TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084357
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198201
出願日
2023-11-22
発明の名称
吸着パッド
出願人
株式会社スター精機
代理人
個人
,
個人
主分類
B25J
15/06 20060101AFI20250527BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークの変形を抑制することができる吸着パッドを提供すること。
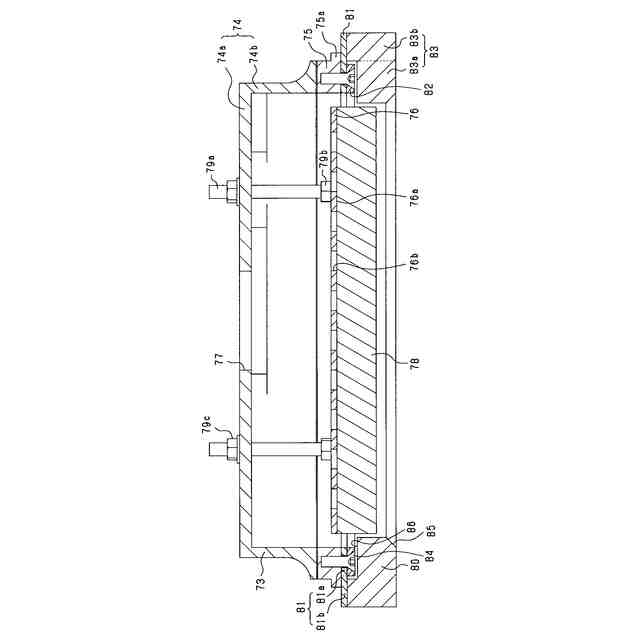
【解決手段】ワークWを吸着する吸着パッドは、エア配管が連結され、エアによって負圧を発生させてワークWを吸着する吸着面76aを有する本体部70と、吸着面76aを囲むように環状に形成されたパッド部80と、パッド部80に比較して通気性が良く、少なくとも吸着面76aに形成された吸引口76bを塞ぐように吸着面76aを覆うカバー部78と、を備えた。
【選択図】 図4
特許請求の範囲
【請求項1】
ワークを吸着した状態で前記ワークを搬送するワーク搬送装置に用いられる吸着パッドであって、
エア配管が連結され、エアによって前記ワークを吸着する吸着面を有する本体部と、
前記吸着面を囲むように環状に形成されたパッド部と、
前記パッド部に比較して通気性が良く、少なくとも前記吸着面に形成された吸引口を塞ぐように前記吸着面を覆うカバー部と、を備えた吸着パッド。
続きを表示(約 1,000 文字)
【請求項2】
前記本体部は、一方の面に前記吸着面が形成された金属プレートを有し、
前記金属プレートには、その板厚方向に貫通する前記吸引口が複数形成されており、
前記カバー部は、前記金属プレートの前記吸着面を覆うようにして前記複数の吸引口を覆うものであり、
前記カバー部は、前記金属プレートよりも柔軟性の高い材料によって形成されている、請求項1に記載の吸着パッド。
【請求項3】
板厚方向において、前記本体部に対する前記金属プレートの位置は、前記パッド部の内側において、調整可能に構成されている、請求項2に記載の吸着パッド。
【請求項4】
前記金属プレートは、締結部品によって前記本体部に固定されるように構成されており、
前記カバー部には、前記締結部品を露出させる貫通孔又は切欠きが設けられている、請求項3に記載の吸着パッド。
【請求項5】
前記カバー部は、多孔質弾性体により形成されている、請求項1~4のうちいずれか1項に記載の吸着パッド。
【請求項6】
前記カバー部の前記ワークに対応する面は平坦面とされている、請求項1~4のうちいずれか1項に記載の吸着パッド。
【請求項7】
前記カバー部は、両面テープにより前記吸着面に対して着脱可能に設けられている、請求項1~4のうちいずれか1項に記載の吸着パッド。
【請求項8】
前記パッド部の内周面と、前記ワークの接触面との間の角部には、テーパ面又は曲面が設けられている、請求項1~4のうちいずれか1項に記載の吸着パッド。
【請求項9】
前記パッド部は、前記ワークに接触する接触部と、前記本体部に取り付けられ、弾性変形可能なクッション部材と、を有し、前記本体部と前記接触部の間に前記クッション部材が介在するように、それらが重ねられて構成されており、
前記クッション部材は、前記吸着面を囲む環状に構成されており、
前記クッション部材の外周部分は、前記本体部に固定されておらず、前記接触部側へ変形可能であり、
前記接触部は、環状に構成されており、前記クッション部材の外周部分に接着されている、請求項1~4のうちいずれか1項に記載の吸着パッド。
【請求項10】
前記接触部の内周部分と、前記本体部又は前記クッション部材との間には、隙間が形成されている、請求項9に記載の吸着パッド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワーク搬送装置の吸着パッドに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
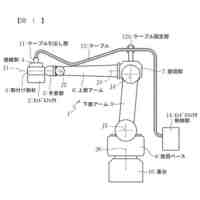
従来から、パレタイジングロボットなどのワーク搬送装置を利用することによって、袋体などのデパレタイジング作業(又はパレタイジング作業、以下同じ)の自動化が実施されている。このようなデパレタイジング作業の自動化に用いるロボットハンドとしては、例えば特許文献1に記載されている吸着パッドが知られている。
【0003】
特許文献1では、吸着パッドをデパレタイジングすべきワークに接触させたのちに、真空吸引力を作用させることにより、ワークを吸着パッドで吸着して吊り上げ、その吊り上げた状態で運んでいる。なお、このような吸着パッドを真空グリッパとも呼ぶ場合がある。
【先行技術文献】
【特許文献】
【0004】
特開平6-80370号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、米や穀物などを収容した袋体などのワークは、重量が重く、また、特定の実態がなく、変形し易いものである。このため、吸引する際、負圧又はエアの吸込みを大きくする必要があり、ワークの一部が内側に引き込まれていた。このように、負圧又はエアの吸込みを大きくして、吸着パッドの内部にワークが引き込まれると、エアが吸引される吸引口にワークが引き込まれて、ワークが変形する場合や、跡がついてしまう場合があった。
【0006】
本発明は、上記課題に鑑みてなされたものであり、その目的は、ワークの変形を抑制することができる吸着パッドを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するための手段は、ワークを吸着した状態で前記ワークを搬送するワーク搬送装置に用いられる吸着パッドであって、エア配管が連結され、エアによって前記ワークを吸着する吸着面を有する本体部と、前記吸着面を囲むように環状に形成されたパッド部と、前記パッド部に比較して通気性が良く、少なくとも前記吸着面に形成された吸引口を塞ぐように前記吸着面を覆うカバー部と、を備えた。
【0008】
上記手段に示すように、カバー部で吸引口を覆うことにより、ワークが吸引口に引き込まれることを防止し、ワークが変形することを抑制できる。
【図面の簡単な説明】
【0009】
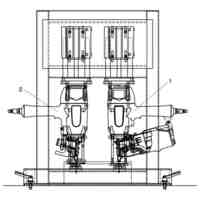
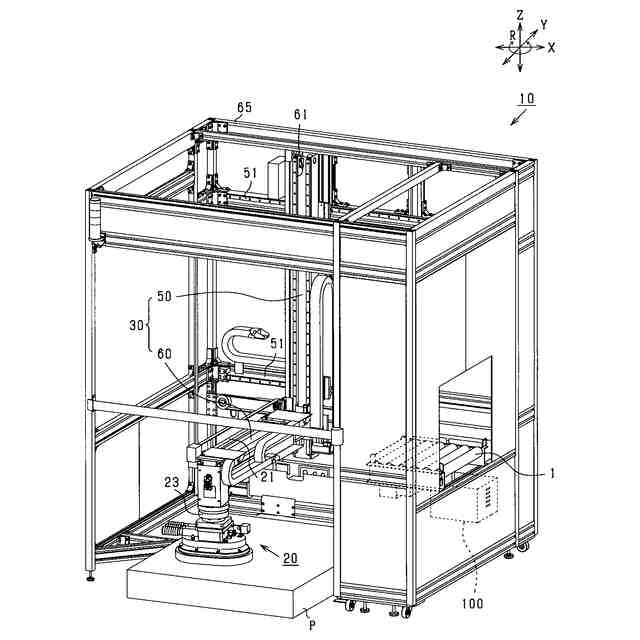
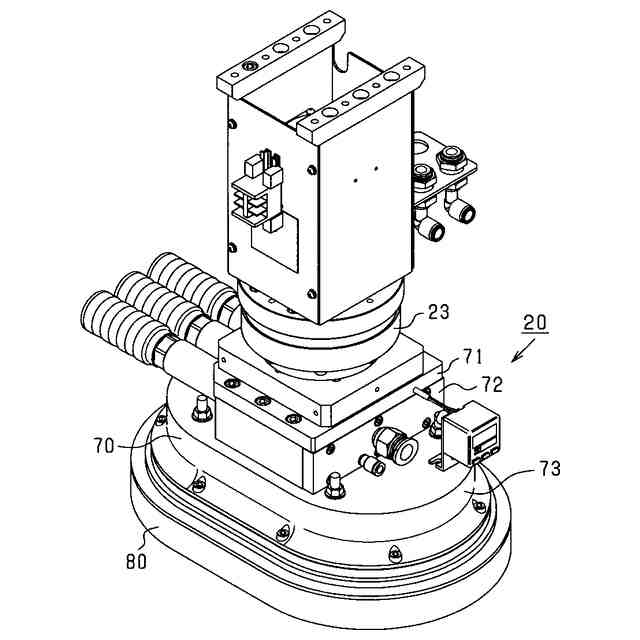
ワーク搬送装置の斜視図。
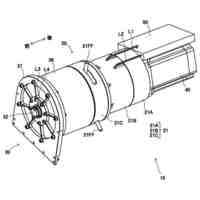
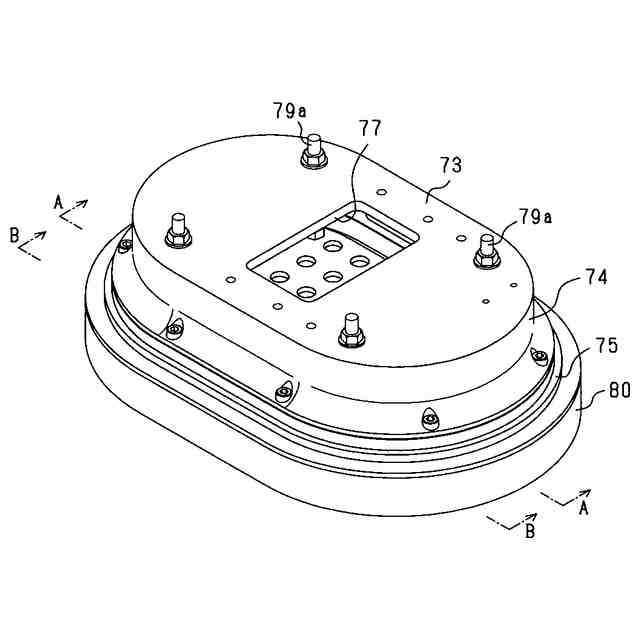
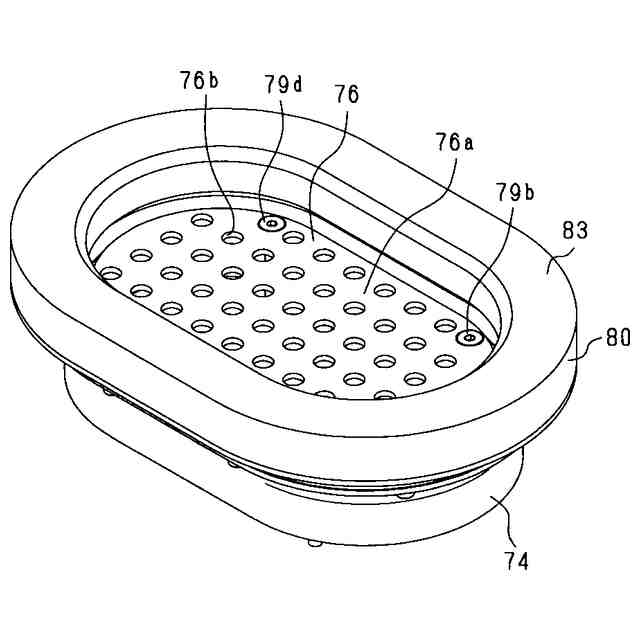
吸着パッドの上方斜視図。
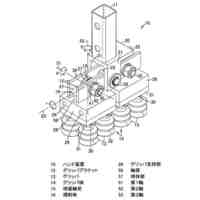
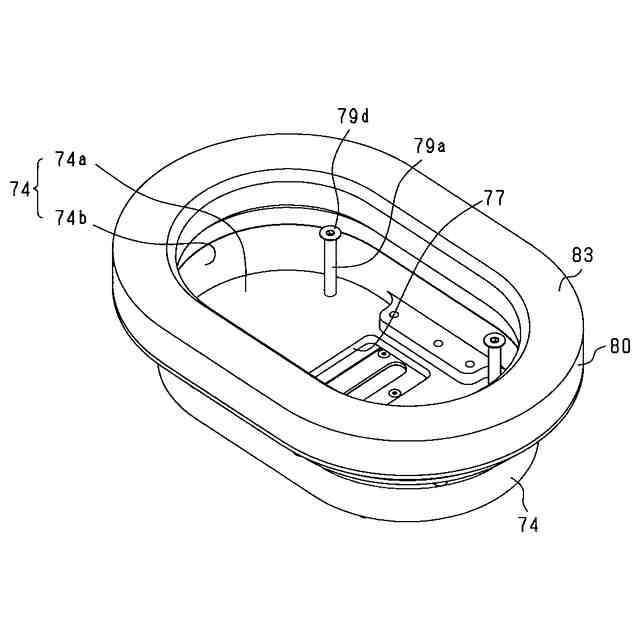
本体フレームとパッド部の斜視図。
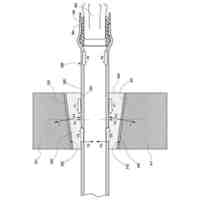
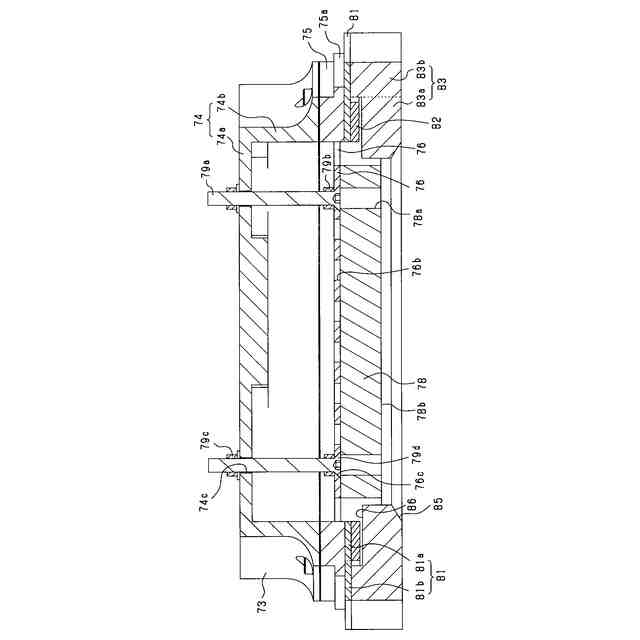
A-A線断面図。
B-B線断面図。
吸着パッドの下方斜視図。
吸着パッドの下方斜視図。
吸着パッドの下方斜視図。
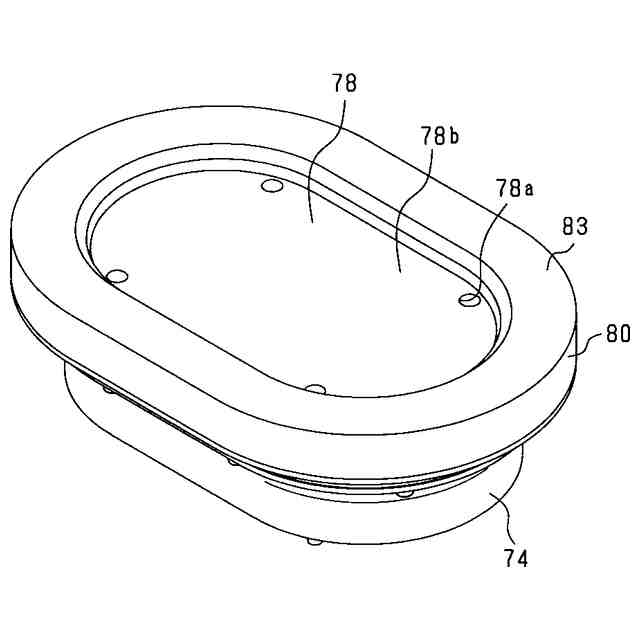
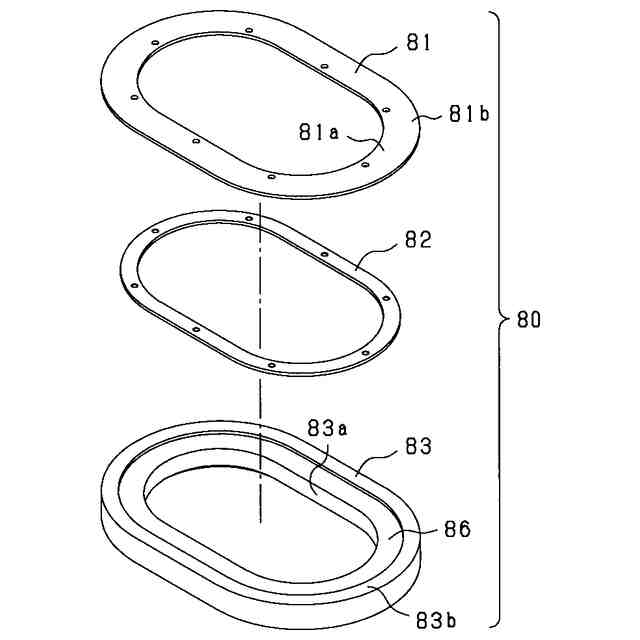
パッド部の分解斜視図。
吸着時におけるパッド部の断面図。
【発明を実施するための形態】
【0010】
以下、本発明にかかる「吸着パッド」を具体化した実施形態について、図面を参照しつつ説明する。なお、以下の実施形態及び変形例において、互いに同一もしくは均等である部分には、図中、同一符号を付しており、同一符号の部分についてはその説明を援用する。また、実施形態及び変形例の説明において、明示している構成の組み合わせだけでなく、特に組み合わせに支障が生じなければ、実施形態及び変形例を組み合わせることも可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社スター精機
産業用ロボット及び産業用ロボットの制御方法
1か月前
株式会社ザイテック
吸着装置
28日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
17日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
搬送装置
21日前
住友重機械工業株式会社
教示装置
14日前
個人
ペグハンマおよびペグハンマ用部品
21日前
川崎重工業株式会社
ロボット
15日前
東京都公立大学法人
対象物把持装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
14日前
工機ホールディングス株式会社
作業機
14日前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
株式会社アイエイアイ
グリッパー
2か月前
株式会社PILLAR
チューブ保持治具
2か月前
庄内機械株式会社
釘打装置
2か月前
住友重機械工業株式会社
支援装置
21日前
住友重機械工業株式会社
支援装置
21日前
オークラ輸送機株式会社
ハンド装置
2か月前
アピュアン株式会社
衝撃工具
23日前
ホシデン株式会社
分解用治具
21日前
株式会社マキタ
電気機器
15日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
1か月前
トヨタ自動車東日本株式会社
搬送治具
2か月前
株式会社リコー
多関節ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
工機ホールディングス株式会社
作業機
17日前
工機ホールディングス株式会社
作業機
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ