TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153199
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055542
出願日
2024-03-29
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/20 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】3軸の回転自由度を有する作業具を目標掘削面に正対させながら速やかに目標掘削面に沿った掘削を行うことが可能な作業機械を提供する。
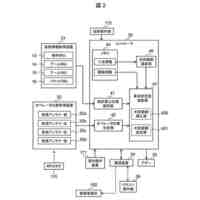
【解決手段】制御装置28は、作業具46上に設定された複数の作業点44a,44bの座標を算出する作業点座標演算部32と、複数の作業点44a,44bにそれぞれ対応する複数の目標点45a,45bの座標を算出する目標点座標演算部33と、複数の作業点44a,44bの座標と複数の目標点45a,45bの座標との各偏差を求める作業点偏差演算部34と、前記各偏差の合計が小さくなるように複数の作業点44a,44bの各速度ベクトル41a,41bを算出する作業点速度ベクトル演算部35と、各速度ベクトル41a,41bに基づき、複数のアクチュエータ5,6,7,23,48,50の各目標速度を算出するアクチュエータ目標速度演算部36とを備える。
【選択図】 図3
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体上に旋回可能に取り付けられた上部旋回体と、
前記上部旋回体に上下方向に回動可能に取り付けられ、先端に3軸の回転自由度を有する作業具を備えた多関節作業機と、
前記多関節作業機を駆動する複数のアクチュエータと、
複数の前記アクチュエータの各速度を検出するアクチュエータ速度センサと、
前記上部旋回体および前記多関節作業機の姿勢を検出する姿勢センサと、
複数の前記アクチュエータを制御する制御装置とを備えた作業機械において、
前記制御装置は、
前記姿勢センサの検出値に基づき、前記作業具上に設定された複数の作業点の座標を算出する作業点座標演算部と、
複数の前記作業点にそれぞれ対応する複数の目標点の座標を算出する目標点座標演算部と、
前記作業点座標演算部が算出した複数の前記作業点の座標と前記目標点座標演算部が算出した複数の前記目標点の座標との各偏差を求める作業点偏差演算部と、
前記作業点偏差演算部が算出した各偏差の合計が小さくなるように複数の前記作業点の各速度ベクトルを算出する作業点速度ベクトル演算部と、
前記作業点速度ベクトル演算部が算出した複数の前記作業点の各速度ベクトルに基づき、複数の前記アクチュエータの各目標速度を算出するアクチュエータ目標速度演算部と、
前記アクチュエータ目標速度演算部が算出した各目標速度と前記アクチュエータ速度センサで検出した各速度とが一致するように複数の前記アクチュエータを制御するアクチュエータ制御部とを備える
ことを特徴とする作業機械。
続きを表示(約 910 文字)
【請求項2】
請求項1に記載の作業機械において、
複数の前記作業点は、第1作業点と第2作業点とを含み、
複数の前記目標点は、前記第1作業点に対応する第1目標点と、前記第2作業点に対応する第2目標点とを含み、
前記目標点座標演算部は、前記第1目標点と前記第2目標点との距離が前記第1作業点と前記第2作業点との距離と等しく、かつ、前記第1作業点と前記第1目標点との偏差と、前記第2作業点と前記第2目標点との偏差との合計が最小となるように前記第1目標点および前記第2目標点を設定する
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記作業具の爪先方向を指定する入力装置を備え、
複数の前記作業点は、第1作業点と第2作業点とを含み、
複数の前記目標点は、前記第1作業点に対応する第1目標点と、前記第2作業点に対応する第2目標点とを含み、
前記目標点座標演算部は、
前記作業具の爪先方向が、前記入力装置より指定された爪先方向と一致するように前記作業具を仮想的に回転させ、
仮想的に回転させた前記作業具上の前記第1作業点および前記第2作業点を第1仮想作業点および第2仮想作業点とし、
前記第1目標点と前記第2目標点との距離が前記第1仮想作業点と前記第2仮想作業点との距離と等しく、かつ、前記第1仮想作業点と前記第1目標点との偏差と、前記第2仮想作業点と前記第2目標点との偏差との合計が最小となるように前記第1目標点および前記第2目標点を設定する
ことを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
前記目標点座標演算部は、
前記作業具の動作経路および施工対象の設計情報を取得し、
前記制御装置の制御周期に応じて、前記動作経路上に仮想中継点を設け、
前記設計情報を基に、前記動作経路の始点、前記仮想中継点および前記動作経路の終点のそれぞれにおいて前記目標点を設定する
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、油圧ショベル等の作業機械に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来から、法面掘削等の施工効率を向上するために、あらゆる形状の法面に対してバケット角度を平行に保つことを可能とするチルトローテータバケットを制御する技術が存在する。
【0003】
例えば、特許文献1には、車体に動作可能に支持された支持部と、前記支持部の先端に取り付けられたチルトローテータと、刃先を有し、前記チルトローテータを介して前記支持部に対して互いに異なる平面で交差する3つの軸回りに回転可能に支持されたアタッチメントとを備える作業機械を制御するためのシステムであって、プロセッサを備え、前記プロセッサは、複数のセンサから計測値を取得し、前記計測値に基づいて、前記車体に対する前記アタッチメントの姿勢を算出し、算出した前記アタッチメントの前記姿勢に基づいて、仮想回転軸を決定し、算出した前記アタッチメントの前記姿勢に基づいて、設計面(目標掘削面)と前記アタッチメントの刃先とが平行に近づくように、前記仮想回転軸回りに前記アタッチメントを回転させるための前記チルトローテータの制御信号を生成し、生成した前記制御信号を出力するシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2023―51363号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のシステムにより、アタッチメント(作業具)を目標掘削面に正対させる操作が容易になる。しかしながら、当該システムを適用した作業機械で掘削を行う場合、アタッチメントを目標掘削面に正対させる動作を行った後に、アタッチメントを目標掘削面に沿った掘削を行う動作を追加で行う必要があるため、作業効率の点で改善の余地がある。
【0006】
本発明は、上記課題に鑑みてなされたものであり、その目的は、3軸の回転自由度を有する作業具を目標掘削面に正対させながら速やかに目標掘削面に沿った掘削を行うことが可能な作業機械を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、下部走行体と、前記下部走行体上に旋回可能に取り付けられた上部旋回体と、前記上部旋回体に上下方向に回動可能に取り付けられ、先端に3軸の回転自由度を有する作業具を備えた多関節作業機と、前記多関節作業機を駆動する複数のアクチュエータと、複数の前記アクチュエータの各速度を検出するアクチュエータ速度センサと、前記上部旋回体および前記多関節作業機の姿勢を検出する姿勢センサと、複数の前記アクチュエータを制御する制御装置とを備えた作業機械において、前記制御装置は、前記姿勢センサの検出値に基づき、前記作業具上に設定された複数の作業点の座標を算出する作業点座標演算部と、複数の前記作業点にそれぞれ対応する複数の目標点の座標を算出する目標点座標演算部と、前記作業点座標演算部が算出した複数の前記作業点の座標と前記目標点座標演算部が算出した複数の前記目標点の座標との各偏差を求める作業点偏差演算部と、前記作業点偏差演算部が算出した各偏差の合計が小さくなるように複数前記の作業点の各速度ベクトルを算出する作業点速度ベクトル演算部と、前記作業点速度ベクトル演算部が算出した複数の前記作業点の各速度ベクトルに基づき、複数の前記アクチュエータの各目標速度を算出するアクチュエータ目標速度演算部と、前記アクチュエータ目標速度演算部が算出した各目標速度と前記アクチュエータ速度センサで検出した各速度とが一致するように複数の前記アクチュエータを制御するアクチュエータ制御部とを備えるものとする。
【発明の効果】
【0008】
本発明によれば、3軸の回転自由度を有する作業具を目標掘削面に正対させる動作と作業具を目標掘削面に到達させる動作とが同時並行で行われるため、作業具を目標掘削面に正対させながら速やかに目標掘削面に沿った掘削を行うことが可能となる。
【図面の簡単な説明】
【0009】
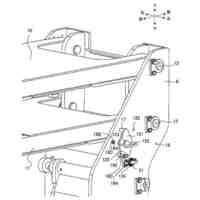
第1の実施例に係る作業機械の一例である油圧ショベルの外観を模式的に示す斜視図である。
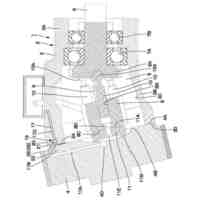
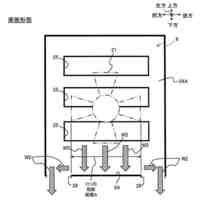
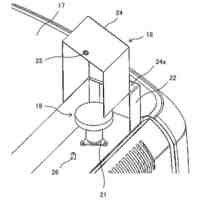
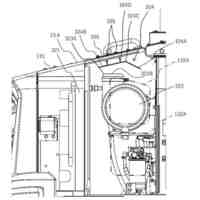
第1の実施例に係るチルトローテータバケットの模式図である。
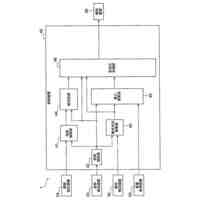
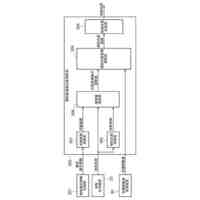
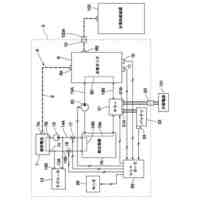
第1の実施例に係る油圧ショベルの制御装置の処理機能の一部を模式的に示す機能ブロック図である。
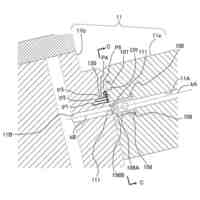
第1の実施例に係るチルトローテータバケットとx―z平面における目標掘削面との正対方法を示す図である。
第1の実施例に係るチルトローテータバケットとx―y平面における目標掘削面との正対方法を示す図である。
第1の実施例に係るチルトローテータバケットとy―z平面における目標掘削面との正対方法を示す図である。
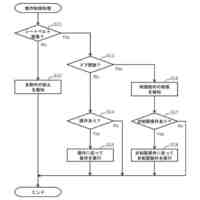
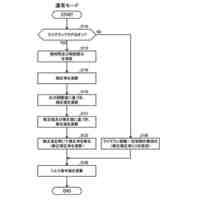
第1の実施例に係る制御装置の処理内容を示すフローチャートである。
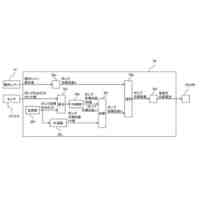
第2の実施例に係る油圧ショベルの制御装置の処理機能の一部を模式的に示す機能ブロック図である。
第2の実施例に係る目標点の設定方法を示す概略図である。
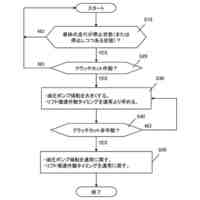
第2の実施例に係る制御装置の処理内容を示すフローチャートである。
第3の実施例に係る油圧ショベルの制御装置の処理機能の一部を模式的に示す機能ブロック図である。
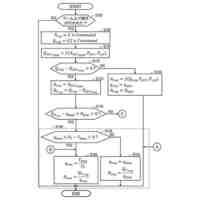
第3の実施例に係る制御装置の処理内容を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照しつつ本発明の実施の形態を説明する。なお、本実施の形態では、作業機械として、フロント作業機(作業装置)を備える油圧ショベルを例示して説明するが、産業用、医療用のロボットアーム等の複数の回転動作を含む機構を備える他の機械にも本発明を適用することが可能である。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
油圧機器
9日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業車両
10日前
日立建機株式会社
作業車両
10日前
日立建機株式会社
建設機械
10日前
日立建機株式会社
建設機械
10日前
日立建機株式会社
油圧機器
14日前
日立建機株式会社
作業車両
8日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
作業車両
14日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
転圧機械
8日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
変速装置
7日前
日立建機株式会社
作業車両
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業車両
3日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
建設機械
8日前
日立建機株式会社
建設機械
8日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ