TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025164297
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068139
出願日
2024-04-19
発明の名称
車両管理システム、車両管理方法、及び車両管理プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G06Q
50/10 20120101AFI20251023BHJP(計算;計数)
要約
【課題】車両管理システムによるサービスの品質及び継続性を向上させる。
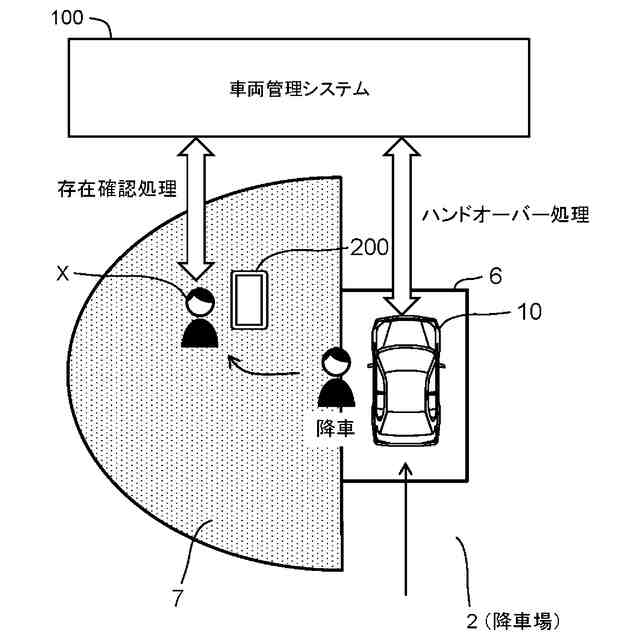
【解決手段】車両管理システムは、車両を管理する。車両管理システムは1又は複数のプロセッサを備える。1又は複数のプロセッサは、対象車両が停止位置に停止する前あるいは後に、対象車両との無線通信を確立し、対象車両を操作する権限を対象車両のユーザから車両管理システムに移行するハンドオーバー処理を開始し、停止位置に停止した対象車両から降りたユーザがハンドオーバー処理の完了まで停止位置に隣接する所定範囲に存在することを確認する存在確認処理を実行し、ユーザが完了まで所定範囲に存在することを確認した場合、ユーザに完了を通知するように構成されている。
【選択図】図3
特許請求の範囲
【請求項1】
車両を管理する車両管理システムであって、
1又は複数のプロセッサを備え、
前記1又は複数のプロセッサは、
対象車両が停止位置に停止する前あるいは後に、前記対象車両との無線通信を確立し、前記対象車両を操作する権限を前記対象車両のユーザから前記車両管理システムに移行するハンドオーバー処理を開始し、
前記停止位置に停止した前記対象車両から降りた前記ユーザが前記ハンドオーバー処理の完了まで前記停止位置に隣接する所定範囲に存在することを確認する存在確認処理を実行し、
前記ユーザが前記完了まで前記所定範囲に存在することを確認した場合、前記ユーザに前記完了を通知する
ように構成された
車両管理システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の車両管理システムであって、
前記存在確認処理は、
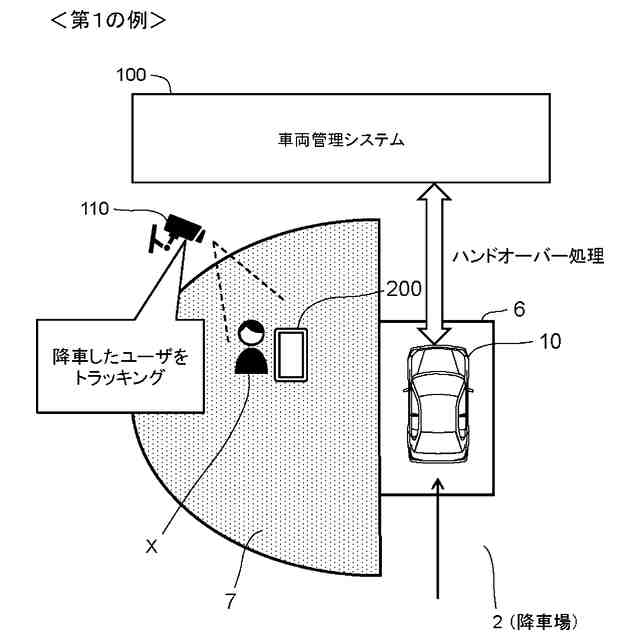
前記所定範囲を画角に含む少なくとも1つのカメラによって撮影される画像を取得することと、
前記画像に基づいて前記対象車両から降りた後の前記ユーザのトラッキングを行うことによって、前記ユーザが前記完了まで前記所定範囲に存在することを確認することと、
を含む
車両管理システム。
【請求項3】
請求項1に記載の車両管理システムであって、
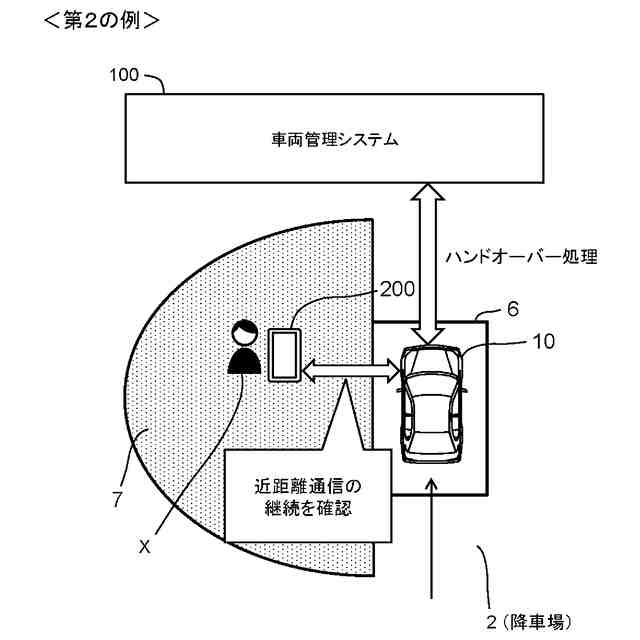
前記所定範囲は、前記対象車両と前記ユーザのユーザ端末との間の近距離通信の通信可能範囲に相当し、
前記存在確認処理は、前記対象車両と前記ユーザ端末との間の前記近距離通信が継続していることを確認することによって、前記ユーザが前記完了まで前記所定範囲に存在することを確認することを含む
車両管理システム。
【請求項4】
請求項1に記載の車両管理システムであって、
前記存在確認処理は、
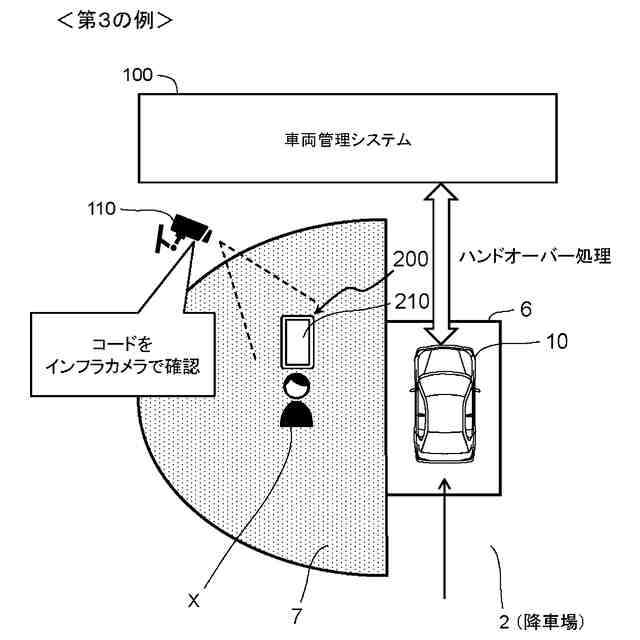
前記所定範囲の少なくとも一部を画角に含む少なくとも1つのカメラによって撮影される画像を取得することと、
前記完了の後に、前記ユーザのユーザ端末に表示された所定のコードを前記少なくとも1つのカメラに読み取らせるよう前記ユーザに要求することと、
前記ユーザ端末に前記所定のコードが表示されていることを前記画像に基づいて確認することと、
を含む
車両管理システム。
【請求項5】
請求項4に記載の車両管理システムであって、
前記少なくとも1つのカメラは、インフラカメラと、前記対象車両に搭載された車載カメラとのうち少なくとも一方を含む
車両管理システム。
【請求項6】
請求項1に記載の車両管理システムであって、
前記存在確認処理は、
第1存在確認処理と、
前記第1存在確認処理によって前記ユーザの存在が確認できなかった場合に実行される第2存在確認処理と、
を含む
車両管理システム。
【請求項7】
請求項6に記載の車両管理システムであって、
前記第1存在確認処理は、
前記所定範囲を画角に含む少なくとも1つのカメラによって撮影される画像を取得することと、
前記画像に基づいて前記対象車両から降りた後の前記ユーザのトラッキングを行うことによって、前記ユーザが前記完了まで前記所定範囲に存在することを確認することと、
を含む
車両管理システム。
【請求項8】
請求項6に記載の車両管理システムであって、
前記所定範囲は、前記対象車両と前記ユーザのユーザ端末との間の近距離通信の通信可能範囲に相当し、
前記第1存在確認処理は、前記対象車両と前記ユーザ端末との間の前記近距離通信が継続していることを確認することによって、前記ユーザが前記完了まで前記所定範囲に存在することを確認することを含む
車両管理システム。
【請求項9】
請求項6から8の何れか1つに記載の車両管理システムであって、
前記第2存在確認処理は、
前記所定範囲の少なくとも一部を画角に含む少なくとも1つのカメラによって撮影される画像を取得することと、
前記完了の後に、前記ユーザのユーザ端末に表示された所定のコードを前記少なくとも1つのカメラに読み取らせるよう前記ユーザに要求することと、
前記ユーザ端末に前記所定のコードが表示されていることを前記画像に基づいて確認することと、
を含む
車両管理システム。
【請求項10】
請求項1に記載の車両管理システムであって、
前記対象車両は、駐車場において自動バレー駐車を実行可能に構成されており、
前記停止位置は、前記駐車場に入庫する前記対象車両が停止する位置である
車両管理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両を管理する技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1は、サーバを有する自動駐車システムを開示している。サーバは、予約ユーザから自動運転車両の入庫予約を受け付けた後、予約ユーザに認証コードを送信する。その後、駐車場内で認証コードを用いたチェックインが行われた場合、サーバは、駐車場内の予約ユーザの自動運転車両に対して自動バレーパーキングの指示を開始する。
【0003】
また、特許文献2は、自動バレーパーキングを行う方法を開示している。この方法は、自動バレーパーキングを開始するステップを含んでいる。そして、このステップは、インフラストラクチャが車両のドライバ及び車両を認識するステップを含んでいる。
【先行技術文献】
【特許文献】
【0004】
特開2021-064117号公報
特開2020-075717号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
対象車両を操作する権限を対象車両のユーザから車両管理システムに移行する「ハンドオーバー処理」について考える。基本的には、ハンドオーバー処理が完了すれば、車両管理システムは対象車両を操作することを許される。ただし、車両管理システムが対象車両をそのまま操作することが適切ではない状況も考えられる。そのような状況では、対象車両を適切な状態にするための追加処置をユーザに実施してもらう必要がある。しかしながら、ユーザが既にその場を離れてしまっていたとしたら、追加処置を直ぐに実施することができず、対象車両の操作もできない状態に陥ってしまう。対象車両を勝手に動かすこともできず、対象車両がその場でスタックしてしまうと、車両管理システムによるサービスが停止してしまう。
【課題を解決するための手段】
【0006】
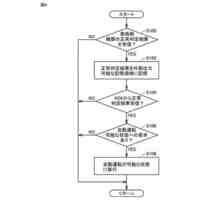
本開示に係る車両管理システムは、車両を管理する。車両管理システムは1又は複数のプロセッサを備える。1又は複数のプロセッサは、対象車両が停止位置に停止する前あるいは後に、対象車両との無線通信を確立し、対象車両を操作する権限を対象車両のユーザから車両管理システムに移行するハンドオーバー処理を開始し、停止位置に停止した対象車両から降りたユーザがハンドオーバー処理の完了まで停止位置に隣接する所定範囲に存在することを確認する存在確認処理を実行し、ユーザが完了まで所定範囲に存在することを確認した場合、ユーザに完了を通知するように構成されている。
【0007】
本開示に係る車両管理方法は、コンピュータが車両を管理するための方法である。車両管理方法は、対象車両が停止位置に停止する前あるいは後に、対象車両との無線通信を確立し、対象車両を操作する権限を対象車両のユーザから車両管理システムに移行するハンドオーバー処理を開始することと、停止位置に停止した対象車両から降りたユーザがハンドオーバー処理の完了まで停止位置に隣接する所定範囲に存在することを確認する存在確認処理を実行することと、ユーザが完了まで所定範囲に存在することを確認した場合、ユーザに完了を通知することと、を含む。
【0008】
本開示に係る車両管理プログラムは、車両を管理するコンピュータにより実行される。車両管理プログラムは、対象車両が停止位置に停止する前あるいは後に、対象車両との無線通信を確立し、対象車両を操作する権限を対象車両のユーザから車両管理システムに移行するハンドオーバー処理を開始することと、停止位置に停止した対象車両から降りたユーザがハンドオーバー処理の完了まで停止位置に隣接する所定範囲に存在することを確認する存在確認処理を実行することと、ユーザが完了まで所定範囲に存在することを確認した場合、ユーザに完了を通知することと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、仮に、ハンドオーバー処理が完了したときに対象車両が適切な状態でなかったとしても、所定範囲内(すなわち、対象車両の近く)に存在することが既に確認されているユーザに対して、対象車両を適切な状態にするための追加処置の実施を速やかに依頼することが可能となる。このことは、対象車両を操作できないまま、対象車両がその場でスタックしてしまう、といった事態の発生を抑制できることにつながる。これは、車両管理システムによるサービスの品質及び継続性の観点から望ましい。
【図面の簡単な説明】
【0010】
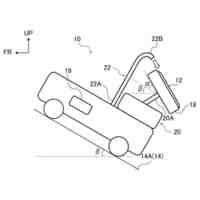
実施の形態に係る車両管理システムの概要を説明するための概念図である。
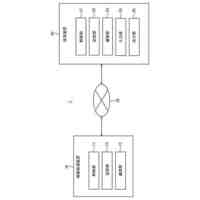
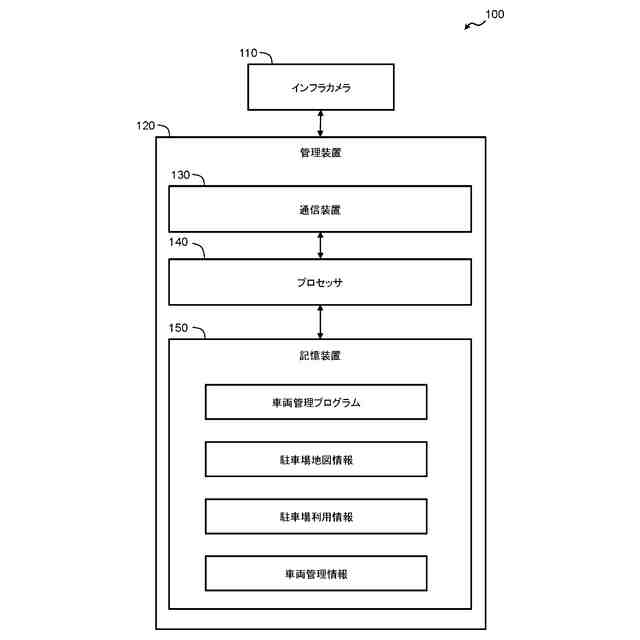
実施の形態に係る車両管理システムの構成例を示すブロック図である。
ハンドオーバー処理に関する課題への対策を説明するための概念図である。
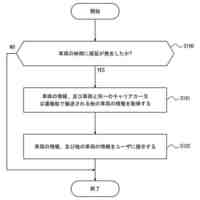
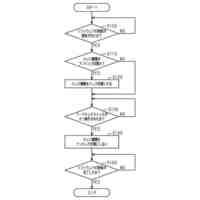
実施の形態に係る車両管理システムにおいて実行される処理の一例を示すフローチャートである。
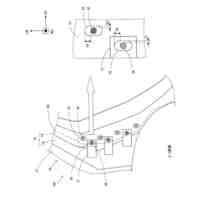
存在確認処理の第1の例を説明するための概念図である。
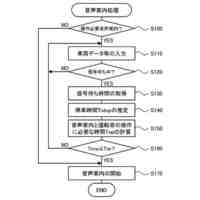
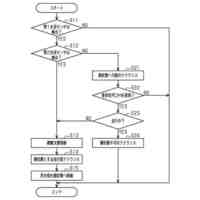
第1の例に係る存在確認処理の流れの一例を示すフローチャートである。
存在確認処理の第2の例を説明するための概念図である。
第2の例に係る存在確認処理の流れの一例を示すフローチャートである。
存在確認処理の第3の例を説明するための概念図である。
第3の例に係る存在確認処理の流れの一例を示すフローチャートである。
存在確認処理の第4の例を説明するための概念図である。
第4の例に係る存在確認処理の流れの一例を示すフローチャートである。
複数種類の存在確認処理の組み合わせが用いられる場合の処理の流れの一例を示すフローチャートである。
第1の組み合わせ例に係る第1及び第2存在確認処理の流れの一例を示すフローチャートである。
第2の組み合わせ例に係る第1及び第2存在確認処理の流れの一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
電池
28日前
トヨタ自動車株式会社
椅子
22日前
トヨタ自動車株式会社
方法
14日前
トヨタ自動車株式会社
電池
29日前
トヨタ自動車株式会社
治具
7日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車体
15日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
方法
12日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
正極層
12日前
トヨタ自動車株式会社
電解液
1か月前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
自動車
13日前
トヨタ自動車株式会社
固定子
27日前
トヨタ自動車株式会社
飛行体
19日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
加熱器
26日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ