TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152933
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055121
出願日
2024-03-28
発明の名称
ロボットおよびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】重量バランスのよい第2アームを有するロボットおよびロボットシステムを提供する。
【解決手段】第2回動軸に沿う方向からの平面視で、第2回動軸と第3回動軸とに交わる直線を第2アームの仮想中心軸としたとき、仮想中心軸の一方側に第1モーターおよび中間プーリーが位置し、他方側に第2モーターが位置し、アームベースには、アームベースを第2回動軸に沿う方向に貫通する貫通孔が形成され、貫通孔は、第2回動軸に沿う方向からの平面視で、仮想中心軸の一方側に偏って配置されている。
【選択図】図9
特許請求の範囲
【請求項1】
基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
前記第1アームに連結されているアームベースを備え、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームに配置され、前記第1回動軸と平行な第3回動軸に沿うスプラインシャフトと、前記スプラインシャフトに装着されているスプラインナットおよびボールネジナットと、を備え、前記スプラインナットを回動させると前記スプラインシャフトが前記第3回動軸まわりに回動し、前記ボールネジナットを回動させると前記スプラインシャフトが前記第3回動軸に沿って直動する作業ヘッドと、
前記第2アーム内に配置され、前記スプラインナットを回動させて前記スプラインシャフトを前記第3回動軸まわりに回動させるスプラインシャフト第1駆動機構および前記ボールネジナットを回動させて前記スプラインシャフトを前記第3回動軸に沿って直動させるスプラインシャフト第2駆動機構と、を有し、
前記スプラインシャフト第1駆動機構は、前記アームベースに固定されている第1モーターと、前記第1モーターの回動軸に固定されている第1プーリーと、前記スプラインナットに固定されている第2プーリーと、前記アームベースに対して前記第1回動軸と平行な第4回動軸まわりに回動する中間プーリーと、前記第1プーリーと前記中間プーリーとに回し掛けられている第1ベルトと、前記中間プーリーと前記第2プーリーとに回し掛けられている第2ベルトと、を有し、
前記スプラインシャフト第2駆動機構は、前記アームベースに固定されている第2モーターと、前記第2モーターの回動軸に固定されている第3プーリーと、前記ボールネジナットに固定されている第4プーリーと、前記第3プーリーと前記第4プーリーとに回し掛けられている第3ベルトと、を有し、
前記第2回動軸に沿う方向からの平面視で、前記第2回動軸と前記第3回動軸とに交わる直線を前記第2アームの仮想中心軸としたとき、前記仮想中心軸の一方側に前記第1モーターおよび前記中間プーリーが位置し、他方側に前記第2モーターが位置し、
前記アームベースには、前記アームベースを前記第2回動軸に沿う方向に貫通する貫通孔が形成され、前記貫通孔は、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸の前記一方側に偏って配置されていることを特徴とするロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記第3回動軸は、前記第4回動軸よりも前記第2アームの先端側に位置し、
前記貫通孔は、前記第2回動軸に沿う方向からの平面視で、前記第4回動軸よりも前記第3回動軸側に位置している請求項1に記載のロボット。
【請求項3】
前記第2回動軸に沿う方向からの平面視で、前記貫通孔と前記中間プーリーとが重なっている請求項1に記載のロボット。
【請求項4】
前記第2回動軸に沿う方向からの平面視で、前記中間プーリーと前記第3ベルトとが重なっている請求項1に記載のロボット。
【請求項5】
前記第2回動軸に沿う方向からの平面視で、前記中間プーリーと前記仮想中心軸とが重なっている請求項1に記載のロボット。
【請求項6】
前記中間プーリーは、前記第4回動軸に沿って延在している軸部と、前記軸部に配置され、前記第1ベルトが回し掛けられている第1中間プーリーと、前記軸部に配置され、前記第1中間プーリーよりも前記アームベース側に位置し、前記第2ベルトが回し掛けられている第2中間プーリーと、を有し、
前記アームベースに固定され、第1軸受を介して前記軸部の前記第1中間プーリーと前記第2中間プーリーとの間の部分を保持し、第2軸受を介して前記軸部の前記第2中間プーリーよりも前記アームベース側の部分を保持している支持部材を有する請求項1に記載のロボット。
【請求項7】
前記第4回動軸に直交する方向からの平面視で、前記第1ベルトと前記第2ベルトとの間に前記第3ベルトが位置している請求項6に記載のロボット。
【請求項8】
前記第1中間プーリーは、前記第2中間プーリーよりも大径であり、
前記第1中間プーリーには、前記第1中間プーリーを前記第4回動軸に沿う方向に貫通する肉抜部が形成されている請求項6に記載のロボット。
【請求項9】
前記第2アームに配置され、前記第2アームの慣性を計測する慣性センサーモジュールが載置されている載置部材を有し、
前記載置部材は、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸と重なっている請求項1に記載のロボット。
【請求項10】
前記第2アームに配置され、前記第2アームの慣性を計測する慣性センサーモジュールを有し、
前記慣性センサーモジュールは、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸の前記他方側に偏って位置している請求項1に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットおよびロボットシステムに関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
特許文献1に記載されたロボットは、スカラロボットであり、基台と、基台に対して鉛直方向に沿う第1回動軸まわりに回動可能に連結された第1アームと、第1アームに対して鉛直方向に沿う第2回動軸まわりに回動可能に連結された第2アームと、第2アームに配置された作業ヘッドと、を有する。また、作業ヘッドは、鉛直方向に並んで同軸的に配置されたスプラインナットおよびボールネジナットと、スプラインナットおよびボールネジナットに挿通されたスプラインシャフトと、を有する。このような作業ヘッドでは、スプラインナットを回動させると、スプラインシャフトがその中心軸であり鉛直方向に沿う第3回動軸まわりに回動するとともに第3回動軸に沿って直動し、ボールネジナットを回動させると、スプラインシャフトが第3回動軸に沿って直動する。
【0003】
また、ロボットは、スプラインナットを回動させてスプラインシャフトを第3回動軸まわりに回動させるスプラインシャフト第1駆動機構を有する。スプラインシャフト第1駆動機構は、第1モーターと、第1モーターの回動軸に固定された駆動プーリーと、スプラインナットに固定された従動プーリーと、駆動プーリーと従動プーリーとの間に位置し、鉛直方向に沿う第4回動軸まわりに回動する中間プーリーと、駆動プーリーと中間プーリーとに回し掛けられた第1ベルトと、中間プーリーと従動プーリーとに回し掛けられた第2ベルトと、を有する。
【0004】
また、ロボットは、ボールネジナットを回動させてスプラインシャフトを第3回動軸に沿って直動させるスプラインシャフト第2駆動機構を有する。スプラインシャフト第2駆動機構は、第2モーターと、第2モーターの回動軸に固定された駆動プーリーと、ボールネジナットに固定された従動プーリーと、駆動プーリーと従動プーリーとに回し掛けられたベルトと、を有する。
【先行技術文献】
【特許文献】
【0005】
特開2023-079111号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、第2回動軸に沿う方向からの平面視で、第2回動軸と第3回動軸とに交わる直線を第2アームの仮想中心軸としたとき、特許文献1のロボットでは、スプラインシャフト第1駆動機構だけに含まれる中間プーリーが、仮想中心軸の一方側に偏って配置されているため、中間プーリーの重量に起因して仮想中心軸に対して一方側の重量と他方側の重量との差が大きくなり、第2アームの駆動精度が低下するおそれがある。
【課題を解決するための手段】
【0007】
本発明のロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
前記第1アームに連結されているアームベースを備え、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームに配置され、前記第1回動軸と平行な第3回動軸に沿うスプラインシャフトと、前記スプラインシャフトに装着されているスプラインナットおよびボールネジナットと、を備え、前記スプラインナットを回動させると前記スプラインシャフトが前記第3回動軸まわりに回動し、前記ボールネジナットを回動させると前記スプラインシャフトが前記第3回動軸に沿って直動する作業ヘッドと、
前記第2アーム内に配置され、前記スプラインナットを回動させて前記スプラインシャフトを前記第3回動軸まわりに回動させるスプラインシャフト第1駆動機構および前記ボールネジナットを回動させて前記スプラインシャフトを前記第3回動軸に沿って直動させるスプラインシャフト第2駆動機構と、を有し、
前記スプラインシャフト第1駆動機構は、前記アームベースに固定されている第1モーターと、前記第1モーターの回動軸に固定されている第1プーリーと、前記スプラインナットに固定されている第2プーリーと、前記アームベースに対して前記第1回動軸と平行な第4回動軸まわりに回動する中間プーリーと、前記第1プーリーと前記中間プーリーとに回し掛けられている第1ベルトと、前記中間プーリーと前記第2プーリーとに回し掛けられている第2ベルトと、を有し、
前記スプラインシャフト第2駆動機構は、前記アームベースに固定されている第2モーターと、前記第2モーターの回動軸に固定されている第3プーリーと、前記ボールネジナットに固定されている第4プーリーと、前記第3プーリーと前記第4プーリーとに回し掛けられている第3ベルトと、を有し、
前記第2回動軸に沿う方向からの平面視で、前記第2回動軸と前記第3回動軸とに交わる直線を前記第2アームの仮想中心軸としたとき、前記仮想中心軸の一方側に前記第1モーターおよび前記中間プーリーが位置し、他方側に前記第2モーターが位置し、
前記アームベースには、前記アームベースを前記第2回動軸に沿う方向に貫通する貫通孔が形成され、前記貫通孔は、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸の前記一方側に偏って配置されている。
【0008】
本発明のロボットシステムは、ロボットと、
前記ロボットの駆動を制御する制御装置と、を有し、
前記ロボットは、基台と、
前記基台に連結され、前記基台に対して第1回動軸まわりに回動する第1アームと、
前記第1アームに連結されているアームベースを備え、前記第1アームに対して前記第1回動軸と平行な第2回動軸まわりに回動する第2アームと、
前記第2アームに配置され、前記第1回動軸と平行な第3回動軸に沿うスプラインシャフトと、前記スプラインシャフトに装着されているスプラインナットおよびボールネジナットと、を備え、前記スプラインナットを回動させると前記スプラインシャフトが前記第3回動軸まわりに回動し、前記ボールネジナットを回動させると前記スプラインシャフトが前記第3回動軸に沿って直動する作業ヘッドと、
前記第2アーム内に配置され、前記スプラインナットを回動させて前記スプラインシャフトを前記第3回動軸まわりに回動させるスプラインシャフト第1駆動機構および前記ボールネジナットを回動させて前記スプラインシャフトを前記第3回動軸に沿って直動させるスプラインシャフト第2駆動機構と、を有し、
前記スプラインシャフト第1駆動機構は、前記アームベースに固定されている第1モーターと、前記第1モーターの回動軸に固定されている第1プーリーと、前記スプラインナットに固定されている第2プーリーと、前記アームベースに対して前記第1回動軸と平行な第4回動軸まわりに回動する中間プーリーと、前記第1プーリーと前記中間プーリーとに回し掛けられている第1ベルトと、前記中間プーリーと前記第2プーリーとに回し掛けられている第2ベルトと、を有し、
前記スプラインシャフト第2駆動機構は、前記アームベースに固定されている第2モーターと、前記第2モーターの回動軸に固定されている第3プーリーと、前記ボールネジナットに固定されている第4プーリーと、前記第3プーリーと前記第4プーリーとに回し掛けられている第3ベルトと、を有し、
前記第2回動軸に沿う方向からの平面視で、前記第2回動軸と前記第3回動軸とに交わる直線を前記第2アームの仮想中心軸としたとき、前記仮想中心軸の一方側に前記第1モーターおよび前記中間プーリーが位置し、他方側に前記第2モーターが位置し、
前記アームベースには、前記アームベースを前記第2回動軸に沿う方向に貫通する貫通孔が形成され、前記貫通孔は、前記第2回動軸に沿う方向からの平面視で、前記仮想中心軸の前記一方側に偏って配置されている。
【図面の簡単な説明】
【0009】
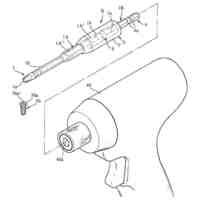
第1実施形態に係るロボットを示す側面図である。
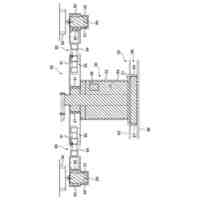
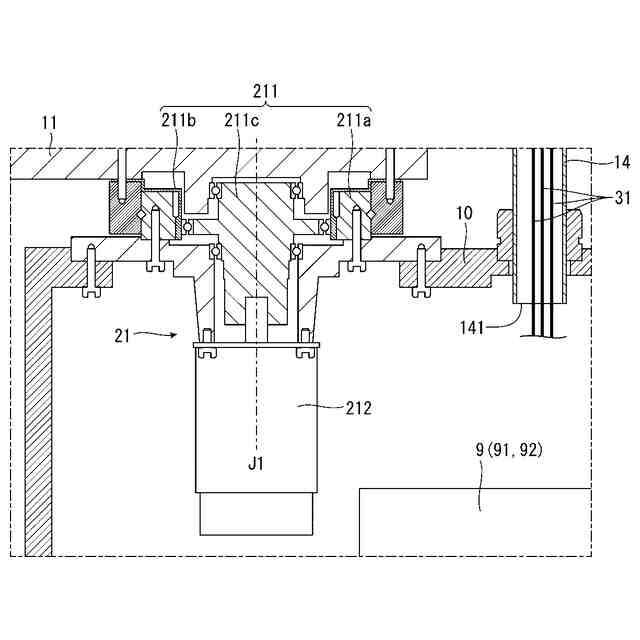
基台と第1アームとの連結部分を示す断面図である。
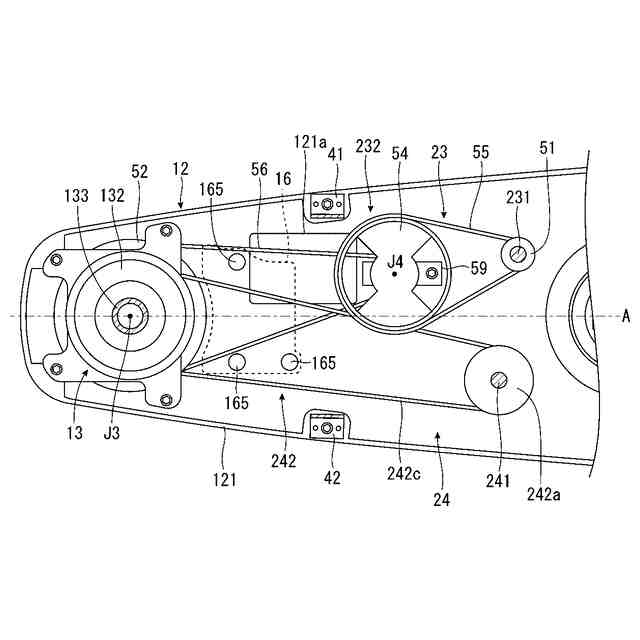
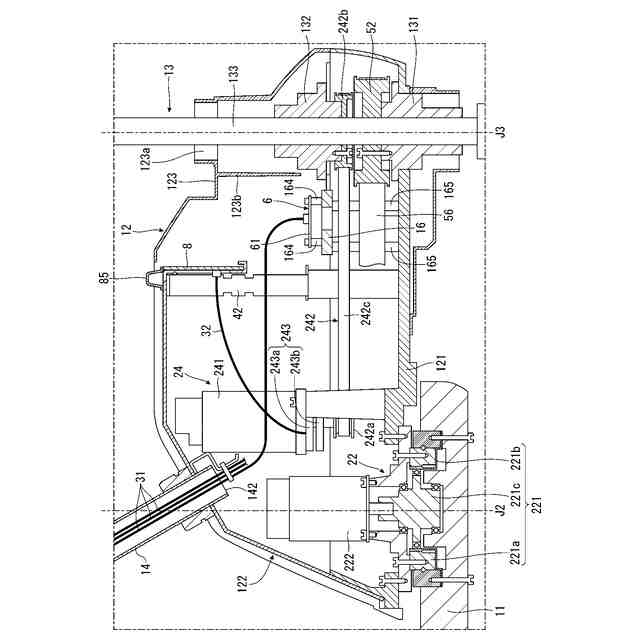
第2アームを横方向一方側から見た断面図である。
第2アームを横方向他方側から見た断面図である。
フレームの先端部を拡大して示す斜視図である。
第2アームの内部を示す上面図である。
中間プーリーを拡大して示す断面図である。
フレームの先端部を拡大して示す断面図である。
アームベースに形成された貫通孔の配置を説明するための上面図である。
第2実施形態に係るロボットが有する第2アームの内部を示す上面図である。
【発明を実施するための形態】
【0010】
以下、本発明のロボットおよびロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
川崎重工業株式会社
ロボット
10日前
株式会社三協システム
製函機
1か月前
株式会社竹中工務店
補助セット
9日前
株式会社不二越
ロボット
9日前
株式会社三協システム
移載装置
1か月前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
ハンド
1日前
太陽パーツ株式会社
アシストスーツ
1か月前
日本精工株式会社
締結用工具
1か月前
SMC株式会社
着脱装置
1か月前
株式会社ミクロブ
把持装置
1か月前
株式会社不二越
移動ロボットシステム
12日前
ARMA株式会社
ジョイントフレーム
1か月前
工機ホールディングス株式会社
作業機
1日前
トヨタ自動車株式会社
ロボット
4日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
22日前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
1日前
本田技研工業株式会社
装置
15日前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
4日前
株式会社不二越
垂直多関節ロボット
23日前
工機ホールディングス株式会社
作業機
1日前
ダイハツ工業株式会社
移載治具
1か月前
アネックスツール株式会社
ドライバービット
8日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
シンフォニアテクノロジー株式会社
搬送装置
12日前
ライオン株式会社
移載システム
24日前
ワールド技研株式会社
ロボットセル装置
9日前
川崎重工業株式会社
ワーク搬送ロボット
1日前
株式会社マキタ
回転打撃工具
4日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ