TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025057858
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167656
出願日
2023-09-28
発明の名称
照準投射システム及び照準投射方法
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
F41G
9/02 20060101AFI20250402BHJP(武器)
要約
【課題】目標位置を好適に捕捉し、照準精度を向上させ、投射物の着地予測点への投射を精度よく行う。
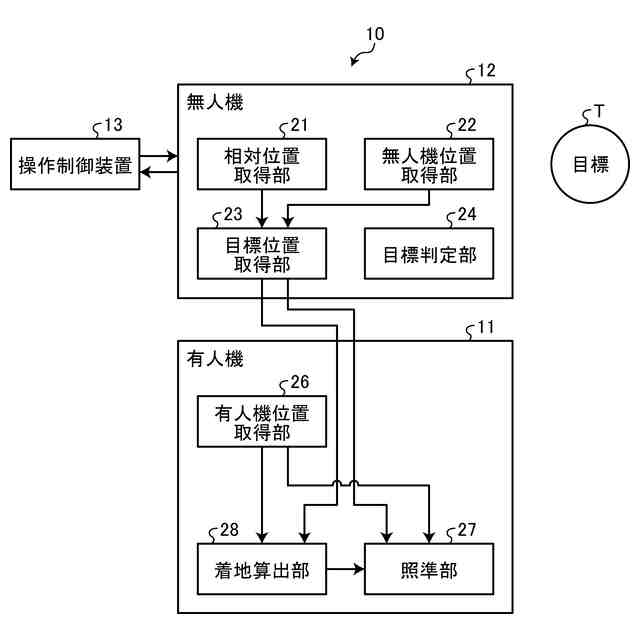
【解決手段】有人航空機と無人航空機とが協働して、目標に対する照準を合わせて、有人航空機から投射物を投射する照準投射システムにおいて、無人航空機と目標との相対位置を取得する相対位置取得部と、無人航空機の絶対座標系における無人航空機位置を取得する無人機位置取得部と、相対位置と無人航空機位置とに基づいて、絶対座標系における目標の目標位置を取得する目標位置取得部と、有人航空機の絶対座標系における有人航空機位置を取得する有人機位置取得部と、目標位置を取得し、有人航空機位置と目標位置とに基づいて、目標に対する照準を合わせる照準部と、目標位置を取得し、有人航空機位置と目標位置とに基づいて、目標に対する投射物の着地予測点を算出する着地算出部と、を備える。
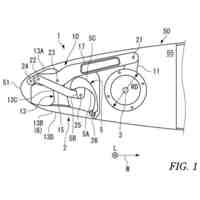
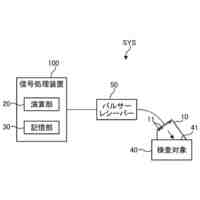
【選択図】図1
特許請求の範囲
【請求項1】
有人航空機と無人航空機とが協働して、目標に対する照準を合わせて、前記有人航空機から投射物を投射する照準投射システムにおいて、
前記無人航空機と前記目標との相対位置を取得する相対位置取得部と、
前記無人航空機の絶対座標系における無人航空機位置を取得する無人機位置取得部と、
前記相対位置と前記無人航空機位置とに基づいて、前記絶対座標系における前記目標の目標位置を取得する目標位置取得部と、
前記有人航空機の絶対座標系における有人航空機位置を取得する有人機位置取得部と、
前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する照準を合わせる照準部と、
前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する前記投射物の着地予測点を算出する着地算出部と、を備える照準投射システム。
続きを表示(約 1,100 文字)
【請求項2】
前記有人航空機は、
前記目標位置と前記着地予測点とを表示する表示部をさらに備え、
前記表示部は、
前記有人航空機位置から前記目標位置までの距離を半径とする球面を2次元の表示領域とし、前記表示領域と前記投射物の投射軌道とが交差する点を、前記着地予測点として表示する請求項1に記載の照準投射システム。
【請求項3】
前記投射物は、複数の種類の異なる前記投射物が用意され、
前記有人航空機は、
前記目標位置と前記着地予測点とを表示する表示部をさらに備え、
前記表示部は、
前記投射物の種類が選択され、前記着地算出部により前記着地予測点が算出された後、前記目標位置と共に前記着地予測点を表示する請求項1に記載の照準投射システム。
【請求項4】
前記投射物は、複数の種類の異なる前記投射物が用意され、
前記有人航空機は、
前記目標位置と前記着地予測点とを表示する表示部をさらに備え、
前記表示部は、
前記投射物の種類が選択される前に、前記目標位置を表示する請求項1に記載の照準投射システム。
【請求項5】
前記表示部は、
前記投射物の種類が選択され、前記着地算出部により前記着地予測点が算出された後、前記目標位置と共に前記着地予測点を表示する請求項4に記載の照準投射システム。
【請求項6】
前記目標位置取得部は、前記目標位置を取得すると、前記目標位置の位置情報を前記照準部及び前記着地算出部へ出力する請求項1に記載の照準投射システム。
【請求項7】
有人航空機と無人航空機とが協働して、目標に対する照準を合わせて、前記有人航空機から投射物を投射する照準投射システムが実行する照準投射方法であって、
前記照準投射システムが、
前記無人航空機と前記目標との相対位置を取得するステップと、
前記無人航空機の絶対座標系における無人航空機位置を取得するステップと、
前記相対位置と前記無人航空機位置とに基づいて、前記絶対座標系における前記目標の目標位置を取得するステップと、
前記有人航空機の絶対座標系における有人航空機位置を取得するステップと、
前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する照準を合わせるステップと、
前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する前記投射物の着地予測点を算出するステップと、を実行する照準投射方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、照準投射システム及び照準投射方法に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、目標へ投射する投射物に関する情報、提供される位置データ及び地図データベースに基づいて、投射物の着地予測点を特定する無人航空機を用いた照準システムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特表2016-540949号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の照準システムでは、地図データベースに基づいて目標の目標位置を特定し、特定した目標位置の周辺の環境状態を画像により把握すると共に、画像データと投射物に関する情報に基づいて、着地予測点を特定している。しかしながら、目標位置は、地図データベースに基づくことから、地図データベース上の目標位置と、現実空間上の目標位置との位置に誤差がある場合、目標位置を精度よく捕捉することが困難となる。
【0005】
そこで、本開示は、目標位置を好適に捕捉し、照準精度を向上させ、投射物の着地予測点への投射を精度よく行うことができる照準投射システム及び照準投射方法を提供することを課題とする。
【課題を解決するための手段】
【0006】
本開示の照準投射システムは、有人航空機と無人航空機とが協働して、目標に対する照準を合わせて、前記有人航空機から投射物を投射する照準投射システムにおいて、前記無人航空機と前記目標との相対位置を取得する相対位置取得部と、前記無人航空機の絶対座標系における無人航空機位置を取得する無人機位置取得部と、前記相対位置と前記無人航空機位置とに基づいて、前記絶対座標系における前記目標の目標位置を取得する目標位置取得部と、前記有人航空機の絶対座標系における有人航空機位置を取得する有人機位置取得部と、前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する照準を合わせる照準部と、前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する前記投射物の着地予測点を算出する着地算出部と、を備える。
【0007】
本開示の照準投射方法は、有人航空機と無人航空機とが協働して、目標に対する照準を合わせて、前記有人航空機から投射物を投射する照準投射システムが実行する照準投射方法であって、前記照準投射システムが、前記無人航空機と前記目標との相対位置を取得するステップと、前記無人航空機の絶対座標系における無人航空機位置を取得するステップと、前記相対位置と前記無人航空機位置とに基づいて、前記絶対座標系における前記目標の目標位置を取得するステップと、前記有人航空機の絶対座標系における有人航空機位置を取得するステップと、前記無人航空機から前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する照準を合わせるステップと、前記無人航空機から前記目標位置を取得し、前記有人航空機位置と前記目標位置とに基づいて、前記目標に対する前記投射物の着地予測点を算出するステップと、を実行する。
【発明の効果】
【0008】
本開示によれば、目標位置を好適に捕捉し、照準精度を向上させ、投射物の着地予測点への投射を精度よく行うことができる。
【図面の簡単な説明】
【0009】
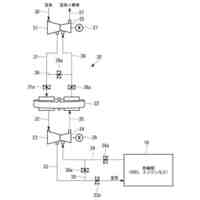
図1は、第一実施形態に係る照準投射システムに関する図である。
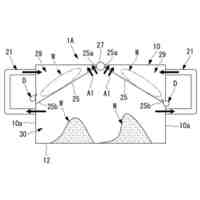
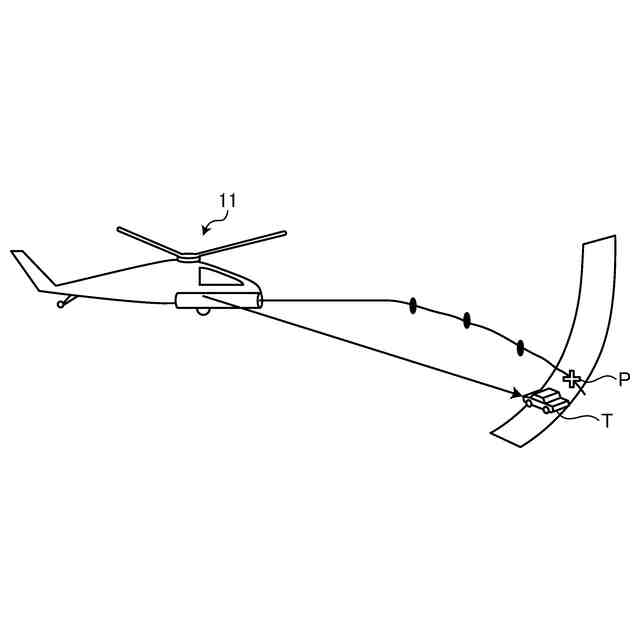
図2は、第一実施形態に係る照準投射システムの表示に関する説明図である。
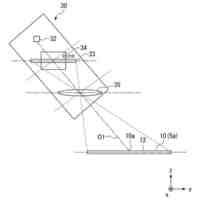
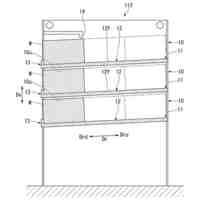
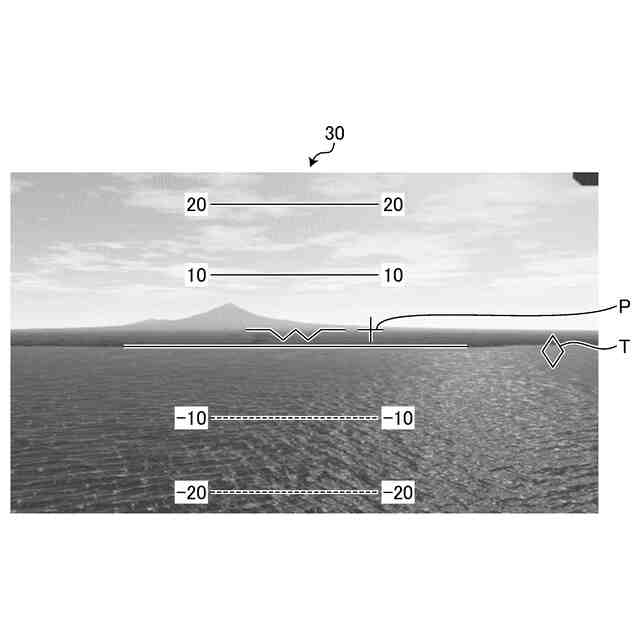
図3は、第一実施形態に係る照準投射システムの表示部に関する図である。
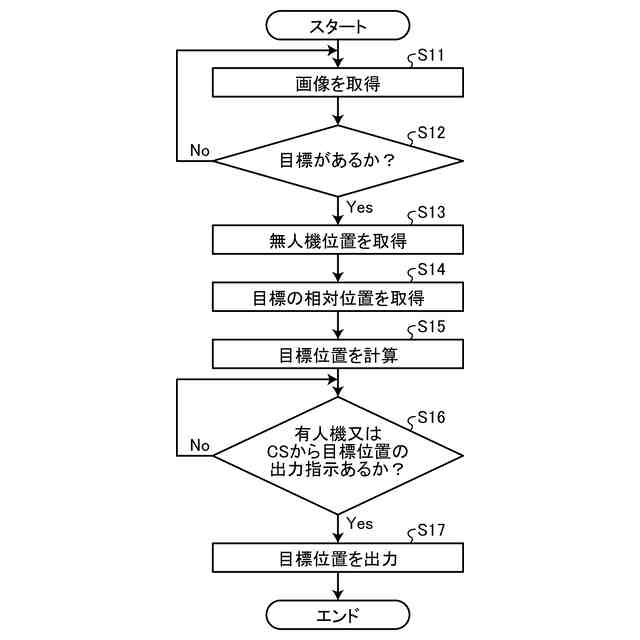
図4は、第一実施形態に係る照準投射システムの無人航空機の制御に関するフローチャートである。
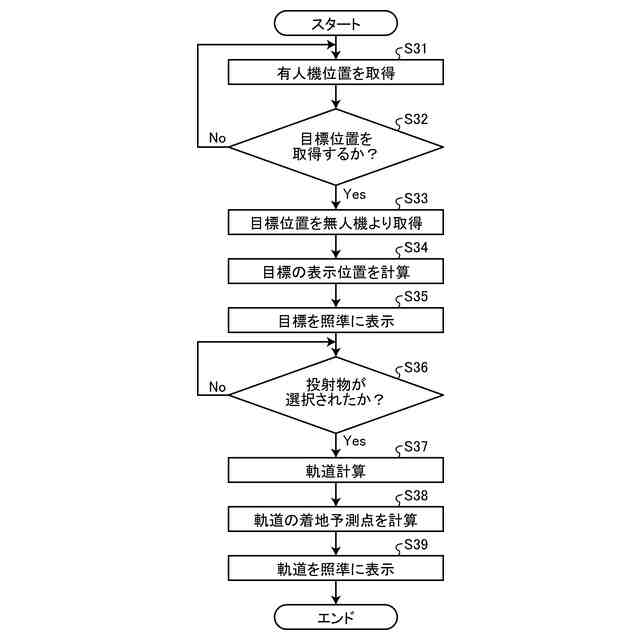
図5は、第一実施形態に係る照準投射システムの有人航空機の制御に関するフローチャートである。
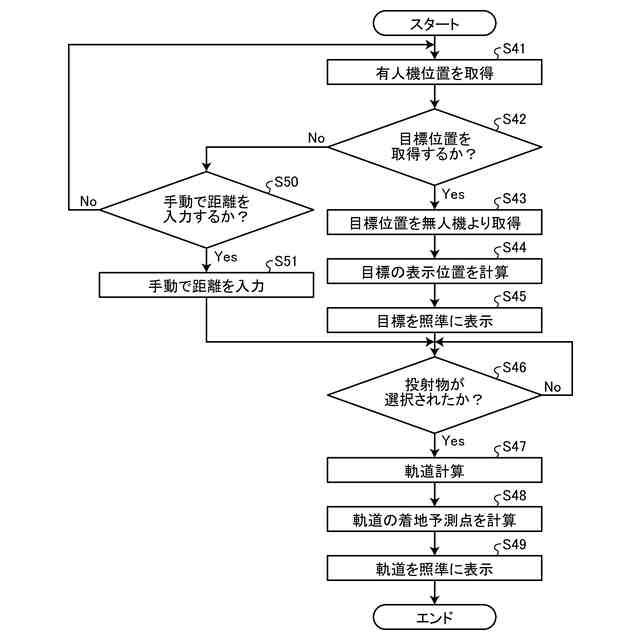
図6は、第二実施形態に係る照準投射システムの有人航空機の制御に関するフローチャートである。
図7は、第三実施形態に係る照準投射システムの有人航空機の制御に関するフローチャートである。
【発明を実施するための形態】
【0010】
以下に、本開示に係る実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの開示が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、あるいは実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能であり、また、実施形態が複数ある場合には、各実施形態を組み合わせることも可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
炭化炉
10日前
三菱重工業株式会社
炉設備
18日前
三菱重工業株式会社
貯留システム
11日前
三菱重工業株式会社
リチウム脱離装置
27日前
三菱重工業株式会社
冷却装置及び冷却方法
25日前
三菱重工業株式会社
対向ピストンエンジン
6日前
三菱重工業株式会社
鋳造方法および鋳造品
今日
三菱重工業株式会社
高揚力装置および航空機
7日前
三菱重工業株式会社
炭化炉及びその制御方法
25日前
三菱重工業株式会社
燃焼器及びガスタービン
27日前
三菱重工業株式会社
電解セル、及び電解装置
6日前
三菱重工業株式会社
晶析システム及び晶析方法
18日前
三菱重工業株式会社
動翼、及び動翼の加工方法
27日前
三菱重工業株式会社
圧縮機及び圧縮機システム
28日前
三菱重工業株式会社
計測装置、及び積層造形装置
7日前
三菱重工業株式会社
電力変換器及び電力システム
1か月前
三菱重工業株式会社
軸封組品、及び蒸気タービン
13日前
三菱重工業株式会社
電動機、及び電動機の製造方法
25日前
三菱重工業株式会社
信号処理装置及び信号処理方法
25日前
三菱重工業株式会社
回転電機用回転子及び回転電機
25日前
三菱重工業株式会社
ストッカ、及び細胞培養システム
25日前
三菱重工業株式会社
蓄熱空調システムおよび制御方法
6日前
三菱重工業株式会社
ストッカ、及び細胞培養システム
27日前
三菱重工業株式会社
殺菌用ユニット、細胞培養システム
26日前
三菱重工業株式会社
容器搬送治具及び細胞培養システム
27日前
三菱重工業株式会社
計算方法、解析装置及びプログラム
今日
三菱重工業株式会社
水素製造プラント及び水素製造方法
4日前
三菱重工業株式会社
液浸冷却システム及びその制御方法
5日前
三菱重工業株式会社
電力伝送装置および電力伝送システム
25日前
三菱重工業株式会社
配管内部の付着物除去装置および方法
3日前
三菱重工業株式会社
計算方法、炉心解析装置及びプログラム
27日前
三菱重工業株式会社
管理装置、管理方法、およびプログラム
27日前
三菱重工業株式会社
ガス供給装置及びガス供給装置の起動方法
25日前
三菱重工業株式会社
保管ユニット、保管装置、細胞培養システム
1か月前
三菱重工業株式会社
管理装置、管理システム、およびプログラム
27日前
三菱重工業株式会社
計画システム、計画方法、およびプログラム
27日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ