TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025029231
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2023133727
出願日
2023-08-21
発明の名称
ロボットアーム
出願人
国立大学法人 東京大学
代理人
個人
,
個人
主分類
B25J
9/02 20060101AFI20250227BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業用のプラットフォームを構築できるロボットアームを提供する。
【解決手段】
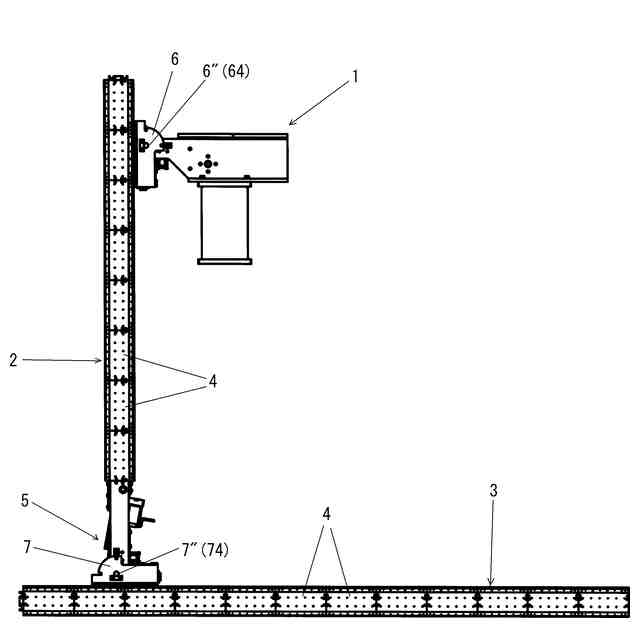
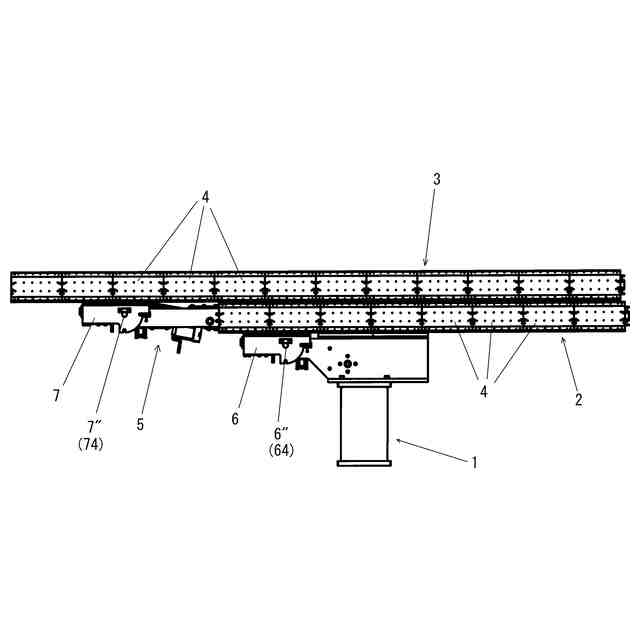
ベース1と、第1関節部においてベース1に対して回動可能に連結された第1アーム2と、第2関節部において第1アーム2に対して回動可能に連結された第2アーム3と、を備えたロボットアームであって、第1アーム2は、第1関節部に対して、第1アーム2の長さ方向に可動であり、第2アーム3は、第2関節部に対して、第2アーム3の長さ方向に可動であり、べース1、第1アーム2、第2アーム3が重畳した第1姿勢と、第1アーム2がベース1に対して上下方向に延び、第2アーム3が第1アーム2の下端に位置して水平ないし傾斜状に延びる第2姿勢と、の間で変態可能である。
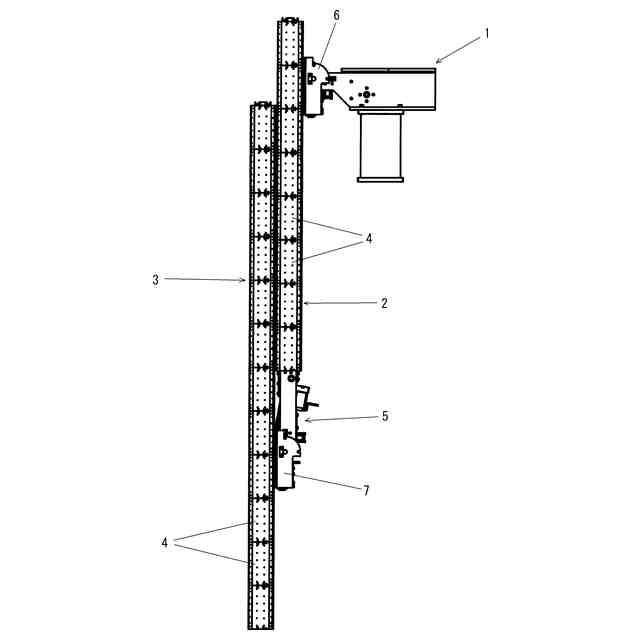
【選択図】図4
特許請求の範囲
【請求項1】
ベースと、
第1関節部において前記ベースに対して回動可能に連結された第1アームと、
第2関節部において前記第1アームに対して回動可能に連結された第2アームと、
を備え、
前記第1アームは、前記第1関節部に対して、当該第1アームの長さ方向に可動であり、
前記第2アームは、前記第2関節部に対して、当該第2アームの長さ方向に可動であり、
前記べース、前記第1アーム、前記第2アームが重畳した第1姿勢と、
前記第1アームが前記ベースに対して上下方向に延び、前記第2アームが前記第1アームの端部に位置して水平ないし傾斜状に延びる第2姿勢と、の間で変態可能である、
ロボットアーム。
続きを表示(約 1,200 文字)
【請求項2】
第1アームを回動させる回動駆動機構と、第1アームをスライド移動させる送り出し機構と、からなる第1アーム駆動機構と、
第2アームを回動させる回動駆動機構と、第2アームをスライド移動させる送り出し機構と、からなる第2アーム駆動機構と、
を備えている、
請求項1に記載のロボットアーム。
【請求項3】
前記第1関節部は、前記ベースの先端に設けた第1回動部を含み、
前記第1アームは、前記第1回動部上で当該第1回動部に対してスライド可能であり、かつ、前記第1回動部と一体で回動することで、前記ベースに対して回動可能となっており、
前記第2関節部は、前記第1アームの先端に設けた第2回動部を含み、
前記第2アームは、前記第2回動部上で当該第2回動部に対してスライド可能であり、かつ、前記第2回動部と一体で回動することで、前記第2アームに対して回動可能となっている、
請求項1に記載のロボットアーム。
【請求項4】
前記ベースは、前記第1回動部の回動駆動機構を備えており、
前記第1アームは、前記第2回動部の回動駆動機構を備えている、
請求項3に記載のロボットアーム。
【請求項5】
前記第1回動部は、第1ガイド機構の第1要素と、第1アーム送り出し機構の第1要素を備えており、
前記第1アームは、第1ガイド機構の第2要素と、第1アーム送り出し機構の第2要素を備えており、
前記第2回動部は、第2ガイド機構の第1要素と、第2アーム送り出し機構の第1要素を備えており、
前記第2アームは、第2ガイド機構の第2要素と、第2アーム送り出し機構の第2要素を備えている、
請求項3に記載のロボットアーム。
【請求項6】
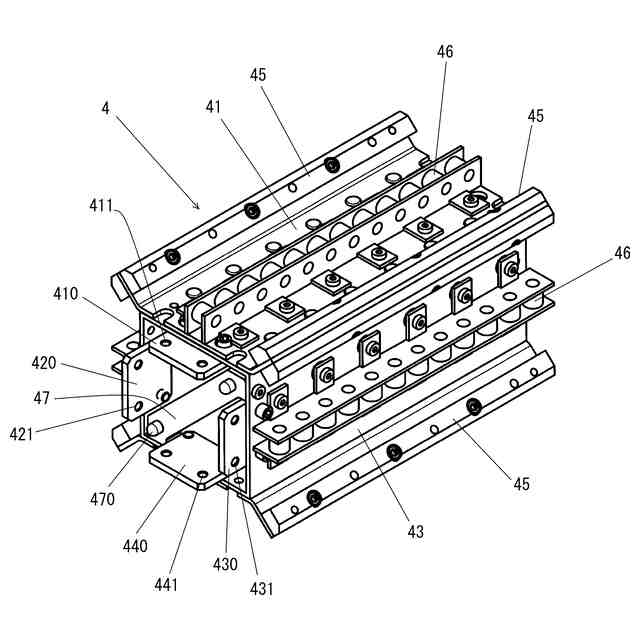
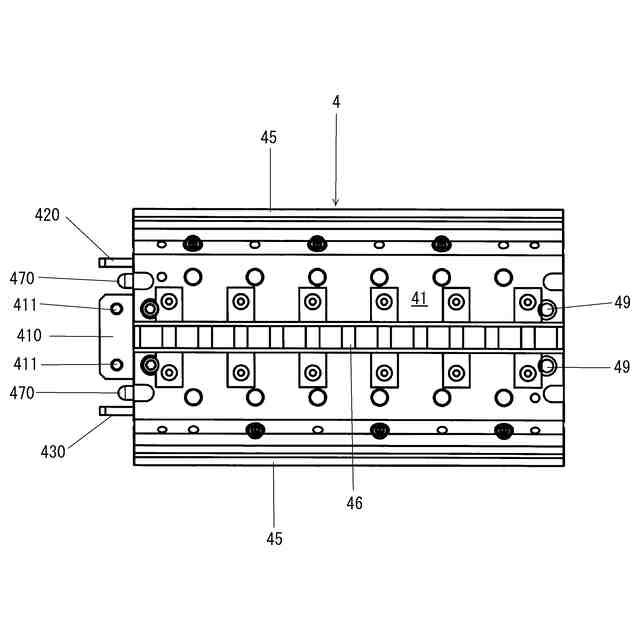
少なくとも前記第2アームは、作業用ロボットの走行用レールを備えている、
請求項1~5いずれか1項に記載のロボットアーム。
【請求項7】
前記第1アーム、前記第2アームのいずれか一方あるいは両方は、複数のモジュールを長さ方向に着脱可能に接続して形成されている、
請求項6に記載のロボットアーム。
【請求項8】
前記第2アームは、複数のモジュールと、先端側のモジュールに連結された第2ベースと、からなり、
前記第2回動部は前記第2ベースに設けられている、
請求項7に記載のロボットアーム。
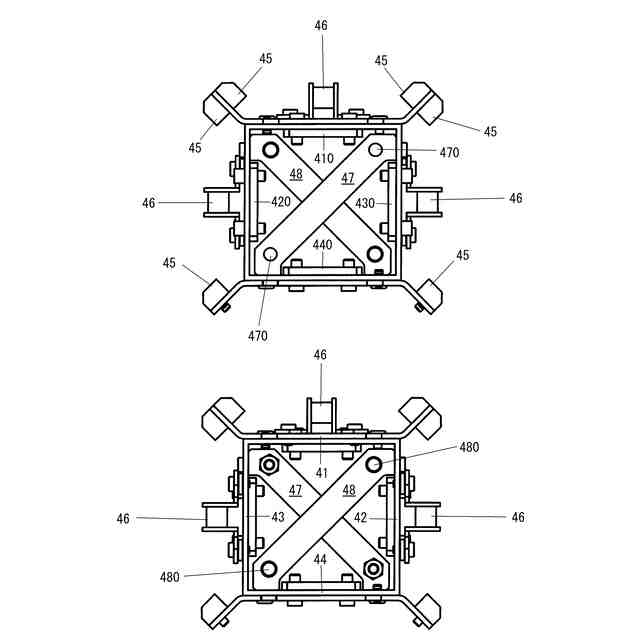
【請求項9】
前記モジュールは、直方体状の本体と、少なくとも2面に設けたレールユニット及びラックユニットと、からなる、
請求項7に記載のロボットアーム。
【請求項10】
前記ベースは、当該ベースの長さ方向に直交する方向に延びる仮設レール上に沿って移動可能である、
請求項1~5いずれか1項に記載のロボットアーム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットアームに係り、詳しくは、作業用のプラットフォームを提供するロボットアームに関するものである。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
高所作業や危険な場所での作業をロボットで代行しようという試みがある。しかしながら、必ずしも全ての作業環境にロボットを導入できるわけではない。例えば、橋梁の保守点検や補修においては、ロボットが橋梁裏にアクセスすることが困難なため、全て人の手作業で行うという課題があった。特許文献1には、作業員のための可動吊り足場が開示されており、特許文献2には、橋梁裏を点検するために人が搭乗可能な橋梁点検車両が開示されており、いずれも人による作業が前提となっている。
【0003】
作業用ロボットを、本来、作業用ロボットがアクセスできない環境に導入するためのプラットフォームを提供できれば、ロボットを導入できる作業環境を拡張することができる。また、作業用ロボットのアクセスが困難な環境は橋梁裏に限定されるものではなく、足場の無い大型建造物(大型の化学反応槽、発電所等)における作業環境が例示される。
特開平8-68198
特開2003-128392
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、作業用のプラットフォームを構築できるロボットアームを提供することを目的とするものである。
【課題を解決するための手段】
【0005】
本発明が採用した技術手段は、
ベースと、
第1関節部において前記ベースに対して回動可能に連結された第1アームと、
第2関節部において前記第1アームに対して回動可能に連結された第2アームと、
を備え、
前記第1アームは、前記第1関節部に対して、当該第1アームの長さ方向に可動であり、
前記第2アームは、前記第2関節部に対して、当該第2アームの長さ方向に可動であり、
前記べース、前記第1アーム、前記第2アームが重畳した第1姿勢と、
前記第1アームが前記ベースに対して上下方向に延び、前記第2アームが前記第1アームの端部に位置して水平ないし傾斜状に延びる第2姿勢と、の間で変態可能である、
ロボットアーム、である。
【0006】
1つの態様では、前記作業姿勢において、前記ベースは水平姿勢にあり、前記第1アームは前記ベースに対して上下方向(典型的には垂直)に延びる。前記ベースに対する前記第1アームの高さ位置は高さ方向に可変である。
本明細書において、「上下方向」が意味するところは、典型的な態様では垂直方向であるが、全体として上下方向(高さ方向)に延びるものであれば、傾斜状に高さ方向に延びる場合を含む。
1つの態様では、前記作業姿勢において、前記第2アームは、前記第1アームの下端から水平ないし傾斜状に延びている。前記第1アームの下端に対する前記第2アームの長さ方向の位置は可変である。
1つの態様では、前記作業姿勢において、前記第2アームは、前記ベースの下方に対向して位置している(橋梁下面)。
1つの態様では、前記作業姿勢において、前記第2アームは、前記第1アームに対して、前記ベースと反対側に位置している(化学反応槽等)。
典型的な態様では、第1関節部の可動範囲は0度から90度であり、第1アームは、ベースの長さ方向に対して0度から90度の範囲の姿勢を取り得る。
典型的な態様では、第2関節部の可動範囲は0度から90度であり、第2アームは、第1アームの長さ方向に対して0度から90度の範囲の姿勢を取り得る。
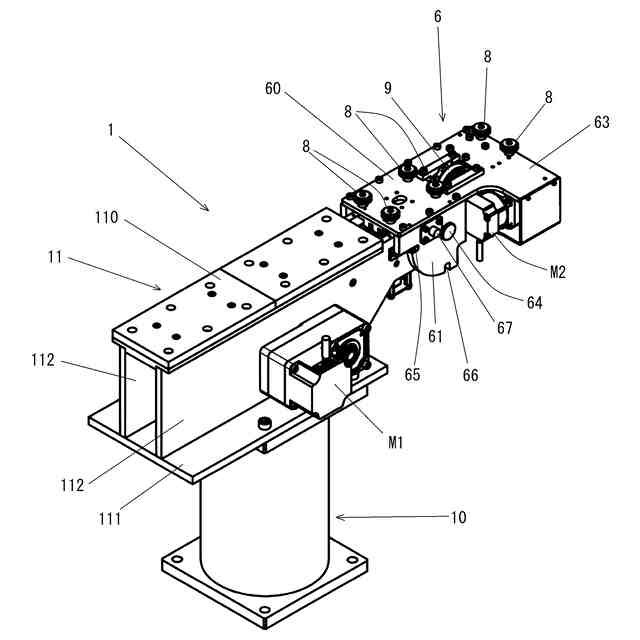
【0007】
1つの態様では、
第1アームを回動させる回動駆動機構と、第1アームをスライド移動させる送り出し機構と、からなる第1アーム駆動機構と、
第2アームを回動させる回動駆動機構と、第2アームをスライド移動させる送り出し機構と、からなる第2アーム駆動機構と、
を備えている。
【0008】
1つの態様では、
前記第1関節部は、前記ベースの先端に設けた第1回動部を含み、
前記第1アームは、前記第1回動部上で当該第1回動部に対してスライド可能であり、かつ、前記第1回動部と一体で回動することで、前記ベースに対して回動可能となっており、
前記第2関節部は、前記第1アームの先端に設けた第2回動部を含み、
前記第2アームは、前記第2回動部上で当該第2回動部に対してスライド可能であり、かつ、前記第2回動部と一体で回動することで、前記第2アームに対して回動可能となっている。
【0009】
1つの態様では、前記ベースは、前記第1回動部の回動駆動機構を備えており、
前記第1アームは、前記第2回動部の回動駆動機構を備えている。
1つの態様では、前記第1回動部は、前記ベースの長さ方向に沿う第1姿勢と、前記ベースの長さ方向に垂直の第2姿勢と、の間で回動可能である。
1つの態様では、前記第1回動部は、第1姿勢、あるいは/および、第2姿勢を維持するロック手段を備えている。
1つの態様では、前記第1回動部は、第1姿勢と第2姿勢の間の傾斜姿勢で固定可能であってもよい。
1つの態様では、前記第2回動部は、前記第1アームの長さ方向に沿う第1姿勢と、前記第2アームの長さ方向に垂直の第2姿勢と、の間で回動可能である。
1つの態様では、前記第2回動部は、第1姿勢、あるいは/および、第2姿勢を維持するロック手段を備えている。
1つの態様では、前記第2回動部は、第1姿勢と第2姿勢の間の傾斜姿勢で固定可能であってもよい。
【0010】
1つの態様では、
前記第1回動部は、第1ガイド機構の第1要素と、第1アーム送り出し機構の第1要素を備えており、
前記第1アームは、第1ガイド機構の第2要素と、第1アーム送り出し機構の第2要素を備えており、
前記第2回動部は、第2ガイド機構の第1要素と、第2アーム送り出し機構の第1要素を備えており、
前記第2アームは、第2ガイド機構の第2要素と、第2アーム送り出し機構の第2要素を備えている。
1つの態様では、前記ガイド機構の第1要素はガイドローラであり、第2要素はガイドレールである。
1つの態様では、前記アーム送り出し機構の第1要素はギアであり、第2要素はラックである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 東京大学
担持金属触媒
23日前
国立大学法人 東京大学
ガス処理方法
9日前
国立大学法人 東京大学
コンパレータ回路
13日前
国立大学法人 東京大学
ビーム追従システム
4日前
国立大学法人 東京大学
超音波モータシステム
1か月前
国立大学法人 東京大学
超音波モータシステム
1か月前
国立大学法人 東京大学
超音波モータシステム
1か月前
国立大学法人 東京大学
肝臓オルガノイド成熟培地
3日前
国立大学法人 東京大学
推定装置、及びプログラム
24日前
国立大学法人 東京大学
テラヘルツ帯同期検波回路
1か月前
国立大学法人 東京大学
テラヘルツ波帯位相変調回路
1か月前
NTT株式会社
圧力センサ
24日前
国立大学法人 東京大学
接着性細胞の浮遊培養用基材
9日前
国立大学法人 東京大学
読出回路及び磁気メモリ装置
23日前
国立大学法人 東京大学
ドローンを用いた配送システム
9日前
国立大学法人 東京大学
情報処理装置、及びプログラム
1か月前
積水化学工業株式会社
酸素発生剤
1か月前
国立大学法人 東京大学
光デバイス及びコヒーレント受信器
1か月前
古河電気工業株式会社
超電導モータ
1か月前
国立大学法人 東京大学
通信装置、制御方法、及びプログラム
3日前
国立大学法人 東京大学
手指アシスト装置および関節動作支援方法
1か月前
太平洋セメント株式会社
セメント組成物
23日前
国立大学法人 東京大学
ガス成分検知装置及びガス成分計測システム
1か月前
国立大学法人 東京大学
イオントラップ装置及びイオントラップシステム
5日前
三菱ケミカル株式会社
化合物及びその製造方法
1か月前
国立大学法人 東京大学
情報処理システム、情報処理方法及びプログラム
23日前
国立大学法人 東京大学
フラビウイルスに対するアプタマー及びその使用
2日前
国立大学法人 東京大学
情報処理デバイス、情報処理方法及びプログラム
1か月前
国立大学法人 東京大学
プログラム、情報処理方法及び情報処理システム
1か月前
NTT株式会社
通信システム、方法及びプログラム
9日前
NTT株式会社
通信システム、方法及びプログラム
9日前
国立大学法人 東京大学
タイムストレッチ分光装置及びタイムストレッチ分光法
1か月前
NTT株式会社
座屈剥離構造の予測装置および予測方法
9日前
NTT株式会社
電子署名システム、方法及びプログラム
9日前
国立大学法人 東京大学
マイクロ粒子
11日前
国立大学法人 東京大学
免疫グロブリン
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ