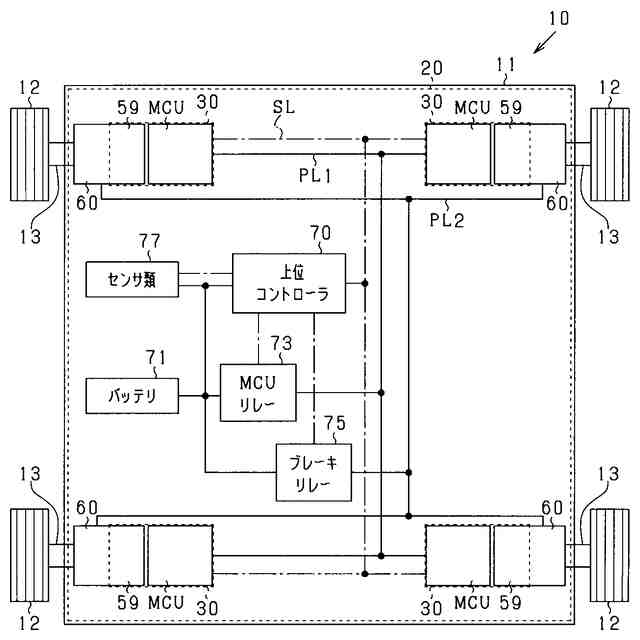
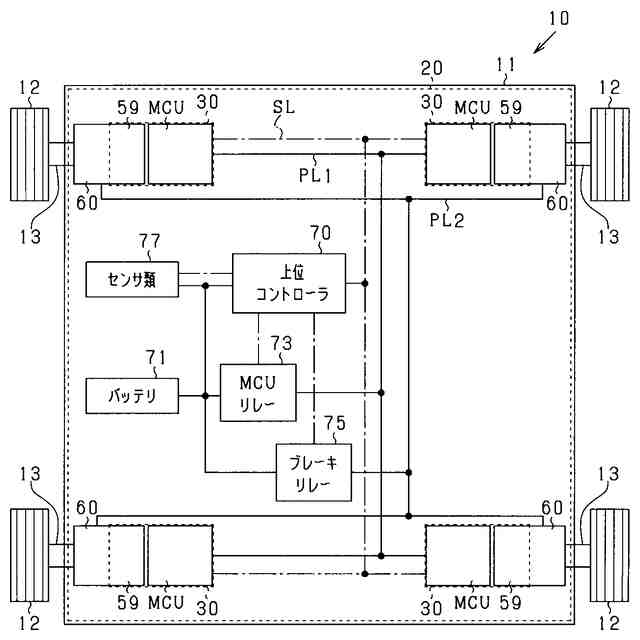
【図面の簡単な説明】
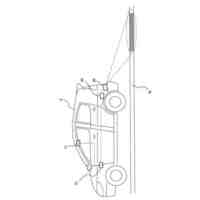
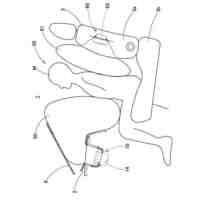
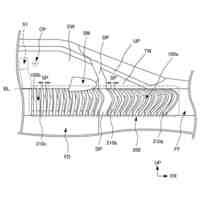
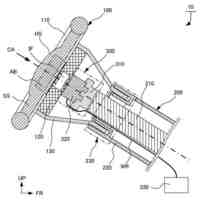
【0009】
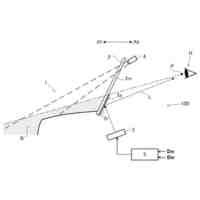
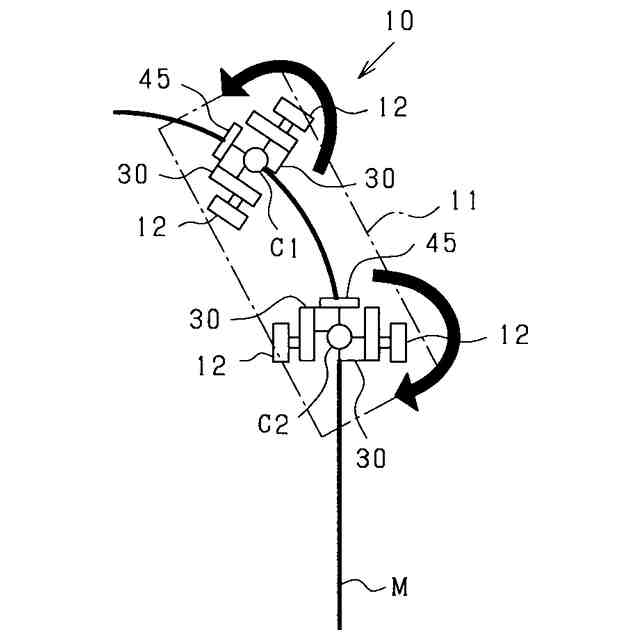
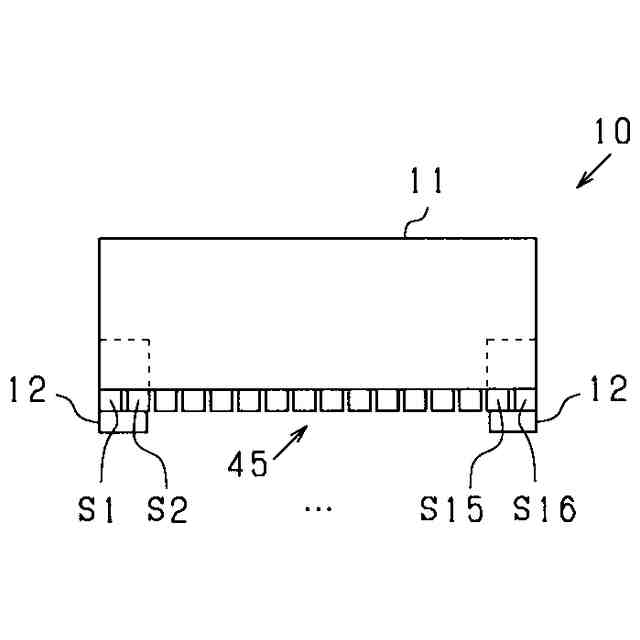
無人搬送車の模式図。
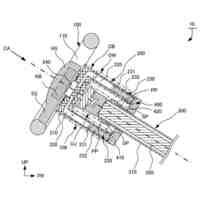
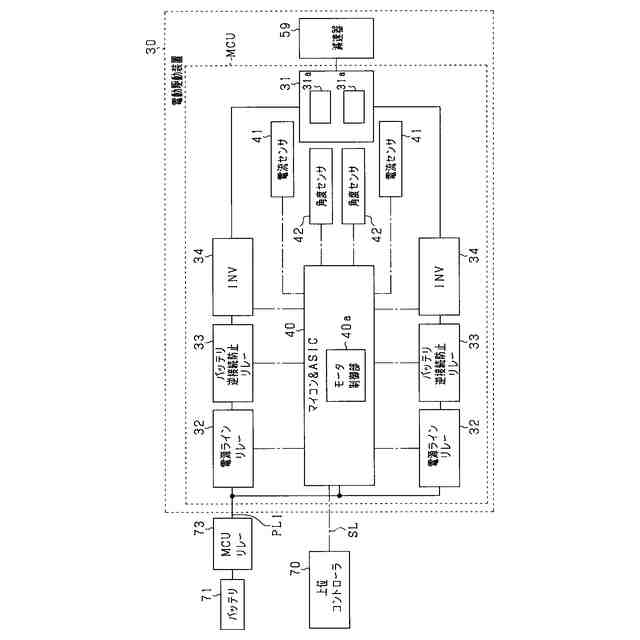
電動駆動装置及びその周辺構成を示すブロック図。
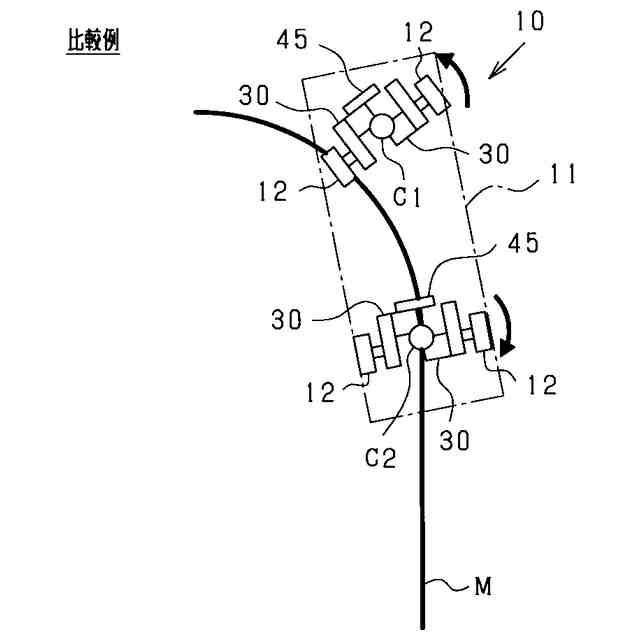
左右駆動輪の回転速度差が適切な場合の高車速でのカーブ走行の態様を示す模式図。
無人搬送車の正面を示す模式図。
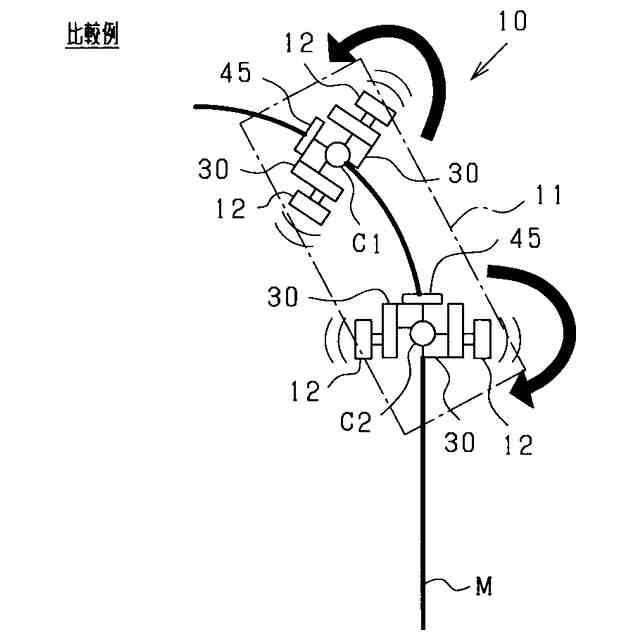
左右駆動輪の回転速度差が過剰な場合の低車速でのカーブ走行の態様を示す模式図。
左右駆動輪の回転速度差が不足の場合の高車速でのカーブ走行の態様を示す模式図。
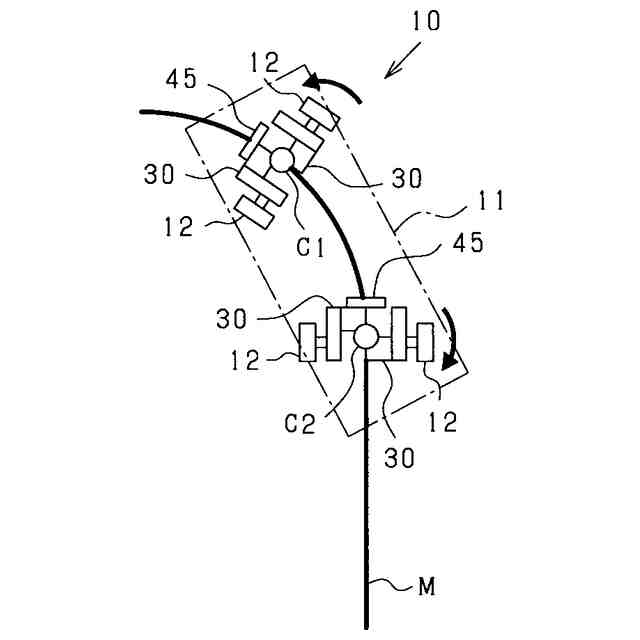
左右駆動輪の回転速度差が適切な場合の低車速でのカーブ走行の態様を示す模式図。
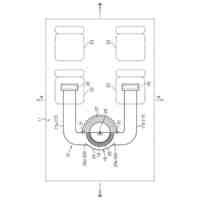
車輪速差制御におけるゲイン変更の一例を示すブロック図。
車速とゲインとの関係を示すグラフ。
車速とゲインとの関係の変更例を示すグラフ。
車輪速差制御におけるゲイン変更の他の例を示すブロック図。
車速と物体重量とゲインとの関係を示すマップ。
車速とカーブ曲率とゲインとの関係を示すマップ。
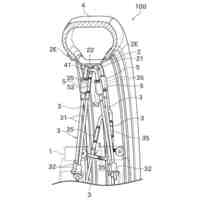
電動車椅子の模式図。
【発明を実施するための形態】
【0010】
以下、無人搬送車(小型電動車両)に具現化した一実施形態について、図面を参照しつつ説明する。無人搬送車は、例えば工場や倉庫等において磁気テープ(磁気ライン)により誘導されるAGV(Automatic Guided Vehicle)である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
前輪キャスター
1か月前
個人
タイヤ脱落防止構造
1か月前
日本精機株式会社
表示装置
1か月前
個人
マスタシリンダ
3日前
株式会社ニフコ
収納装置
20日前
日本精機株式会社
車載表示装置
11日前
株式会社ニフコ
照明装置
1か月前
日本精機株式会社
車室演出装置
1か月前
日本精機株式会社
車両用投影装置
10日前
井関農機株式会社
作業車両
10日前
スズキ株式会社
運転支援装置
1か月前
ダイハツ工業株式会社
変速機
1か月前
帝人株式会社
衝撃吸収構造体
26日前
個人
自動車の非常ブレーキアシスト
26日前
エムケー精工株式会社
車両処理装置
27日前
日本化薬株式会社
ガス発生器
18日前
ダイハツ工業株式会社
変速機
1か月前
日本化薬株式会社
ガス発生器
12日前
ダイハツ工業株式会社
変速機
1か月前
ダイハツ工業株式会社
変速機
1か月前
個人
段差通過を容易にする車輪構造
1か月前
豊田合成株式会社
乗員保護装置
1か月前
トヨタ自動車株式会社
制御装置
24日前
トヨタ自動車株式会社
電動車両
1か月前
株式会社SUBARU
車体構造
5日前
豊田合成株式会社
乗員保護装置
1か月前
トヨタ紡織株式会社
車両
24日前
カワサキモータース株式会社
車輪
1か月前
スズキ株式会社
ブレーキシステム
11日前
株式会社SeaDog
ロールバー
10日前
ダイハツ工業株式会社
電池搭載構造
1か月前
スズキ株式会社
車両前部構造
10日前
株式会社SUBARU
乗員保護装置
10日前
株式会社SUBARU
乗員保護装置
5日前
トヨタ紡織株式会社
送風装置
19日前
スズキ株式会社
車両用バンパ
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ