TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139842
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024038895
出願日
2024-03-13
発明の名称
非接触包囲型ロボット
出願人
株式会社ジザイエ
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
11/00 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ユーザの自然な動作を妨げずに利用することができる非接触包囲型ロボットを提供する。
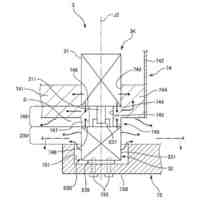
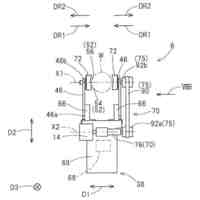
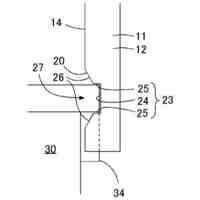
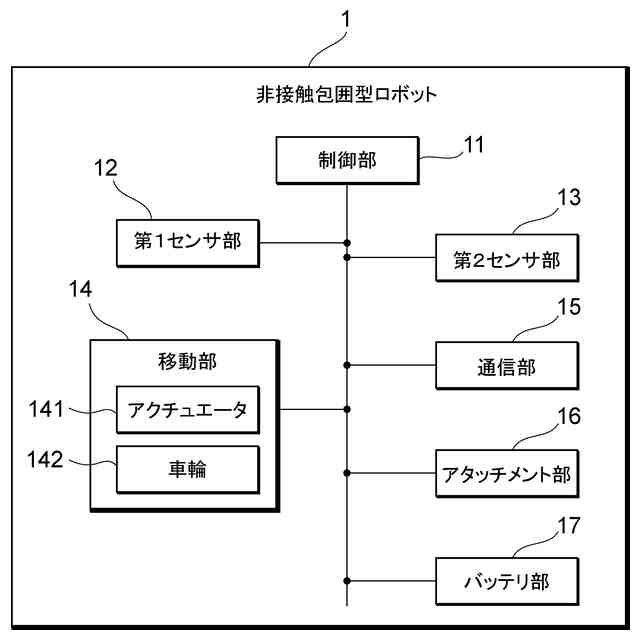
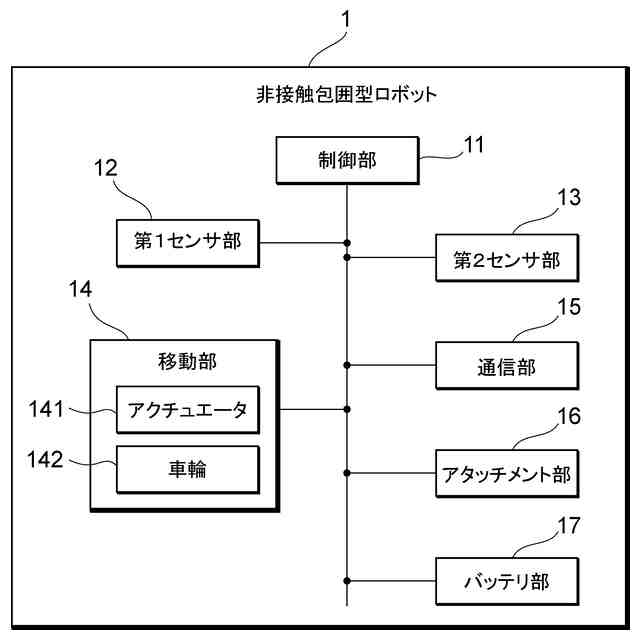
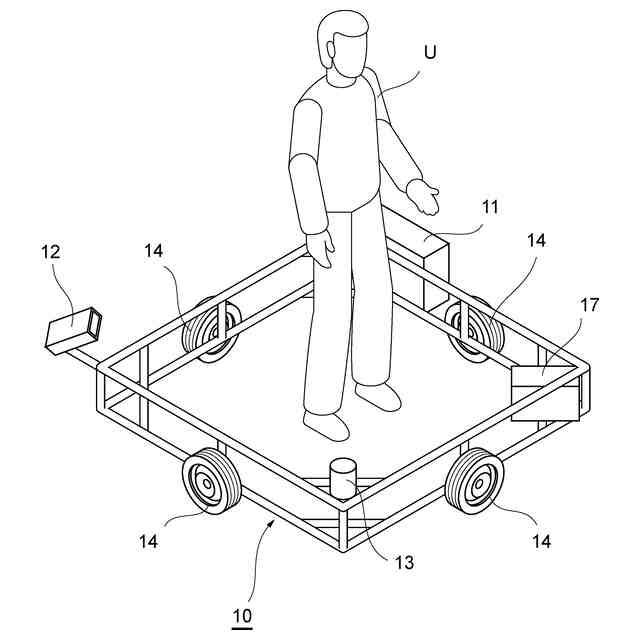
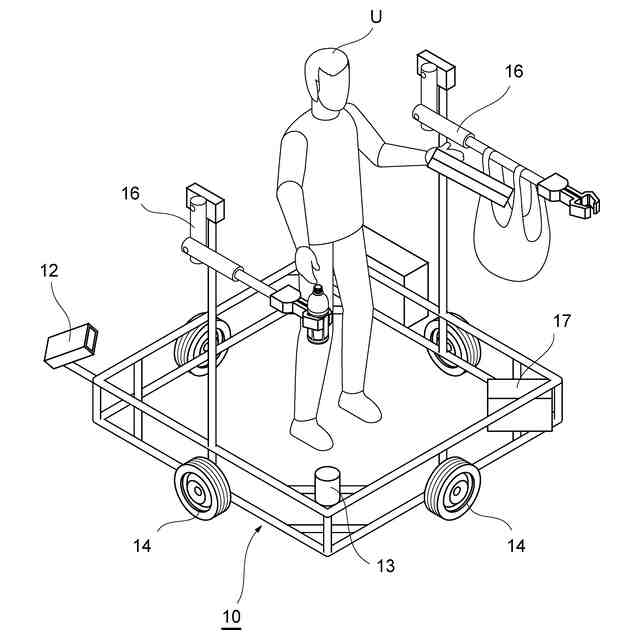
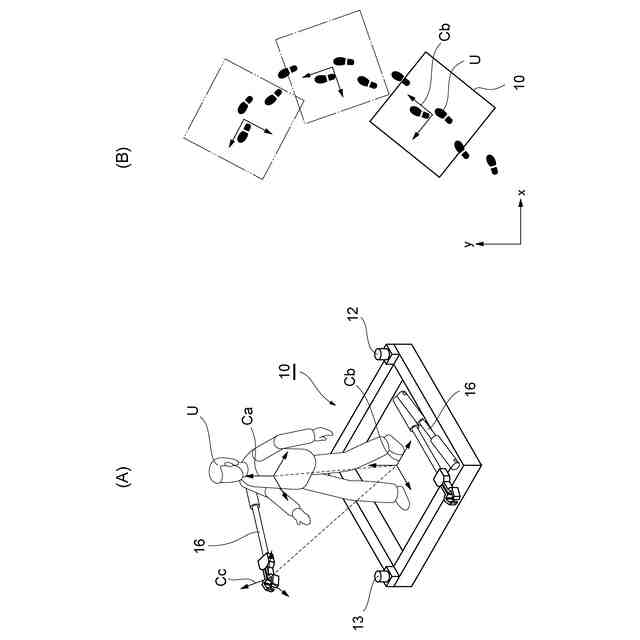
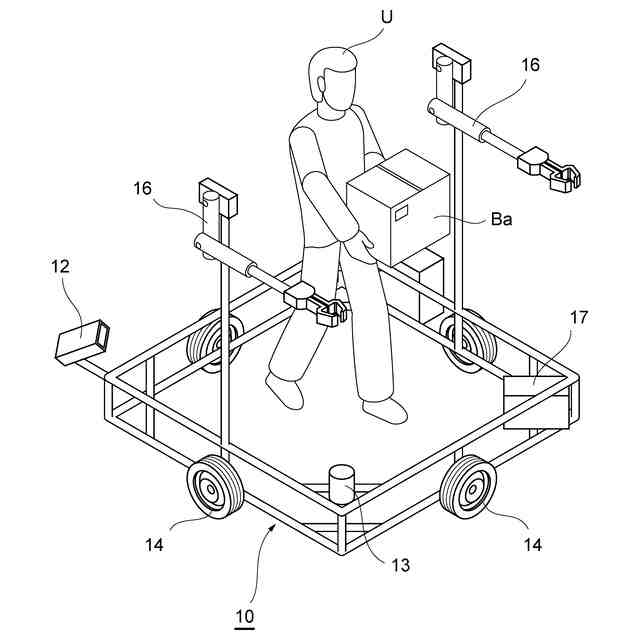
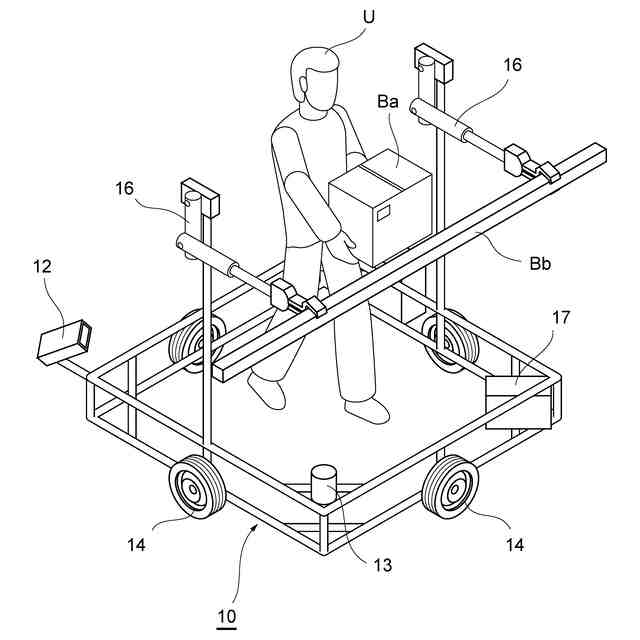
【解決手段】非接触包囲型ロボット1は、内部に位置するユーザと接触せずに、当該ユーザの周囲の少なくとも一部を包囲可能な筐体と、筐体を移動させる移動部14と、筐体に取り付け可能な複数のセンサと、複数のセンサの測定値に基づいて、筐体がユーザの動作に追従して移動するように移動部14を制御する制御部11と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
内部に位置するユーザと接触せずに、当該ユーザの周囲の少なくとも一部を包囲可能な筐体と、
前記筐体を移動させる移動部と、
前記筐体に取り付け可能な複数のセンサと、
前記センサの測定値に基づいて、前記筐体が前記ユーザの動作に追従して移動するように前記移動部を制御する制御部と、
を備える非接触包囲型ロボット。
続きを表示(約 630 文字)
【請求項2】
前記センサは、前記ユーザの姿勢を測定するための第1センサと、前記ユーザ及び前記筐体の周辺環境を測定するための第2センサと、を含む、
請求項1記載の非接触包囲型ロボット。
【請求項3】
前記制御部は、前記ユーザを基準にして定まる座標系と前記筐体を基準にして定まる座標系とを対応付けた共通の座標系により表される前記ユーザの位置及び前記筐体の位置に基づいて、前記移動部を制御する、
請求項1記載の非接触包囲型ロボット。
【請求項4】
前記移動部は、2つ以上の車輪と、当該車輪を駆動するアクチュエータと、を含む、
請求項1記載の非接触包囲型ロボット。
【請求項5】
前記筐体により囲まれて形成される空間は、前記ユーザの歩行動作を妨げない大きさである、
請求項1記載の非接触包囲型ロボット。
【請求項6】
外部の装置と通信するための通信部を、さらに備え、
前記通信部は、前記センサの測定値を外部の装置に送信し、前記移動部を制御するための情報を外部の装置から受信する、
請求項1記載の非接触包囲型ロボット。
【請求項7】
前記筐体は、特定の作業を行うためのアタッチメント部を、さらに含み、
前記制御部は、前記センサの測定値に基づいて、前記アタッチメント部をさらに制御する、
請求項1記載の非接触包囲型ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、非接触包囲型ロボットに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
近年、人間の能力向上を目指す人間拡張分野において、身体能力を強化することや、身体機能を追加することができるウェアラブルロボットが注目されている。ウェアラブルロボットは、ユーザの身体に装着されるため、ユーザの身体に対して定まる座標系に動作の基準点を固定させることができる。したがって、ウェアラブルロボットを装着したユーザは、自身の身体を中心にして直観的に操作することが可能となる。
【0003】
下記特許文献1には、建築現場などで天井パネルのビス打ちなどの作業を行う際にユーザが装着する装着型ロボットが開示されている。特許文献1の装着型ロボットは、装着したユーザと一体となって協調動作を行うため、ユーザが一人で行うことができる作業の質と量を向上させることが可能となる。
【先行技術文献】
【特許文献】
【0004】
特開2022-91459号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、ユーザが装着型ロボットを装着して作業を行うと、装着により生ずる重量や慣性の影響によりユーザの自然な動作が妨げられてしまう。
【0006】
そこで、本発明は、ユーザの自然な動作を妨げずに利用することができる非接触包囲型ロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る非接触包囲型ロボットは、内部に位置するユーザと接触せずに、当該ユーザの周囲の少なくとも一部を包囲可能な筐体と、筐体を移動させる移動部と、筐体に取り付け可能な複数のセンサと、センサの測定値に基づいて、筐体がユーザの動作に追従して移動するように移動部を制御する制御部と、を備える。
【0008】
この態様によれば、ユーザの周囲にある複数のセンサの測定値に基づいて、内部で移動するユーザと接触することなく、ユーザの動きに追従してロボットを移動させることが可能となる。
【0009】
上記態様において、センサは、ユーザの姿勢を測定するための第1センサと、ユーザ及び筐体の周辺環境を測定するための第2センサと、を含むこととしてもよい。
【0010】
この態様によれば、ユーザの姿勢、並びにユーザ及び筐体の周辺環境を監視させ、ユーザの動きに追従するようにロボットを移動させることが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ジザイエ
非接触包囲型ロボット
4日前
個人
折りたたみ工具
25日前
株式会社三協システム
製函機
23日前
川崎重工業株式会社
ロボット
2日前
株式会社不二越
ロボット
1日前
株式会社竹中工務店
補助セット
1日前
株式会社三協システム
移載装置
22日前
CKD株式会社
把持装置
24日前
株式会社不二越
ロボット操作装置
1か月前
太陽パーツ株式会社
アシストスーツ
25日前
SMC株式会社
着脱装置
23日前
株式会社ミクロブ
把持装置
24日前
株式会社不二越
移動ロボットシステム
4日前
株式会社不二越
ロボットシステム
25日前
株式会社不二越
ロボットシステム
22日前
株式会社不二越
エッジ仕上げ装置
14日前
本田技研工業株式会社
装置
7日前
株式会社不二越
垂直多関節ロボット
15日前
トヨタ自動車株式会社
歩行ロボット
28日前
シンフォニアテクノロジー株式会社
搬送装置
4日前
ライオン株式会社
移載システム
16日前
アネックスツール株式会社
ドライバービット
今日
大和ハウス工業株式会社
ねじ回転工具
23日前
ワールド技研株式会社
ロボットセル装置
1日前
セイコーエプソン株式会社
ロボット
今日
シヤチハタ株式会社
マーキング装置
28日前
セイコーエプソン株式会社
ロボット
23日前
NTN株式会社
ハンド
2日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
14日前
セイコーエプソン株式会社
ロボット
1か月前
トヨタ自動車株式会社
ロボットの制御装置
今日
シヤチハタ株式会社
マーキング装置
28日前
株式会社マキタ
電動工具
4日前
株式会社マキタ
電動工具
23日前
株式会社マキタ
電動工具
23日前
NTN株式会社
把持装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ