TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025164367
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068298
出願日
2024-04-19
発明の名称
情報処理装置、情報処理方法およびプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
B60W
40/06 20120101AFI20251023BHJP(車両一般)
要約
【課題】道路環境の認識精度とコストを両立させる。
【解決手段】第一の車両が有する車載カメラが取得した画像に基づいて、所定の対象物を認識する第一の処理を行い、前記画像に含まれる領域のうち、前記第一の車両が走行することが予測される道路領域を少なくとも含む第一の領域について、認識精度を向上させるための第二の処理を行う。
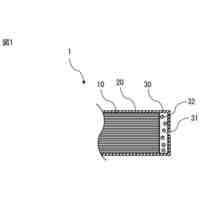
【選択図】図1
特許請求の範囲
【請求項1】
第一の車両が有する車載カメラが取得した画像に基づいて、所定の対象物を認識する第一の処理を行うことと、
前記画像に含まれる領域のうち、前記第一の車両が走行することが予測される道路領域を少なくとも含む第一の領域について、認識精度を向上させるための第二の処理を行うことと、
を実行する制御部を有する、
情報処理装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第一の領域は、前記第一の車両からの距離が所定値以上離れている領域を少なくとも含む、
請求項1に記載の情報処理装置。
【請求項3】
前記制御部は、前記第一の車両の予定経路に基づいて、前記画像中における前記第一の領域を決定する、
請求項1に記載の情報処理装置。
【請求項4】
前記制御部は、前記第一の車両から取得した車両データに基づいて、前記画像中における前記第一の領域を決定する、
請求項1に記載の情報処理装置。
【請求項5】
前記制御部は、前記第一の車両の近傍に位置する第二の車両が走行している車線に対応する第二の道路領域を含むように前記第一の領域を設定する、
請求項1に記載の情報処理装置。
【請求項6】
前記第二の処理は、前記第一の処理に対して、画像認識のためのリソースを増加させた処理である、
請求項1に記載の情報処理装置。
【請求項7】
前記第一の処理は、機械学習モデルを利用して実行される処理であり、
前記第二の処理は、前記第一の領域に含まれる対象物が前記第一の車両に接近したタイミングで前記機械学習モデルを再学習する処理である、
請求項1に記載の情報処理装置。
【請求項8】
前記第一の処理は、道路領域を認識する処理であり、
前記第二の処理は、前記第一の処理で使用していない情報ソースを利用して、前記第一の領域に含まれる道路領域の認識結果を補正する処理である、
請求項1に記載の情報処理装置。
【請求項9】
第一の車両と通信可能な情報処理装置が実行する情報処理方法であって、
前記第一の車両が有する車載カメラが取得した画像に基づいて、所定の対象物を認識する第一の処理を行うことと、
前記画像に含まれる領域のうち、前記第一の車両が走行することが予測される道路領域を少なくとも含む第一の領域について、認識精度を向上させるための第二の処理を行うことと、
を含む、情報処理方法。
【請求項10】
前記第一の領域は、前記第一の車両からの距離が所定値以上離れている領域を少なくとも含む、
請求項9に記載の情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両技術に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
道路環境をセンシングしながら、リアルタイムで道路地図データを生成する技術がある。これに関連して、例えば、特許文献1には、画像認識結果に対して、走行環境に応じた重み付け補正を行い、補正結果に基づいて道路区画線を認識する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-194815号公報
特開2023-117563号公報
特開2020-118890号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、道路環境の認識精度とコストを両立させることを目的とする。
【課題を解決するための手段】
【0005】
本開示の一態様は、
第一の車両が有する車載カメラが取得した画像に基づいて、所定の対象物を認識する第一の処理を行うことと、前記画像に含まれる領域のうち、前記第一の車両が走行することが予測される道路領域を少なくとも含む第一の領域について、認識精度を向上させるための第二の処理を行うことと、を実行する制御部を有する、情報処理装置である。
【0006】
本開示の一態様は、
第一の車両と通信可能な情報処理装置が実行する情報処理方法であって、
前記第一の車両が有する車載カメラが取得した画像に基づいて、所定の対象物を認識する第一の処理を行うことと、前記画像に含まれる領域のうち、前記第一の車両が走行することが予測される道路領域を少なくとも含む第一の領域について、認識精度を向上させるための第二の処理を行うことと、を含む、情報処理方法である。
【0007】
また、他の態様として、上記の情報処理方法をコンピュータに実行させるためのプログラム、または、該プログラムを非一時的に記憶したコンピュータ可読記憶媒体が挙げられる。
【発明の効果】
【0008】
本開示によれば、道路環境の認識精度とコストを両立させることができる。
【図面の簡単な説明】
【0009】
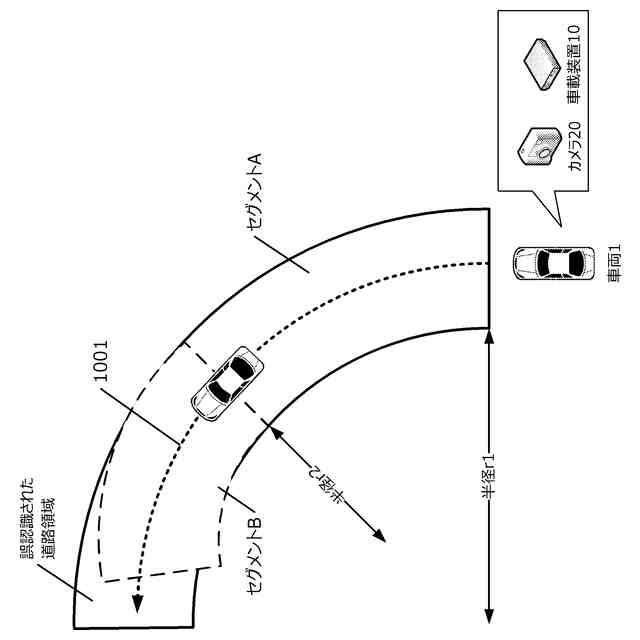
本開示における課題を説明するための図。
本開示における課題を説明するための図。
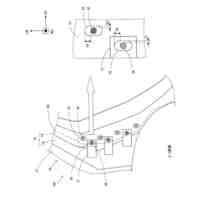
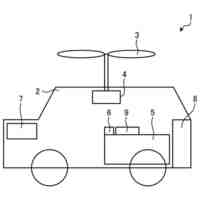
車載装置10の構成を説明する図。
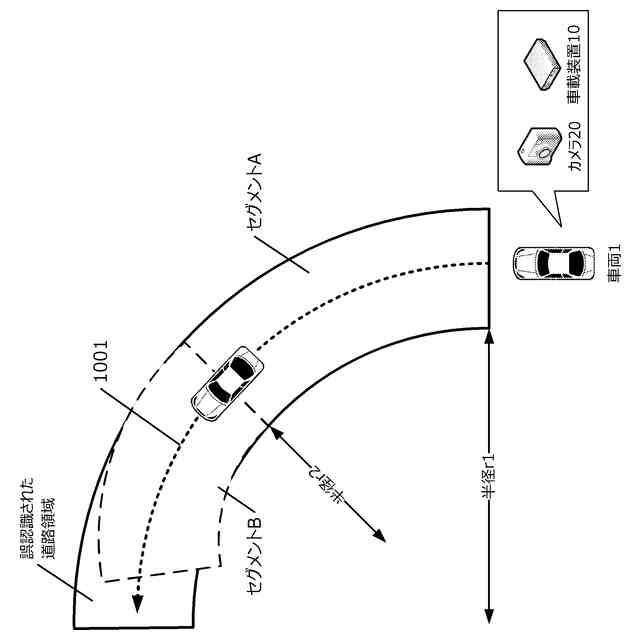
第一の実施形態における追加処理の概要を説明する図。
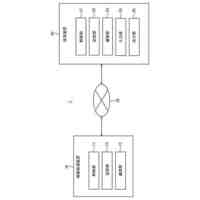
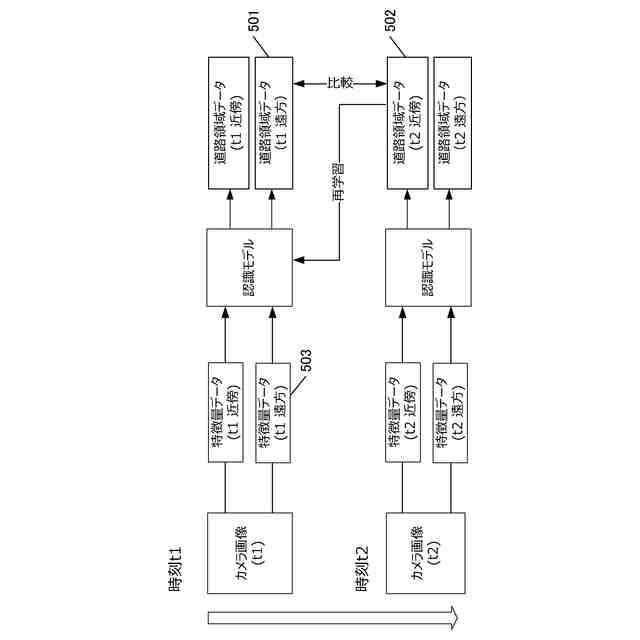
車載装置10におけるデータの流れを説明する図。
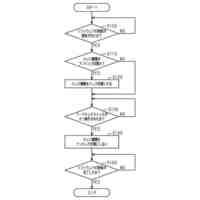
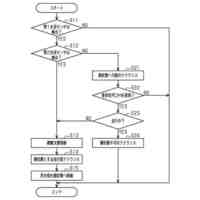
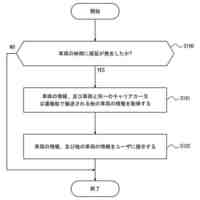
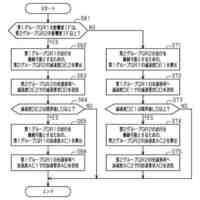
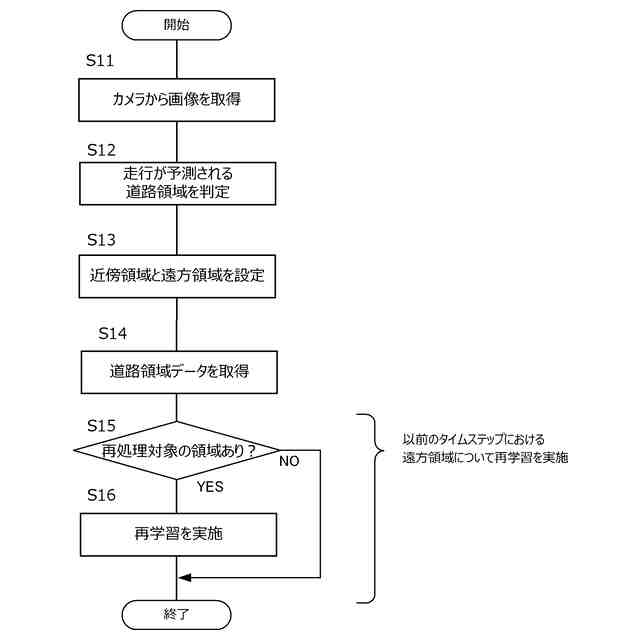
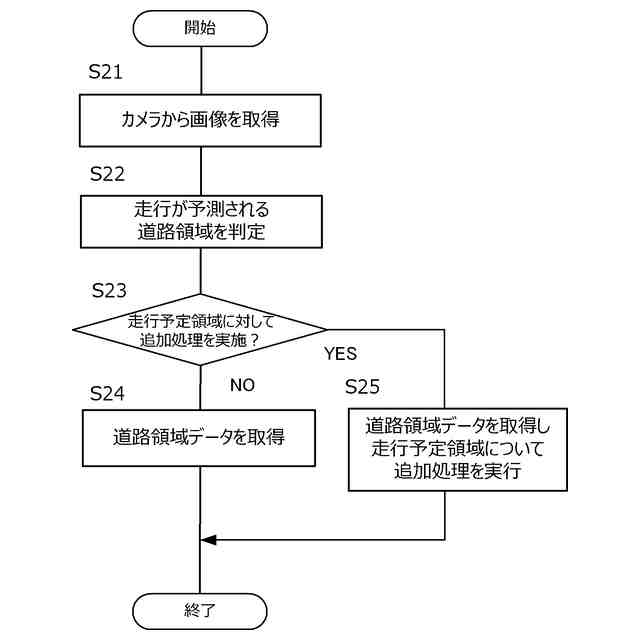
第一の実施形態で車載装置10が実行する処理のフローチャート。
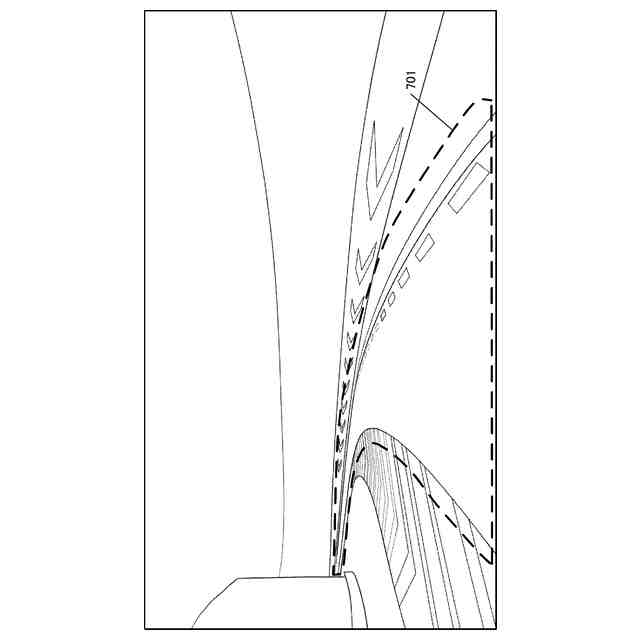
第二の実施形態における処理の概要を説明する図。
第二の実施形態における処理の概要を説明する図。
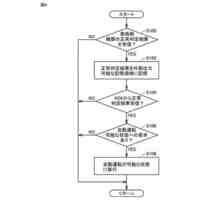
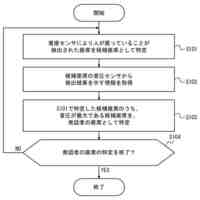
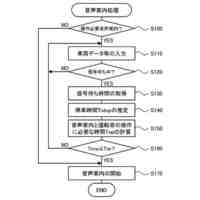
第二の実施形態で車載装置10が実行する処理のフローチャート。
第二の実施形態の変形例における処理の概要を説明する図。
第三の実施形態で車載装置10が実行する処理のフローチャート。
【発明を実施するための形態】
【0010】
近年、車両が予め設定された経路に沿って自律的に走行を行う自律走行システムに関する研究が進められている。自律走行においては、車両は、予め記憶された道路マップと、道路環境をセンシングした結果とを比較することで、自車両の位置や姿勢を判定する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
椅子
22日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車体
15日前
トヨタ自動車株式会社
治具
7日前
トヨタ自動車株式会社
方法
14日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池
28日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
方法
12日前
トヨタ自動車株式会社
モータ
9日前
トヨタ自動車株式会社
電磁弁
22日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
固定子
27日前
トヨタ自動車株式会社
正極層
12日前
トヨタ自動車株式会社
加熱器
26日前
トヨタ自動車株式会社
電動車
22日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
電動機
12日前
トヨタ自動車株式会社
飛行体
19日前
トヨタ自動車株式会社
サーバ
9日前
トヨタ自動車株式会社
自動車
13日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ