TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025121036
公報種別
公開特許公報(A)
公開日
2025-08-19
出願番号
2024016199
出願日
2024-02-06
発明の名称
運転支援装置
出願人
スズキ株式会社
代理人
個人
主分類
B60W
30/14 20060101AFI20250812BHJP(車両一般)
要約
【課題】運転者の意図しない加減速を抑制することを目的とする。
【解決手段】本発明の車両は、前走車がない場合は目標車速に従って定速走行し、前走車がある場合は所定車間距離を維持して追従走行を行うACC機能を有する。運転支援装置10は、ACC機能が実行され、所定条件を満たす場合、自車両の運転者による自車両と前走車との車間距離に応じた加減速操作を学習した結果に基づいて車両を走行させるように制御する制御部21を備える。自車両の運転者による自車両と前走車との車間距離に応じた加減速操作を学習した結果に基づいて車両を走行させることから、運転者の意図しない加減速を抑制することができる。
【選択図】図1
特許請求の範囲
【請求項1】
前走車がない場合は目標車速に従って定速走行し、前走車がある場合は所定車間距離を維持して追従走行を行うACC機能を有する車両の運転支援装置であって、
前記ACC機能が実行され、所定条件を満たす場合、自車両の運転者による自車両と前走車との車間距離に応じた加減速操作を学習した結果に基づいて車両を走行させるように制御する制御部を備えることを特徴とする運転支援装置。
続きを表示(約 260 文字)
【請求項2】
前記制御部は、
前走車が許容一定車速内で走行していない場合、前記前走車の車速に基づいて自車両の目標車速を算出し、算出した目標車速で定速走行させるように制御することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記制御部は、
前記ACC機能が実行され、自車両の前方に他車両の急な割り込みが発生した場合、車両製造時に予め設定された設定値に基づいて自車両を走行させる通常のACC制御を実行するように制御することを特徴とする請求項1または2に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置に関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、アダプティブ・クルーズ・コントロール(Adaptive Cruise Control、以下ACCという)機能を備えた車両が知られている。
特許文献1には、運転者の設定した車速指令を保つように車両を制御する設定車速モードと前方の物体との距離を車間距離指令値に保つように車両を制御する追従モードの2つの制御モードに対応して自車両の駆動機構を制御するクルーズコントロール手段を有する自動車の走行制御装置が開示されている。クルーズコントロール手段は、追従モード時に、今回測定した先行車との車間距離が前回測定した車間距離より所定値だけ遠い場合には、制御モードを追従モードから、現在の車速を車速指令とする設定車速モードに遷移させる。さらに、クルーズコントロール手段は、先行車との車間距離が所定距離より短くなるか先行車が自車に近づいてくると設定車速モードから追従モードに遷移させる。
【先行技術文献】
【特許文献】
【0003】
特開2000-85406号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術ではACC機能が実行されている場合に、自車両の前方から前走車がいなくなったり、自車両の前方に他車両が入ってきたりすると、自動制御により、自車両の運転者が普段では行わないような運転者の意図しない加減速を行ってしまうという問題がある。
【0005】
本発明は、上述したような問題点に鑑みてなされたものであり、運転者の意図しない加減速を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、前走車がない場合は目標車速に従って定速走行し、前走車がある場合は所定車間距離を維持して追従走行を行うACC機能を有する車両の運転支援装置であって、前記ACC機能が実行され、所定条件を満たす場合、自車両の運転者による自車両と前走車との車間距離に応じた加減速操作を学習した結果に基づいて車両を走行させるように制御する制御部を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、運転者の意図しない加減速を抑制することができる。
【図面の簡単な説明】
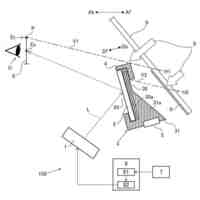
【0008】
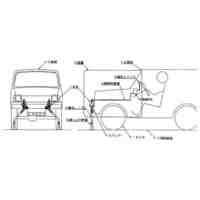
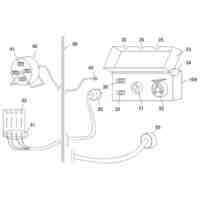
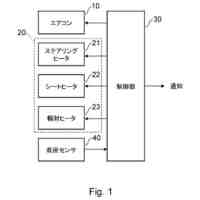
運転支援装置の構成の一例を示す図である。
運転支援装置による処理の一例を示すフローチャートである。
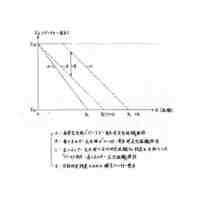
加減速操作を学習した学習データの一部の例を示す図である。
【発明を実施するための形態】
【0009】
本発明に係る実施形態の車両は、前走車がない場合は目標車速に従って定速走行し、前走車がある場合は所定車間距離を維持して追従走行を行うACC機能を有する。運転支援装置10は、ACC機能が実行され、所定条件を満たす場合、自車両の運転者による自車両と前走車との車間距離に応じた加減速操作を学習した結果に基づいて車両を走行させるように制御する制御部21を備える。自車両の運転者による自車両と前走車との車間距離に応じた加減速操作を学習した結果に基づいて車両を走行させることから、運転者の意図しない加減速を抑制することができる。
【実施例】
【0010】
以下、本発明に係る運転支援装置10について図面を参照して説明する。
図1は、運転支援装置10の構成を示す図である。
運転支援装置10は、運転者が乗車する車両に搭載される。なお、運転支援装置10が搭載される車両は、一般的な車両が備える機器を備えており、当該機器の図示および説明を適宜、省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
25日前
個人
警告装置
4か月前
個人
車窓用防虫網戸
3か月前
個人
小型EVシステム
4か月前
個人
ルーフ付きトライク
16日前
日本精機株式会社
ケース
4か月前
個人
ホイルのボルト締結
1か月前
個人
車輪清掃装置
2か月前
個人
車両通過構造物
26日前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
23日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
6日前
日本精機株式会社
表示装置
23日前
日本精機株式会社
表示装置
23日前
井関農機株式会社
作業車両
2か月前
個人
アクセルのソフトウェア
1か月前
個人
車両用スリップ防止装置
2か月前
個人
キャンピングトレーラー
2か月前
個人
乗合路線バスの客室装置
1か月前
個人
ワイパーゴム性能保持具
3か月前
個人
ブレーキシステム
4か月前
個人
車載小物入れ兼雨傘収納具
1か月前
株式会社豊田自動織機
産業車両
20日前
個人
円湾曲ホイール及び球体輪
1か月前
日本精機株式会社
車載表示装置
1か月前
株式会社クラベ
ヒータユニット
3か月前
個人
音声ガイド、音声サービス
1か月前
株式会社ニフコ
照明装置
4日前
井関農機株式会社
収穫作業車両
3か月前
横浜ゴム株式会社
タイヤ
4か月前
株式会社ニフコ
保持装置
1か月前
個人
自動車ドア開度規制ベルト
4か月前
トヨタ自動車株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ