TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025002741
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103082
出願日
2023-06-23
発明の名称
重心表示システム
出願人
トヨタ自動車株式会社
,
学校法人藤田学園
代理人
個人
主分類
A61B
5/11 20060101AFI20241226BHJP(医学または獣医学;衛生学)
要約
【課題】トレッドミルに配設された荷重分布センサでの検知結果に基づきユーザの足裏の重心座標を算出し、表示する場合において、その重心座標の移動の視認性を向上させることが可能な重心表示システムを提供する。
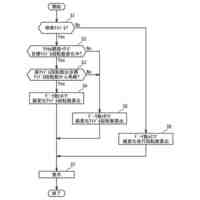
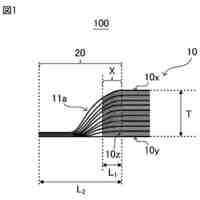
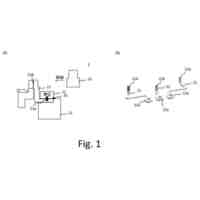
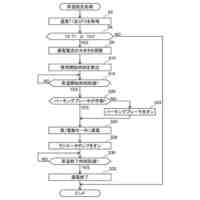
【解決手段】重心表示システム10は、表示部11と、制御部12と、を備える。制御部12は、トレッドミルに配設されトレッドミルの上面にかかる荷重を測定する荷重分布センサから、荷重分布データを時系列で入力する。制御部12は、トレッドミル上でのユーザの移動速度を入力する。制御部12は、荷重分布データが示すユーザの片脚の足裏の重心座標の表示位置が、片脚についての1つの立脚期において時間によらず同じ基準位置に対する相対位置となるように、移動速度に基づき移動方向と逆方向に重心座標をずらした状態で、重心座標の軌跡を表示部11に表示させる。
【選択図】図1
特許請求の範囲
【請求項1】
表示部と、制御部と、を備え、
前記制御部は、
トレッドミルに配設され前記トレッドミルの上面にかかる荷重を測定する荷重分布センサから、荷重分布データを時系列で入力し、
前記トレッドミル上でのユーザの移動速度を入力し、
前記荷重分布データが示す前記ユーザの片脚の足裏の重心座標の表示位置が、前記片脚についての1つの立脚期において時間によらず同じ基準位置に対する相対位置となるように、前記移動速度に基づき移動方向と逆方向に前記重心座標をずらした状態で、前記重心座標の軌跡を前記表示部に表示させる、
重心表示システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、重心表示システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、トレッドミルと、トレッドミルにかかる反力を測定する床反力センサと、ユーザの下肢に装着される脚ロボットと、脚ロボットが装着された下肢を撮影する距離計測センサと、ユーザに装着されるセンサを用いることなくユーザの足裏荷重を推定する荷重推定手段と、を備えた歩行リハビリシステムが開示されている。
【0003】
ここで、上記荷重推定手段は、床反力センサ及び距離計測センサを用いて測定した、床反力の合力、及びその重心位置、並びにユーザの左右の下腿のそれぞれの足裏荷重の重心位置、から床反力センサの測定値及び距離計測センサの計測結果に基づいてユーザの左右の下肢のそれぞれの足裏荷重を推定する。
【先行技術文献】
【特許文献】
【0004】
特許第6187208号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のシステムでは、ユーザの左右の足裏のそれぞれにおける荷重の重心位置を算出することはできるが、その軌跡を表示することに関しては全く考慮されていない。
【0006】
そこで、本発明者は、トレッドミルに配設される荷重分布センサを用いてユーザの左右の足裏のそれぞれにおける荷重の重心位置を算出し、その軌跡を表示する方法について考察した。
【0007】
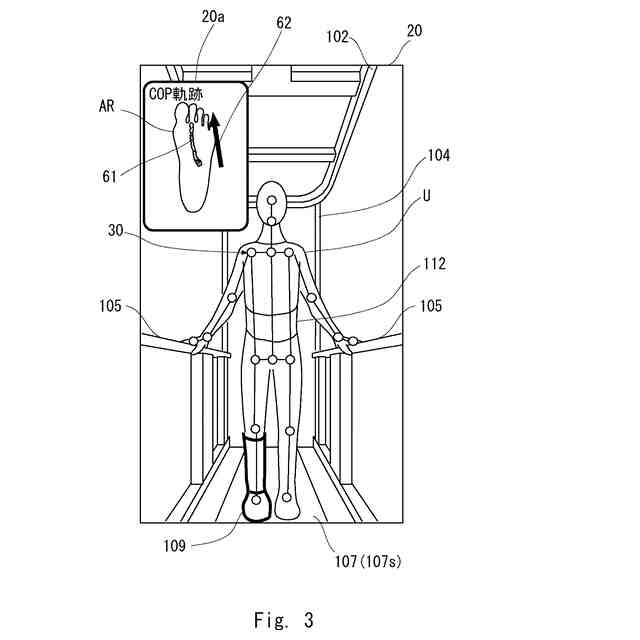
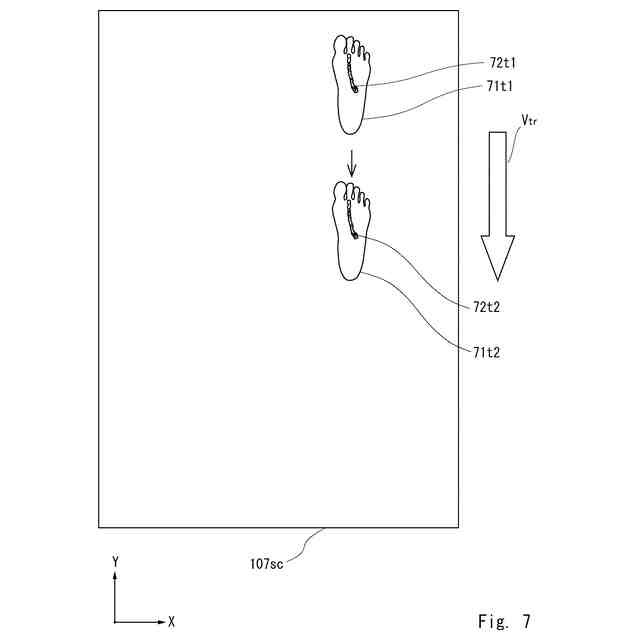
しかしながら、足裏のトレッドミル上での位置はユーザの移動に伴い進行方向逆向きに移動するため、足裏の重心位置を表示した場合には重心位置も同様に全体的に移動することになり、ユーザやその介助者にとって足裏の重心位置の軌跡が視認し難くなる。特に、通常、ユーザは踵から接地するため、トレッドミルの進行方向(前方から後方へ向かう方向)と足裏の重心位置の移動方向(足裏の後方から前方へ向かう方向)が相反することから、ユーザやその介助者が重心移動を視認し難い。そのため、例えば、介助者がユーザに誤ったアドバイスを与えてしまうこともある。
【0008】
本開示は、このような問題を解決するためになされたもので、その目的は、トレッドミルに配設された荷重分布センサでの検知結果に基づきユーザの足裏の重心座標を算出し、表示する場合において、その重心座標の移動の視認性を向上させることが可能な重心表示システムを提供することにある。
【課題を解決するための手段】
【0009】
本開示の一態様に係る重心表示システムは、表示部と、制御部と、を備え、前記制御部は、トレッドミルに配設され前記トレッドミルの上面にかかる荷重を測定する荷重分布センサから、荷重分布データを時系列で入力し、前記トレッドミル上でのユーザの移動速度を入力し、前記荷重分布データが示す前記ユーザの片脚の足裏の重心座標の表示位置が、前記片脚についての1つの立脚期において時間によらず同じ基準位置に対する相対位置となるように、前記移動速度に基づき移動方向と逆方向に前記重心座標をずらした状態で、前記重心座標の軌跡を前記表示部に表示させる、ものである。
【0010】
上記の重心表示システムでは、トレッドミルに配設された荷重分布センサでの検知結果に基づきユーザの足裏の重心座標を算出し、表示する場合において、上記の移動速度に基づき移動方向と逆方向に重心座標をずらした状態で、重心座標の軌跡を表示部に表示させるため、その重心座標の移動の視認性を向上させることができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
17日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
17日前
トヨタ自動車株式会社
方法
10日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
モータ
17日前
トヨタ自動車株式会社
負極層
17日前
トヨタ自動車株式会社
電動車
14日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
報知装置
14日前
トヨタ自動車株式会社
溶接装置
3日前
トヨタ自動車株式会社
駆動装置
17日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
スペーサ
14日前
トヨタ自動車株式会社
車両構造
7日前
トヨタ自動車株式会社
給電装置
14日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
路側装置
10日前
トヨタ自動車株式会社
路側装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
更新装置
10日前
トヨタ自動車株式会社
液系電池
7日前
トヨタ自動車株式会社
ステータ
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ