TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025163334
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024066472
出願日
2024-04-17
発明の名称
ツール位置検出装置及びツール位置検出システム
出願人
株式会社チップマン
代理人
弁理士法人維新国際特許事務所
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20251022BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】装置周りを広く有効に使用することができ、且つ、効率良くツールのズレ量を検出することができ、しかも、低コストなツール位置検出装置を提供する。
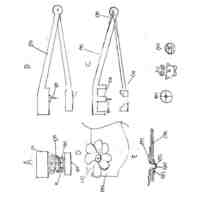
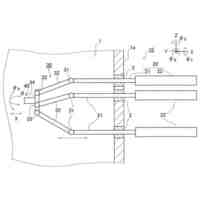
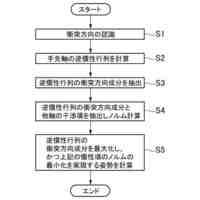
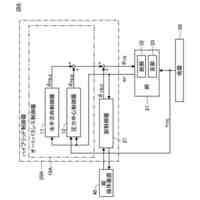
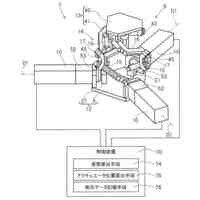
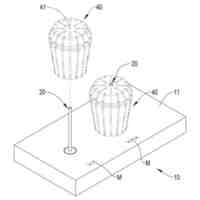
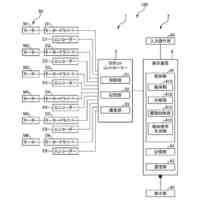
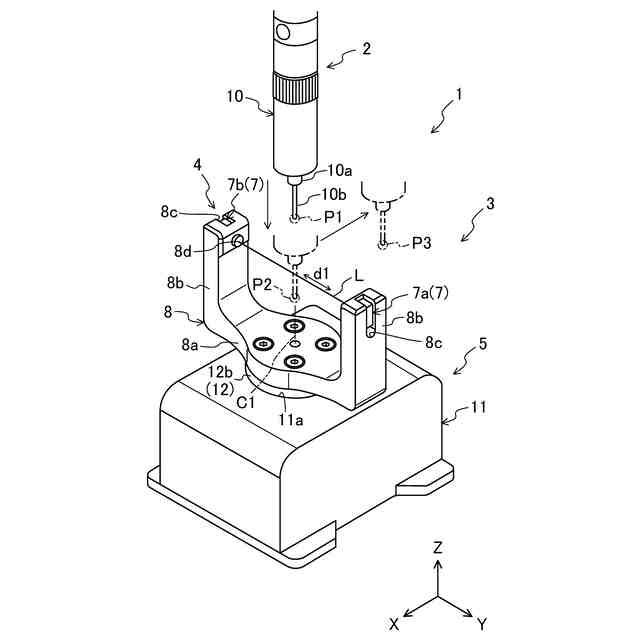
【解決手段】ツール位置検出装置3は、溶接トーチ10のワイヤ10bによる光路Lの遮断タイミングを検出可能な光電センサ7と、光電センサ7を支持する支持フレーム8と、支持フレーム8を光路Lに直交する回転軸心C1を中心として90°正逆回転させるロータリアクチュエータ12と、ロータリアクチュエータ12の正逆回転動作を制御する制御部6と、を備える。制御部6は、ワイヤ10bの移動速度Vと、ワイヤ10bによる光路Lの遮断タイミングの基準値t1と実測値t2との差分Δtと、に基づいてワイヤ10bの位置ズレ量ΔS=V×Δtを演算するズレ量演算部6aを備える。
【選択図】図1
特許請求の範囲
【請求項1】
産業用ロボットのアーム先端に取り付けられたツールの位置を検出するツール位置検出装置であって、
光を投射して光路を形成するように構成され、前記ツールによる前記光路の遮断タイミングを検出可能な光電センサと、
前記光電センサを支持する支持フレームと、
前記支持フレームを前記光路に直交する回転軸心を中心として所定の角度において正逆回転させることにより前記光路の方向を切り替え可能な光路切替機構と、
前記光電センサ及び前記光路切替機構に接続され、当該光路切替機構の正逆回転動作を制御する制御部と、を備え、
前記制御部は、前記ツールの移動速度と、前記ツールによる前記光路の遮断タイミングの基準値と実測値との差分と、に基づいて前記ツールの位置ズレ量を演算するズレ量演算部を備えていることを特徴とするツール位置検出装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載のツール位置検出装置において、
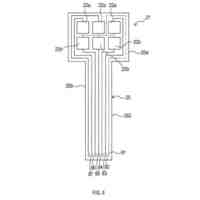
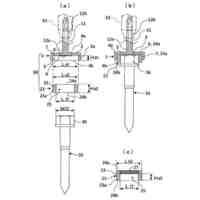
前記支持フレームは、水平方向に延び、且つ、前記回転軸心が中央において上下に延びる第1フレームと、当該第1フレームの各端部からそれぞれ上方に延びる一対の第2フレームと、を備え、
前記光電センサは、一方の前記第2フレームに設けられ、前記光を投射する投光部と、他方の前記第2フレームに設けられ、前記投光部からの前記光を受光する受光部と、を備え、前記投光部と前記受光部とが水平方向に対向していることを特徴とするツール位置検出装置。
【請求項3】
請求項2に記載のツール位置検出装置において、
前記第1フレーム及び前記第2フレームの内部には、連続して繋がる中空部が形成され、且つ、前記第1フレームの中央下部には、前記中空部に連通する連通孔が形成され、
前記中空部には、一端が前記投光部と前記受光部とにそれぞれ繋がる一方、他端側が前記連通孔を介して前記第1フレームの外側へと出されて前記制御部に接続される一対の信号線が配索されていることを特徴とするツール位置検出装置。
【請求項4】
請求項1から3のいずれか1つに記載のツール位置検出装置において、
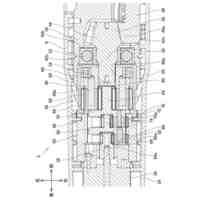
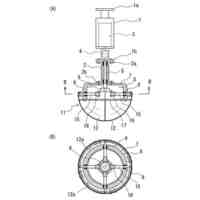
前記光路切替機構は、電磁弁を介して給排される圧縮エアで駆動するロータリアクチュエータであることを特徴とするツール位置検出装置。
【請求項5】
請求項1から3のいずれか1つに記載のツール位置検出装置と、前記制御部に接続された前記産業用ロボットと、を備えたツール位置検出システムであって、
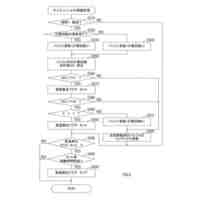
前記制御部は、前記光路が第1方向となるように前記光路切替機構を正転制御し、且つ、前記ツールが予め決められた第1基準位置から水平方向に定速で移動するように前記産業用ロボットを制御して前記ツールにより前記光路を遮断させた後、前記光路が前記第1方向と異なる第2方向となるように前記光路切替機構を逆転制御し、且つ、前記ツールが予め決められた第2基準位置から水平方向に定速で移動するように前記産業用ロボットを制御して前記ツールにより前記光路を遮断させ、
前記ズレ量演算部は、前記光路が前記第1方向の際の前記ツールの第1位置ズレ量と、前記光路が前記第2方向の際の前記ツールの第2位置ズレ量と、をそれぞれ演算するように構成されていることを特徴とするツール位置検出システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボットのアーム先端に取り付けられたツールの位置を検出するツール位置検出装置及びツール位置検出システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、工場における多くの生産ラインでは、多数の産業用ロボットを利用して効率的に生産が行われる。これら産業用ロボットのアーム先端には、作業を行う上で必要な様々なツールが取り付けられ、これらツールを用いて繰り返し作業をさせることで生産性が高められている。
ところで、上述の如き産業用ロボットに取り付けられたツールは、使用時において不意に周囲の物に接触したり、或いは、メンテナンスの実施等を理由として、予め決められた基準の状態から変化した状態になってしまい、そのことが原因となってその後の生産がうまく行われなくなってしまうことがある。
【0003】
これに対応するために、ツールの位置が基準の状態からズレているのか否かを検出する装置が一般的に知られている。例えば、特許文献1に開示されているツール位置検出装置は、産業用ロボットのアーム先端に取り付けられたツールの位置を検出可能になっていて、光を投射する投光部及び当該投光部からの投射光を受光する受光部を有する二組の光電センサと、これら二組の光電センサを支持する支持フレームと、を備えている。支持フレームは、平面視で略U字状をなしており、水平方向に延びる第1フレームと、該第1フレームの各端部から同方向の水平方向に平行に延びる一対の第2フレームと、で構成されている。一方の光電センサの投光部は、一方の第2フレームの先端側に設けられる一方、一方の光電センサの受光部は、他方の第2フレームの基端側に設けられ、他方の光電センサの投光部は、一方の第2フレームの基端側に設けられる一方、他方の光電センサの受光部は、他方の第2フレームの先端側に設けられていて、一方の光電センサの投射光による第1光路と他方の光電センサの投射光による第2光路とが所定の位置で交わっている。各光電センサは、ツールによる第1光路又は第2光路の遮断タイミングを検出可能になっている。そして、ツールが第1光路と第2光路とをそれぞれ横切って遮断するように産業用ロボットを制御した後、ツールによる第1光路又は第2光路の遮断タイミングの基準値と実測値との差分を算出することにより、ツールの2方向における基準位置からの位置ズレ量を検出するようにしている。
【先行技術文献】
【特許文献】
【0004】
欧州特許第1722935号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1のツール位置検出装置は、第1光路と第2光路とが平面視で交差するように二組の光電センサを配置するために当該各光電センサを支持する支持フレームが水平方向に幅広な構造になってしまう。したがって、装置周りにおけるツールの移動可能領域が制限されて産業用ロボットの動作に制約が発生したり、或いは、ツールの動作のティーチング作業が煩雑になってしまうという問題がある。また、ツールの2方向の位置ズレ量を検出するために、2組の光電センサが必要であり、費用が嵩むという問題もある。
【0006】
これを回避するために、光電センサを一つにするとともに、光電センサの光路に対するツールの向きを産業用ロボットにより2通りに変更させて光路をそれぞれ横切って遮断させることでツールの2方向における位置ズレ量を検出する方法も考えられる。
【0007】
しかし、生産ラインにおいて多く使用される多関節型の産業用ロボットの場合、ツールの向きを2通りに変更させようとすると、アームの全ての関節の軸をそれぞれ複雑に回転させる必要があるため、ツールの向きを変更させるのに時間が掛かってしまい、ズレ量検出に掛かる時間が増えてしまう。
【0008】
本発明は、斯かる点に鑑みてなされたものであり、その目的とするところは、装置周りを広く有効に使用することができ、且つ、効率良くツールのズレ量を検出することができ、しかも、低コストなツール位置検出装置及びそれを備えたツール位置検出システムを提供することにある。
【課題を解決するための手段】
【0009】
上記の目的を達成するために、本発明では、一つの光電センサの光路を2方向に変化させることが可能な機構を設けるようにしたことを特徴とする。
【0010】
具体的には、産業用ロボットのアーム先端に取り付けられたツールの位置を検出するツール位置検出装置を対象とし、次のような対策を講じた。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
17日前
川崎重工業株式会社
ハンド
21日前
株式会社マキタ
ハンマドリル
4日前
株式会社マキタ
ハンマドリル
4日前
トヨタ自動車株式会社
ロボット
24日前
工機ホールディングス株式会社
作業機
21日前
川崎重工業株式会社
塗装システム
21日前
株式会社安川電機
ロボット
1日前
トヨタ自動車株式会社
軌道生成装置
24日前
トヨタ自動車株式会社
ロボットハンド
1日前
工機ホールディングス株式会社
作業機
21日前
株式会社不二越
ロボットに用いる伝送路
14日前
株式会社マキタ
回転打撃工具
24日前
株式会社マキタ
現場用作業機
10日前
川崎重工業株式会社
ワーク搬送ロボット
21日前
山九株式会社
レンチ保持治具
24日前
株式会社マキタ
作業機
7日前
学校法人立命館
ロボットハンド制御システム
10日前
東レエンジニアリング株式会社
ツール動作機構
23日前
トヨタ自動車株式会社
モバイルマニピュレータ
14日前
株式会社人機一体
有脚ロボット
3日前
株式会社ケイズベルテック
物品定量取り分け装置
4日前
川崎重工業株式会社
監視システム
22日前
ファナック株式会社
経路データセット生成
3日前
株式会社ダイヘン
回生ユニット
22日前
NTN株式会社
リンク作動装置
24日前
株式会社マキタ
インパクト工具
14日前
積水ハウス株式会社
固定ピン保持用アタッチメント
1日前
カツデン株式会社
回転工具用治具
15日前
NTN株式会社
ピッキング装置およびピッキング方法
23日前
泰芳機械股分有限公司
コレット収納装置
8日前
パナソニック株式会社
工具及びカバー
21日前
ニデックインスツルメンツ株式会社
搬送システム
21日前
久維科技(蘇州)有限公司
締結部材打込み機
15日前
株式会社デンソー
作業装置および作業プログラム
23日前
セイコーエプソン株式会社
制御装置および制御方法
22日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ