TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146136
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046761
出願日
2024-03-22
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
9/20 20060101AFI20250926BHJP(水工;基礎;土砂の移送)
要約
【課題】自動的に掘削した対象物を積み込む作業機械において、効率的に移動できない場合があるため、掘削・積込作業を行う際に効率的に移動位置を決定し、迅速に掘削・積込作業を開始することができる作業機械を提供する。
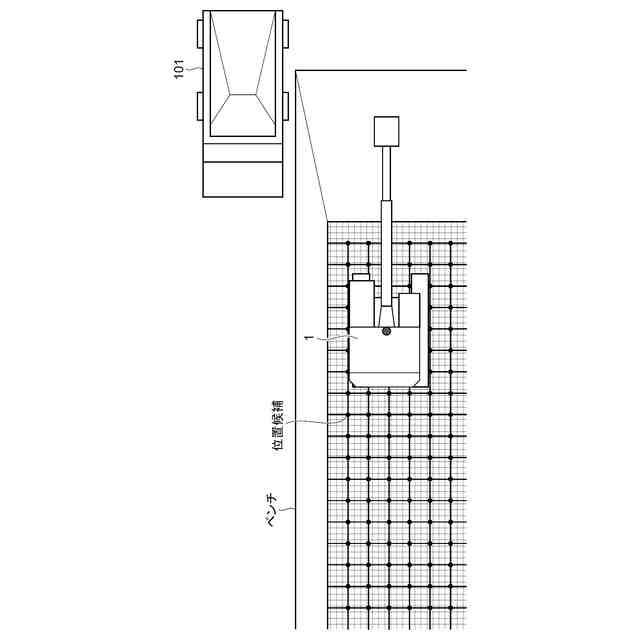
【解決手段】目標積載量と地形形状、作業機械の機体幾何情報に基づいて、位置候補毎の掘削量を演算し、目標積載量以上の掘削量を確保可能な複数の掘削位置候補を演算し、複数の掘削位置候補から適切な作業機械の移動位置を決定する作業機械を提供する。
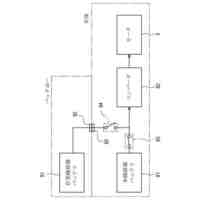
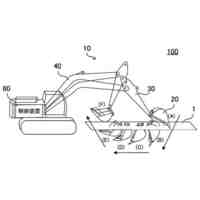
【選択図】図4
特許請求の範囲
【請求項1】
作業装置を有し、前記作業装置により対象物の掘削作業と運搬車両への積込作業を行う作業機械であって、
前記作業機械を走行させる走行アクチュエータと、
前記作業機械の周囲の地形形状を計測する地形計測装置と、
前記運搬車両への目標積載量を取得する目標積載量取得装置と、
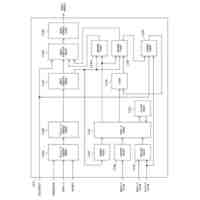
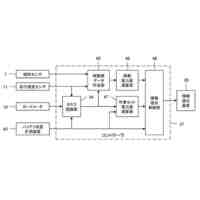
前記作業装置の幾何情報を含む機体幾何情報と、前記地形計測装置により計測された前記地形形状と、前記目標積載量取得装置により取得された前記目標積載量に基づいて、前記掘削及び積込作業を行う時の前記作業機械の移動位置を決定し、前記作業機械を前記移動位置へ移動させるように前記走行アクチュエータを制御するコントローラと、を備え、
前記コントローラは、
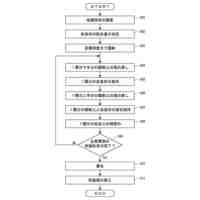
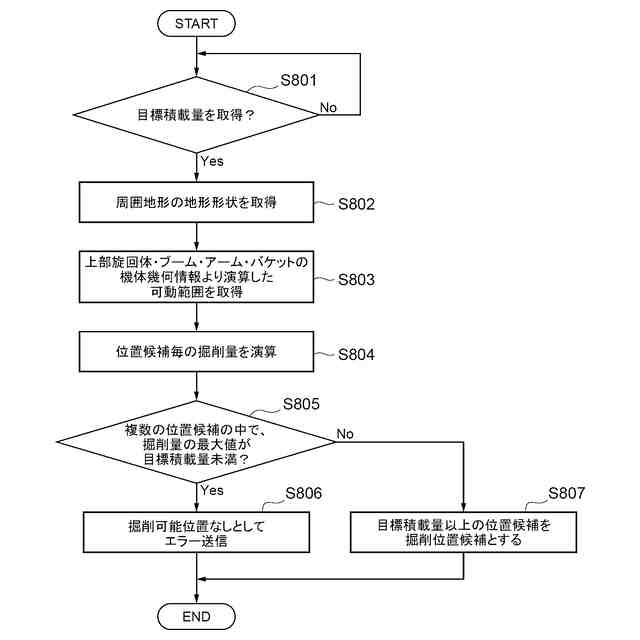
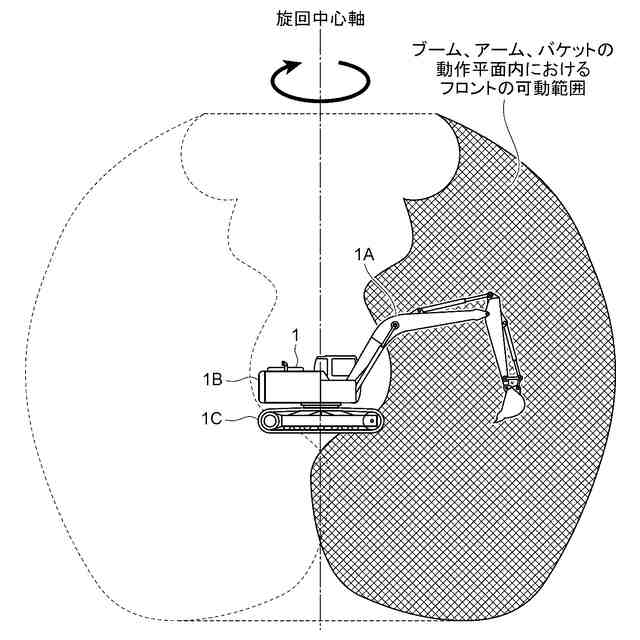
前記地形形状と前記機体幾何情報に基づいて、複数の位置候補において前記掘削作業を行う時の前記対象物の掘削量を演算する掘削量演算部と、
前記掘削量演算部で演算した前記複数の位置候補と前記掘削量の関係に基づいて、前記目標積載量以上の前記掘削量を確保可能な複数の掘削位置候補を演算する掘削位置候補演算部と、
前記掘削位置候補演算部で演算した前記複数の掘削位置候補から前記作業機械の移動位置を決定する移動位置決定部と、
前記移動位置決定部で決定した前記移動位置へ前記作業機械を移動させるように前記走行アクチュエータの制御指令を演算するアクチュエータ制御部と、を備えることを特徴とする作業機械。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の作業機械において、
前記移動位置決定部は、前記複数の掘削位置候補のうち、前記作業機械の現在位置から最も近い位置、又は、前記掘削量が最大となる位置に前記作業機械の移動位置を決定することを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記作業機械は、前記運搬車両の荷台の形状を含む幾何情報を取得する運搬車両幾何情報取得装置をさらに備え、
前記移動位置決定部は、前記複数の掘削位置候補のうち、前記作業装置の可動範囲内に前記荷台がすべて含まれる位置に前記作業機械の移動位置を決定することを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
前記コントローラは、前記地形形状と前記機体幾何情報に基づいて、前記複数の位置候補において掘削可能な地形の幾何中心位置を演算する掘削地形幾何中心位置演算部をさらに備え、
前記移動位置決定部は、前記複数の掘削位置候補のうち、前記掘削可能な地形の幾何中心位置と前記荷台の中心位置の距離が最小になるような位置に前記作業機械の移動位置を決定することを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
前記コントローラは、前記作業機械の予め定めた積込距離を記録する積込距離記録部をさらに備え、
前記移動位置決定部は、前記複数の掘削位置候補のうち、前記掘削可能な地形の幾何中心位置と前記荷台の中心位置から前記積込距離だけ離れた位置の最も近傍の位置に前記作業機械の移動位置を決定することを特徴とする作業機械。
【請求項6】
請求項3に記載の作業機械において、
前記コントローラは、前記積込作業を行う際の前記運搬車両の停止位置の候補である複数の運搬車両移動位置候補を取得し、
前記移動位置決定部は、前記複数の運搬車両移動位置候補に基づいて、前記作業機械の移動位置を決定することを特徴とする作業機械。
【請求項7】
請求項6に記載の作業機械において、
前記コントローラは、前記複数の運搬車両移動位置候補のうち、前記作業機械の移動位置の決定に用いた前記運搬車両移動位置候補を前記運搬車両の移動位置として前記運搬車両に送信することを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動掘削及び積込作業を行う作業機械に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
油圧ショベル等の作業機械において、掘削した土砂等の対象物をダンプトラック等の運搬車両に積み込む作業が知られている。また、このような作業を自動化する技術が知られている。
【0003】
例えば、特許文献1では、掘削対象物を掘削した後に旋回体を旋回させ、掘削対象物を運搬車両に積み込んだ後、旋回体を旋回させて再び掘削を行う作業機械が開示されている。作業機械のコントローラは、地形センサによって計測した地形データに基づいて作業機械の掘削開始位置を決定する。
【先行技術文献】
【特許文献】
【0004】
特許第7274831号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の従来技術によれば、計測した現在の地形と目標地形に基づいて、作業機械の掘削開始位置を決定し、作業機械を掘削開始位置に移動することができる。
【0006】
しかしながら、特許文献1の従来技術では、掘削開始位置を決定し、掘削作業を開始するまでに時間を要する恐れがあった。
【0007】
例えば、特許文献1の従来技術では、作業機械を所定距離だけ前後に移動させて作業機械の位置を調整した後、地形データを計測し、目標とする掘削量を確保可能か否かを判定する。この処理を掘削量が確保可能と判定されるまで繰り返すため、所定距離を小さくしすぎると、掘削開始位置を決定し、掘削作業を開始するまでに時間を要する恐れがあった。
【0008】
本発明は、上記を鑑みてなされたものであり、その目的は、掘削・積込作業を行う際に効率的に移動位置を決定し、迅速に掘削・積込作業を開始することができる作業機械を提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の作業機械は、作業装置を有し、前記作業装置により対象物の掘削作業と運搬車両への積込作業を行う作業機械であって、前記作業機械を走行させる走行アクチュエータと、前記作業機械の周囲の地形形状を計測する地形計測装置と、前記運搬車両への目標積載量を取得する目標積載量取得装置と、前記作業装置の幾何情報を含む機体幾何情報と、前記地形計測装置により計測された前記地形形状と、前記目標積載量取得装置により取得された前記目標積載量に基づいて、前記掘削及び積込作業を行う時の前記作業機械の移動位置を決定し、前記作業機械を前記移動位置へ移動させるように前記走行アクチュエータを制御するコントローラと、を備え、前記コントローラは、前記地形形状と前記機体幾何情報に基づいて、複数の位置候補において前記掘削作業を行う時の前記対象物の掘削量を演算する掘削量演算部と、前記掘削量演算部で演算した前記複数の位置候補と前記掘削量の関係に基づいて、前記目標積載量以上の前記掘削量を確保可能な複数の掘削位置候補を演算する掘削位置候補演算部と、前記掘削位置候補演算部で演算した前記複数の掘削位置候補から前記作業機械の移動位置を決定する移動位置決定部と、前記移動位置決定部で決定した前記移動位置へ前記作業機械を移動させるように前記走行アクチュエータの制御指令を演算するアクチュエータ制御部と、を備えることを特徴とする。
【発明の効果】
【0010】
本発明によれば、掘削・積込作業を行う際に効率的に移動位置を決定し、迅速に掘削・積込作業を開始することができる作業機械を実現できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
鋼管
20日前
FKS株式会社
擁壁
9日前
鈴健興業株式会社
敷板部材
5日前
株式会社クボタ
作業車
7日前
株式会社クボタ
作業車
7日前
株式会社奥村組
ケーソン工法
12日前
株式会社ネクステリア
平板基礎
5日前
個人
擁壁用ブロックおよび擁壁
6日前
株式会社奥村組
ケーソン刃口金物
12日前
株式会社大林組
建物の構造
6日前
株式会社武井工業所
積みブロック
29日前
株式会社熊谷組
密度計測方法
7日前
株式会社大林組
袋体付き排水パイプ
19日前
株式会社熊谷組
地盤改良方法
1日前
株式会社大林組
袋体付き排水パイプ
19日前
大和ハウス工業株式会社
杭抜き先端具
13日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
27日前
ヤマト発動機株式会社
浮遊型消波装置
9日前
日立建機株式会社
建設機械
5日前
ゼニヤ海洋サービス株式会社
通船ゲート
19日前
株式会社フジタ
掘削機
28日前
鹿島建設株式会社
接続方法および接続構造
19日前
JFEスチール株式会社
鋼管矢板の継手構造
21日前
有限会社 櫂設計事務所
掘削・撹拌具
1か月前
日立建機株式会社
電動式作業機械
5日前
JFEスチール株式会社
鋼管矢板の継手構造
9日前
株式会社フジタ
建築物とその施工方法
19日前
JFEスチール株式会社
鋼管矢板の継手構造
21日前
株式会社大林組
建物の構築方法及び建物
19日前
株式会社武井工業所
積みブロック用基礎ブロック
29日前
浙江工業大学
多機能土柱モデル装置及び使用方法
5日前
株式会社小松製作所
作業機械
29日前
株式会社熊谷組
杭頭処理構造、杭頭処理方法
9日前
ヤンマーホールディングス株式会社
作業機械
1日前
鹿島建設株式会社
柱建て込み方法
13日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ