TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084244
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023197992
出願日
2023-11-22
発明の名称
撮影システム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
B25J
13/08 20060101AFI20250527BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多関節ロボットを用いたワークの外観検査において、ワークの品種の違いによる設備改修の負担を削減する。
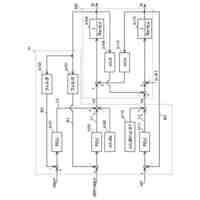
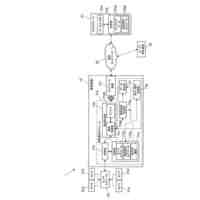
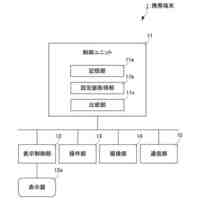
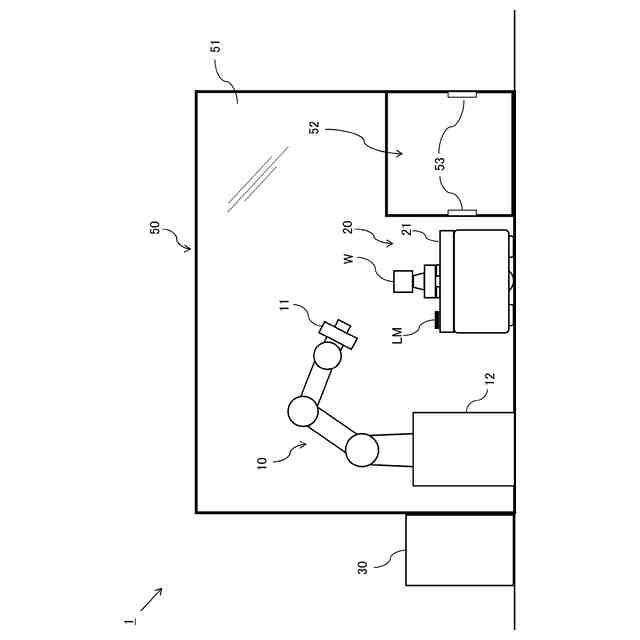
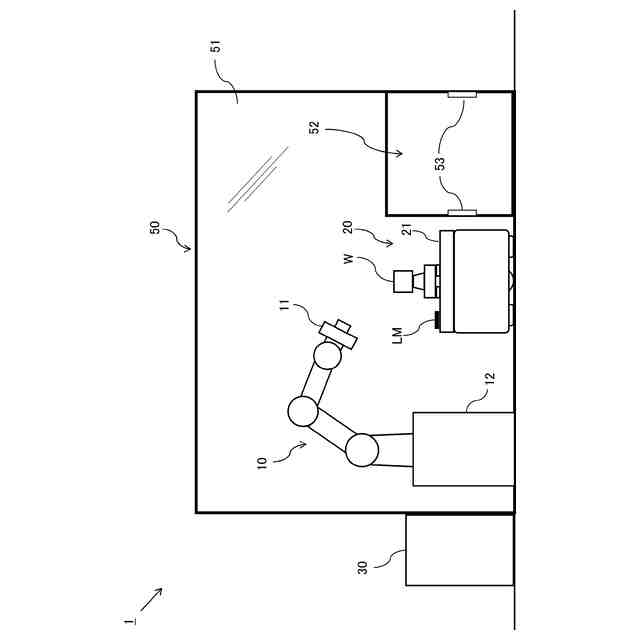
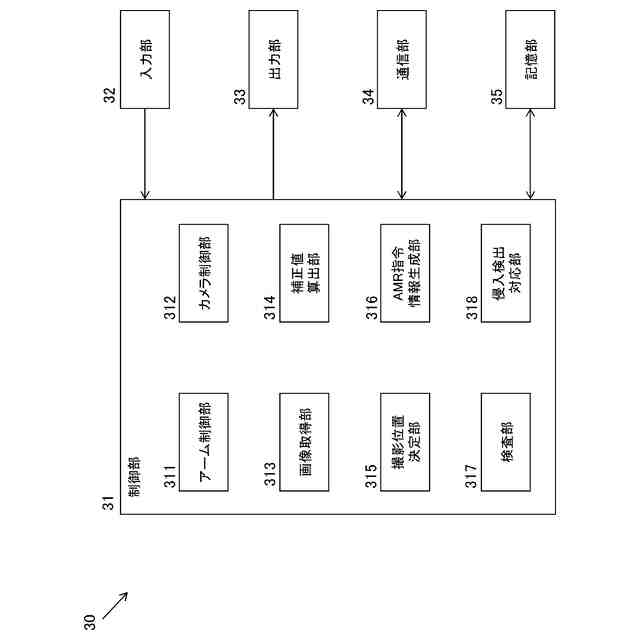
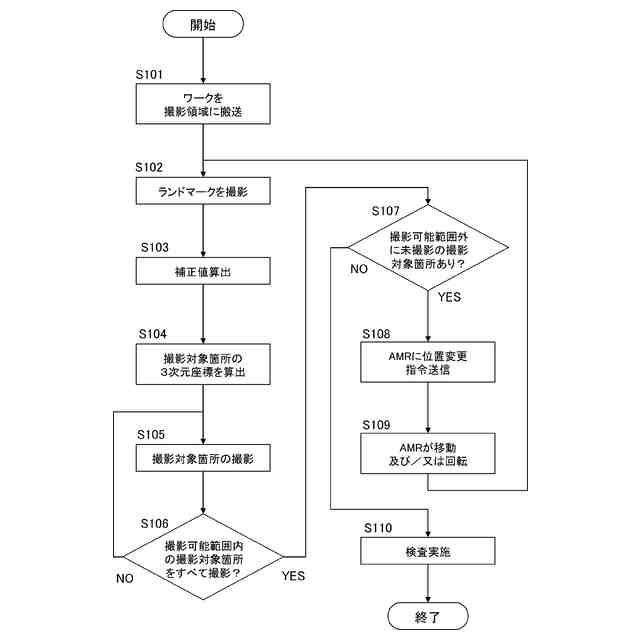
【解決手段】撮影対象物を撮影する撮影手段を備える多関節ロボットと、撮影対象物を載置する載置面を備える自律走行ロボットと、撮影対象物又は自律走行ロボットに配置される標識と、自律走行ロボットが多関節ロボットから所定範囲内に設定される撮影領域に撮影対象物を搬送した場合に、自律走行ロボットに載置された状態の撮影対象物の少なくとも一つ以上の撮影対象箇所を撮影するように多関節ロボットを制御する制御手段と、を有しており、制御手段は、撮影手段によって標識を撮影することで撮影対象物の位置及び姿勢に係る補正値を求め、該補正値を用いて撮影対象箇所の位置及び向きを算出するように構成される撮影システム。
【選択図】図1
特許請求の範囲
【請求項1】
撮影対象物を撮影する撮影手段を備える多関節ロボットと、
前記撮影対象物を載置する載置面を備える自律走行ロボットと、
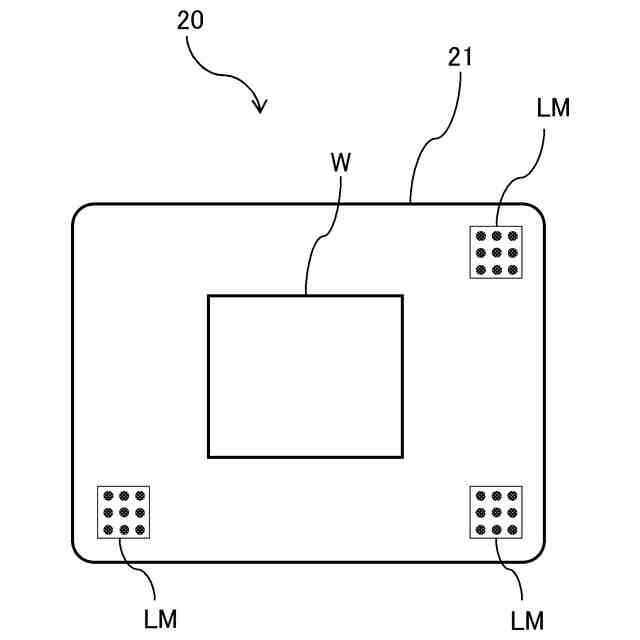
前記撮影対象物又は前記自律走行ロボットに配置される標識と、
前記自律走行ロボットが前記多関節ロボットから所定範囲内に設定される撮影領域に前記撮影対象物を搬送した場合に、前記自律走行ロボットに載置された状態の前記撮影対象物の少なくとも一つ以上の撮影対象箇所を撮影するように前記多関節ロボットを制御する制御手段と、
を有しており、
前記制御手段は、前記撮影手段によって前記標識を撮影することで前記撮影対象物の位置及び姿勢に係る補正値を求め、該補正値を用いて前記撮影対象箇所の位置及び向きを算出するように構成される、
撮影システム。
続きを表示(約 640 文字)
【請求項2】
前記撮影対象箇所の位置が前記多関節ロボットの可動域との関係において所定の条件を満たす場合には、前記自律走行ロボットが移動又は回転の少なくともいずれかを行うことにより前記撮影対象箇所を前記所定の条件を満たさない位置に移動させる、
請求項1に記載の撮影システム。
【請求項3】
前記所定の条件は、前記撮影手段による撮影が可能な範囲の外に前記撮影対象箇所が位置していることである
請求項2に記載の撮影システム。
【請求項4】
前記撮影手段による撮影が可能な範囲内に位置する前記撮影対象箇所がある場合には、すべての前記範囲内に位置する前記撮影対象箇所の撮影を終えた後に、前記制御手段が前記自律走行ロボットに移動又は回転の少なくともいずれかを行うべき旨の情報を送信する、
請求項3に記載の撮影システム。
【請求項5】
前記多関節ロボットは隔壁によって区切られた区域内に配置されており、
前記隔壁には前記自律走行ロボットが出入りする通行口が設けられるとともに、前記区域内への前記自律走行ロボット以外の移動体の侵入を検知する侵入検知手段を有する、
請求項1に記載の撮影システム。
【請求項6】
前記撮影手段によって撮影された前記撮影対象箇所の画像に基づいて、前記撮影対象物の検査を実施する検査手段を有する、
請求項1から5のいずれか一項に記載の撮影システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮影システム及び撮影システムを用いた外観検査システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
複数の検査対象箇所を有する物品(以下、ワークともいう)の外観検査を行う手法として、カメラを取り付けた多関節ロボットアームを制御することで、ロボットアームの先端に取り付けられたカメラの位置を適宜変更しながら、検査対象物の複数の部位を撮像することが公知となっている(例えば特許文献1)。
【0003】
従来、このような多関節ロボットによる(複数箇所の)外観検査では、検査位置へのワークの配置には、検査台と運搬装置とのワークの受け渡しや、ロボットに対するワークの位置決めなどに、ワークの品種に応じた専用機構を用いていため、品種の変更によりワークの形状やサイズが変わった場合、専用機構部分の改造を行う必要がある。
【0004】
また、品種によってワークの形状やサイズが異なるため、多関節ロボットの可動域の限界から、品種変更を行った場合に所望の作業を実施することが困難となる場合も多く、その場合、カメラが撮影可能な範囲に到達できない検査面(検査箇所)をなくすために、ワーク姿勢を変更するためのターンテーブルを追加したり、多関節ロボット自体のサイズを大きくするなどして対応する必要がある。
【0005】
近年は多品種小ロット生産の需要が高まっており、品種変更に対応しやすい設備づくりといった観点からも、上記のようにワークの品種の違いに応じた専用の設備を設けたり、ワークサイズの違いに対応するためにロボットを大型化したりする必要があることは、望ましくない。
【先行技術文献】
【特許文献】
【0006】
特開2023-44764号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は上記実情に鑑みてなされたものであり、多関節ロボットを用いたワークの外観検査において、ワークの品種の違いによる設備改修の負担を削減することを目的とする。
【課題を解決するための手段】
【0008】
前記の目的を達成するために、本発明は以下の構成を採用する。即ち、
撮影対象物を撮影する撮影手段を備える多関節ロボットと、
前記撮影対象物を載置する載置面を備える自律走行ロボットと、
前記撮影対象物又は前記自律走行ロボットに配置される標識と、
前記自律走行ロボットが前記多関節ロボットから所定範囲内に設定される撮影領域に前記撮影対象物を搬送した場合に、前記自律走行ロボットに載置された状態の前記撮影対象物の少なくとも一つ以上の撮影対象箇所を撮影するように前記多関節ロボットを制御する制御手段と、
を有しており、
前記制御手段は、前記撮影手段によって前記標識を撮影することで前記撮影対象物の位置及び姿勢に係る補正値を求め、該補正値を用いて前記撮影対象箇所の位置及び向きを算出する、
撮影システム、である。
【0009】
上記構成のようなシステムによれば、多関節ロボットと撮影対象物(以下、ワークともいう)との位置関係が予めティーチングした通りに厳密なものではなくても、標識を撮像して得られる補正値によりティーチングした位置との位置ずれを補正することで、ワークの撮影対象箇所の3次元座標を適切に求めることが可能となる。これにより、ワーク搬送のための自律走行ロボット上にワークを載せたまま多関節ロボットによる多点検査を行うことができるため、受け渡しや位置決めのための専用機構を用意する必要がなく設備改修のコストを削減することができる。
【0010】
また、前記撮影システムは、前記撮影対象箇所の位置が前記多関節ロボットの可動域との関係において所定の条件を満たす場合には、前記自律走行ロボットが移動又は回転の少なくともいずれかを行うことにより前記撮影対象箇所を前記所定の条件を満たさない位置に移動させるのであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
ドライバ
18日前
オムロン株式会社
電磁継電器
20日前
オムロン株式会社
スイッチ装置
17日前
オムロン株式会社
シート検査装置
18日前
オムロン株式会社
スイッチング装置
2日前
オムロン株式会社
情報処理システム
4日前
オムロン株式会社
処理方法、及び処理装置
18日前
オムロン株式会社
充電システム及びモジュール
17日前
オムロン株式会社
通信装置、通信方法、通信プログラム
2日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
18日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
17日前
オムロン株式会社
アンテナ設定方法及びそれを用いた測位システム
4日前
オムロン株式会社
検査管理システム、検査管理装置、教師データ生成方法、及びプログラム
24日前
オムロン株式会社
設定確認端末、駅務機器、および設定確認方法
12日前
オムロン株式会社
誤操作検出装置、誤操作抑制装置、誤操作検出方法、誤操作抑制方法および誤操作検出プログラム、誤操作抑制プログラム
2日前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
20日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
搬送装置
24日前
住友重機械工業株式会社
教示装置
17日前
個人
ペグハンマおよびペグハンマ用部品
24日前
東京都公立大学法人
対象物把持装置
2か月前
川崎重工業株式会社
ロボット
18日前
工機ホールディングス株式会社
作業機
17日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
学校法人五島育英会
アーム機構
2か月前
工機ホールディングス株式会社
作業機
17日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
24日前
住友重機械工業株式会社
支援装置
24日前
株式会社PILLAR
チューブ保持治具
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ