TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025137741
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2025123384,2024074401
出願日
2025-07-23,2020-09-30
発明の名称
作業機械および作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/24 20060101AFI20250911BHJP(水工;基礎;土砂の移送)
要約
【課題】誤検出による警報を低減することが可能な作業機械を提供する。
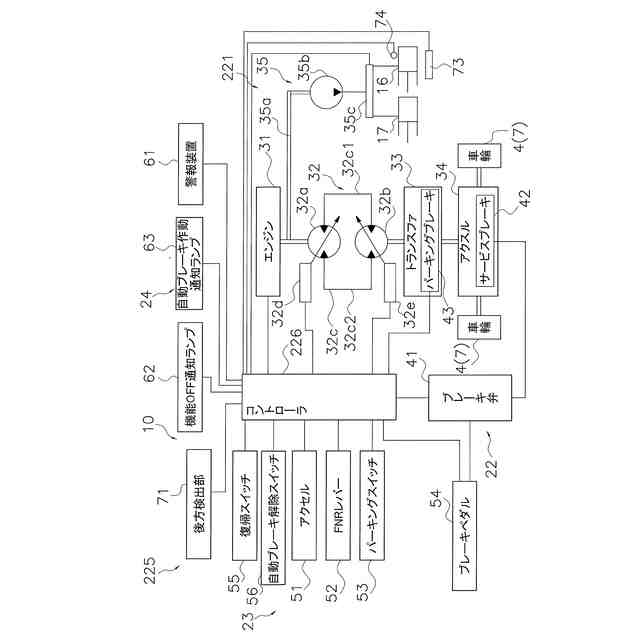
【解決手段】作業機械の制御部は、走行体の駆動による前進時に作業機の動作に基づいて掻き上げ作業状態であるか否かを判定し、掻き上げ作業状態であると判定した場合に、後進時に前記後方検出部によって後方の物体が検出されたときの前記物体との接近を抑制する制御を変更する制御部と、を備える。制御部は、ブームシリンダのボトム圧と作業機の高さに基づいて、掻き上げ作業状態であるか否かの判定を行う。物体との接近を抑制する前記制御は、第1報知部による報知である。制御の変更は、第1報知部による報知の変更である。
【選択図】図11
特許請求の範囲
【請求項1】
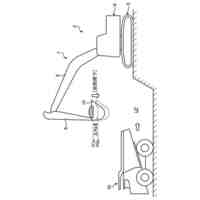
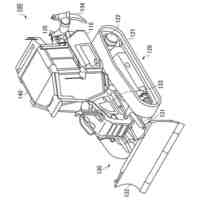
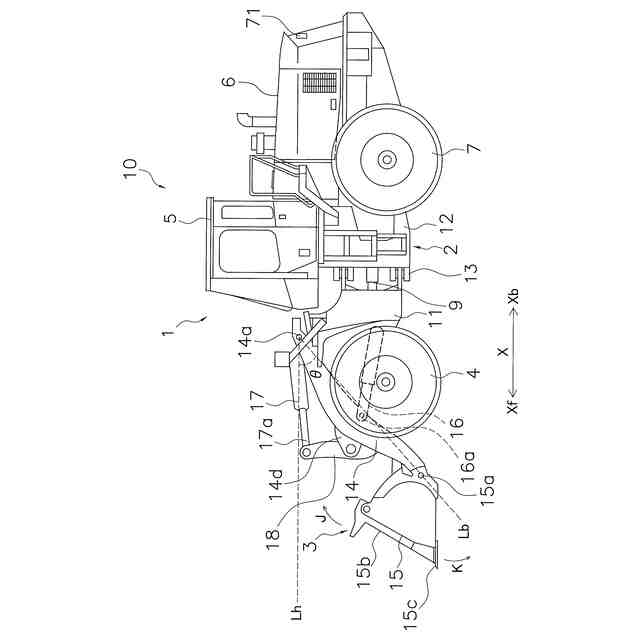
走行体と、前記走行体の前方に配置された作業機と、を有する車両本体と、
前記車両本体の後方の物体を検出する後方検出部と、
前記後方検出部によって前記車両本体の後方に物体を検出したことを報知する第1報知部と、
前記走行体の駆動による前進時に前記作業機の動作に基づいて掻き上げ作業状態であるか否かを判定し、前記掻き上げ作業状態であると判定した場合に、後進時に前記後方検出部によって後方の物体が検出されたときの前記物体との接近を抑制する制御を変更する制御部と、を備え、
前記作業機は、
前記走行体の前部に揺動可能に取り付けられたブームと、
前方に向かって開口が配置されるように前記ブームに接続され、前記ブームに対して駆動するバケットと、
前記ブームを駆動するブームシリンダと、を有し、
前記ブームシリンダのボトム圧を検出するブームボトム圧センサと、
前記作業機の高さを検出する作業機高さ検出部と、を更に備え、
前記制御部は、前記ブームシリンダのボトム圧と前記作業機の高さに基づいて、前記掻き上げ作業状態であるか否かの判定を行い、
前記物体との接近を抑制する前記制御は、前記第1報知部による報知であり、
前記制御の変更は、前記第1報知部による報知の変更である、
作業機械。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、
前記ブームシリンダのボトム圧が第1閾値以上、且つ前記作業機の高さが第2閾値以下の場合に掘削作業状態であると判定し、前記掘削作業状態との判定中に前記作業機の高さが第3閾値より大きいとき、前記掻き上げ作業状態であると判定し、
前記第3閾値における前記作業機の高さが、前記第2閾値における前記作業機の高さよりも高くなるように前記第2閾値および前記第3閾値は設定されている、
請求項1に記載の作業機械。
【請求項3】
前記作業機高さ検出部は、
前記ブームの角度を検出するブーム角度センサを有し、
前記第2閾値および前記第3閾値は、前記ブームの角度として設定されている、
請求項2に記載の作業機械。
【請求項4】
前記制御部は、前進時の場合に、前記掘削作業状態であるか否かを判定し、
前記制御部は、前記車両本体の車輪が前方に向かうように回転していることまたは前記車両本体の前進または後進を設定可能な操作部材が前進の位置に設定されているときに前進時であると検出する、
請求項2に記載の作業機械。
【請求項5】
走行体および作業機を有する車両本体の前記走行体の駆動による前進時に前記作業機の動作に基づいて、掻き上げ作業状態を判定する掻き上げ判定ステップと、
前記車両本体の後方の物体を検出する後方検出ステップと、
前記掻き上げ作業状態であると判定した場合に、後進時に前記後方検出ステップによって後方の物体が検出されたときの前記物体との接近を抑制する制御を変更する制御ステップと、を備え、
前記作業機は、
前記走行体の前部に揺動可能に取り付けられたブームと、
前方に向かって開口が配置されるように前記ブームに接続され、前記ブームに対して駆動するバケットと、
前記ブームを駆動するブームシリンダと、を有し、
前記ブームシリンダのボトム圧を検出するブームボトム圧検出ステップと、
前記作業機の高さを検出する作業機高さ検出ステップと、を更に備え、
前記制御ステップは、前記ブームシリンダのボトム圧と前記作業機の高さに基づいて、前記掻き上げ作業状態であるか否かの判定を行い、
前記物体との接近を抑制する前記制御は、前記車両本体の後方に物体を検出したことの報知であり、
前記制御の変更は、前記報知の変更である、
作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械および作業機械の制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
作業機械の一例であるホイールローダにおいて、後方の障害物を検出し自動で停止する自動停止システムが提案されている。
【0003】
たとえば、非特許文献1では、ホイールローダにステレオカメラを設置し、後進時に障害物を認識した場合にフットブレーキを動作させている。
【先行技術文献】
【非特許文献】
【0004】
“NIPPO/ホイールローダー自動停止システム開発/ステレオカメラで障害物対応”2016年7月8日3面、日刊建設工業新聞オンライン、インターネット<URL: https://www.decn.co.jp/?p=72204>
【発明の概要】
【発明が解決しようとする課題】
【0005】
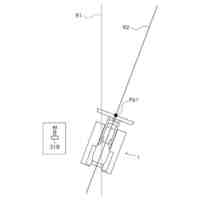
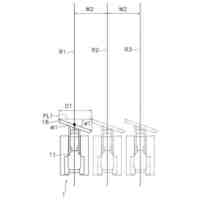
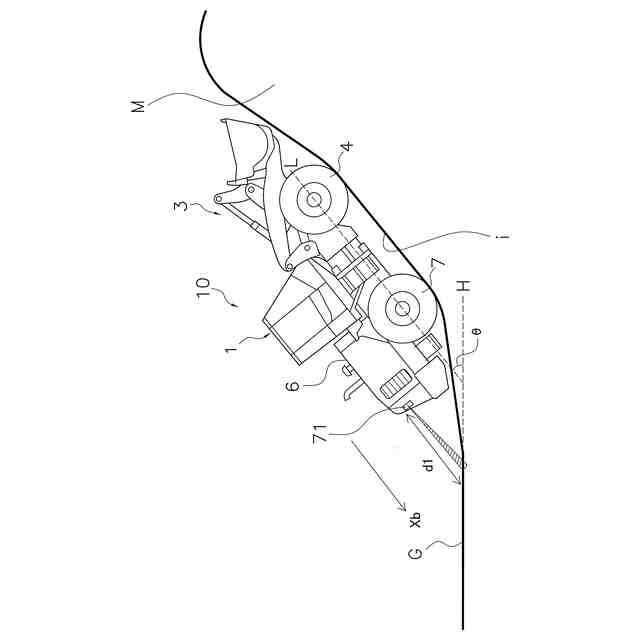
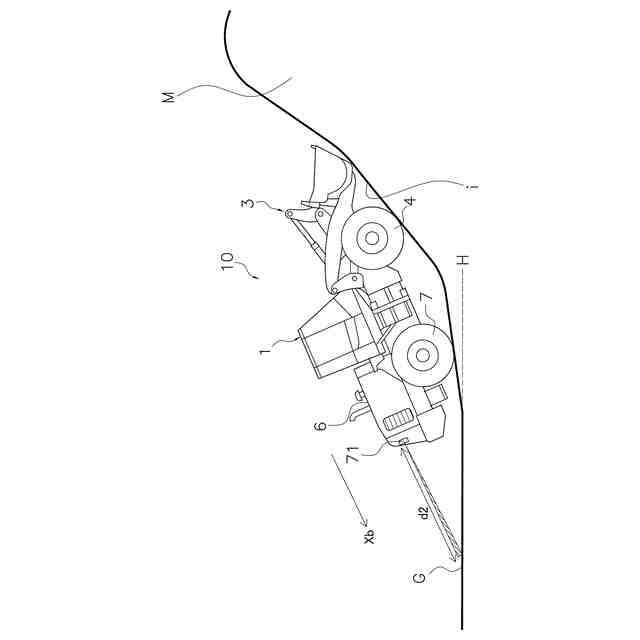
しかしながら、ホイールローダでは土砂を積み上げる掻き上げ作業が行われることがあり、ホイールローダは土砂の山の傾斜を登って掻き上げ作業を行う。このような場合、従来の自動停止システムでは後進時に地面を障害物として検出して障害物警報を出力するためオペレータには煩わしかった。
【0006】
本開示は、誤検出による警報を低減することが可能な作業機械および作業機械の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
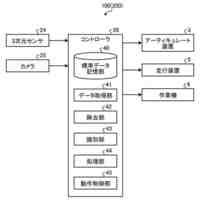
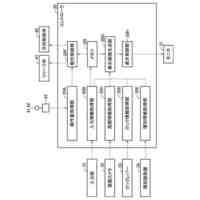
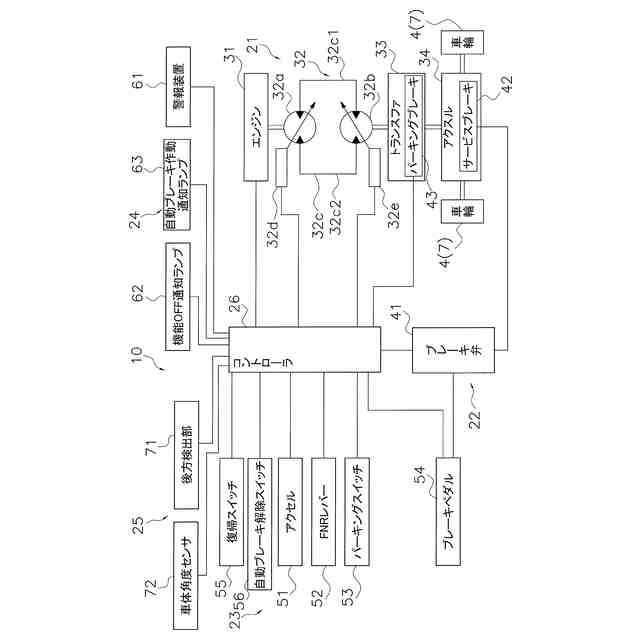
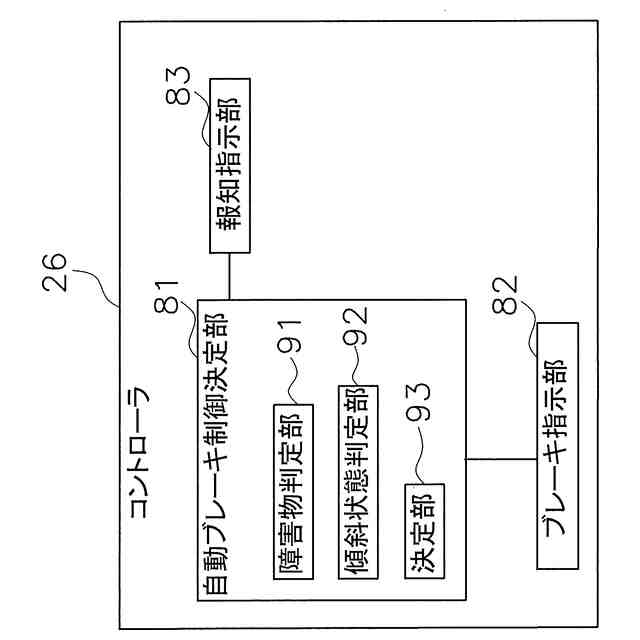
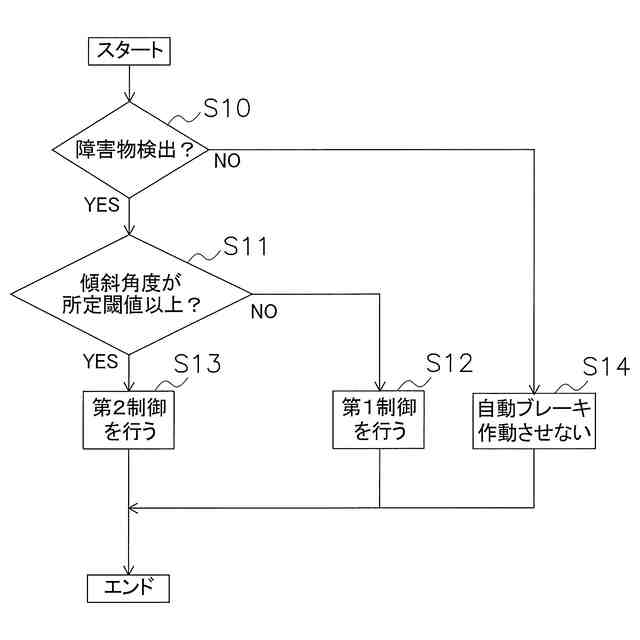
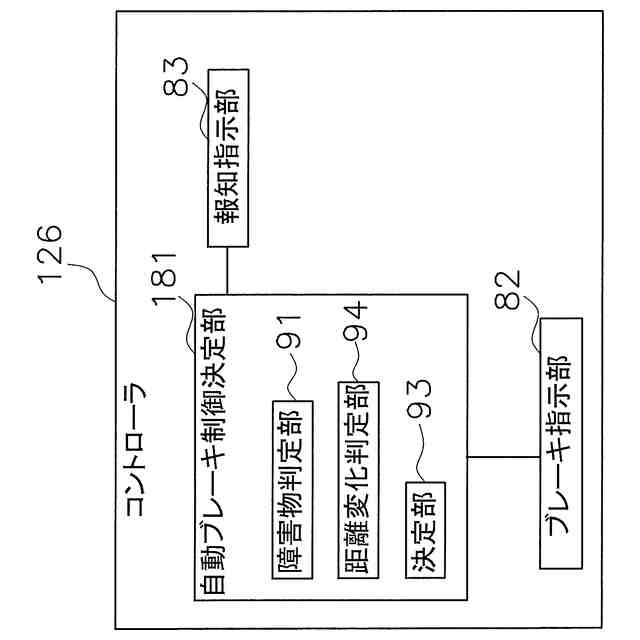
本態様に係る作業機械は、車両本体と、後方検出部と、傾斜状態検出部と、制御部と、を備える。後方検出部は、車両本体の後方の物体を検出する。傾斜状態検出部は、車両本体の傾斜状態を検出する。制御部は、傾斜状態検出部で検出された車両本体の傾斜状態に基づいて、後方検出部の検出に対応した制御を決定する。
【0008】
本態様に係る作業機械は、車両本体と、後方検出部と、第1報知部と、制御部と、を備える。後方検出部は、車両本体の後方の物体を検出し、車両本体の後方の物体との距離を計測する。第1報知部は、後方検出部によって車両本体の後方に物体を検出したことを報知する。制御部は、後方検出部で計測された車両本体から前記物体までの距離の変化に基づいて、第1報知部による報知の変更を行う。
【0009】
本態様に係る作業機械の制御方法は、後方検出ステップと、傾斜状態検出ステップと、制御ステップと、を備える。後方検出ステップは、車両本体の後方の物体を検出する。傾斜状態検出ステップは、車両本体の傾斜状態を検出する。制御ステップは、傾斜状態検出ステップで検出された車両本体の傾斜状態に基づいて、後方検出ステップの検出に対応した制御を決定する。
【0010】
本態様に係る作業機械の制御方法は、後方検出ステップと、制御ステップと、を備える。後方検出ステップは、車両本体の後方の物体を検出し、車両本体の後方の物体との距離を計測する。制御ステップは、計測された車両本体から物体までの距離の変化に基づいて、車両本体の後方に物体を検出したことの報知の変更を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
21日前
株式会社小松製作所
モータ
21日前
株式会社小松製作所
作業車両
2日前
株式会社小松製作所
作業機械
29日前
株式会社小松製作所
作業機械
22日前
株式会社小松製作所
作業車両
2日前
株式会社小松製作所
路面整備システム
21日前
株式会社小松製作所
プラネタリギヤ機構
20日前
株式会社小松製作所
回転電機及び作業機械
1か月前
株式会社小松製作所
識別システム及び識別方法
1か月前
株式会社小松製作所
モータ及びモータの製造方法
21日前
株式会社小松製作所
ロータ、回転電機及び作業機械
1か月前
株式会社小松製作所
システム、作業車両および方法
22日前
株式会社小松製作所
システム、作業車両および方法
22日前
株式会社小松製作所
ステータ、回転電機及び作業機械
1か月前
株式会社小松製作所
作業機械、及び、トランスファ装置
1か月前
株式会社小松製作所
表示システム、表示方法及び作業機械
1か月前
トヨタ自動車株式会社
運行管理装置
5日前
トヨタ自動車株式会社
運行管理装置
5日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
1か月前
トヨタ自動車株式会社
車両走行管理装置
5日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
28日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
21日前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
1か月前
株式会社小松製作所
産業機械の熱変位補正装置及び熱変位補正方法
1か月前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
21日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
21日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
21日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
5日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
21日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
29日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
2日前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
今日
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ