TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103945
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221708
出願日
2023-12-27
発明の名称
処理方法、及び処理装置
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G05B
11/36 20060101AFI20250702BHJP(制御;調整)
要約
【課題】補償器の伝達関数が既知とされない場合でも、制御対象自体の周波数特性を算出し、以て、当該制御対象の周波数特性のシミュレーションを可能とする。
【解決手段】制御対象をフィードバック制御するための一又は複数の補償器、及びフィードバック系を含む制御構造体における、経路に関する接続情報を取得し、取得された接続情報に基づいて、制御構造体における、フィードバック系に含まれる一又は複数のフィードバック経路の階層構造と、該階層構造における一又は複数の補償器の接続位置を特定し、制御対象に対して制御構造体を介して所定の入力信号を入力することで得られる該制御対象の応答結果に基づいて、該制御対象の所定のループ周波数特性を取得し、制御対象の所定のループ周波数特性と、制御構造体における階層構造及び一又は複数の補償器の接続位置とに基づいて、制御対象自体の周波数特性を算出する。
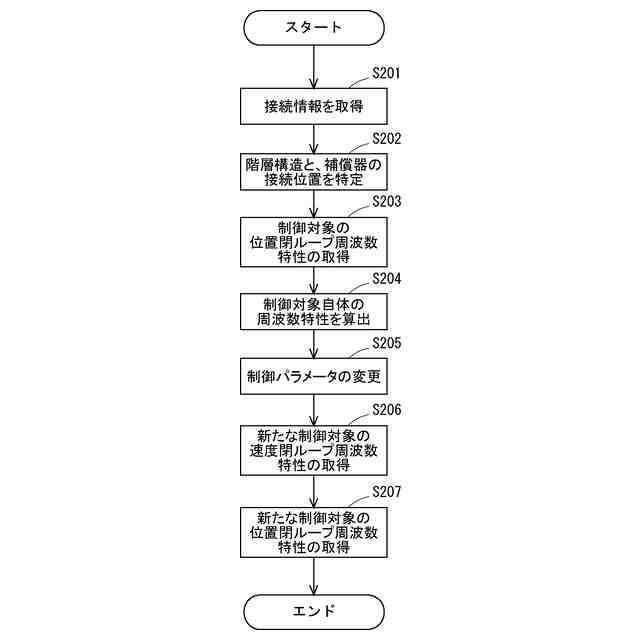
【選択図】図3
特許請求の範囲
【請求項1】
制御対象の周波数特性に関連する処理方法であって、
前記制御対象をフィードバック制御するための一又は複数の補償器、及びフィードバック系を含む制御構造体における、経路に関する接続情報を取得する第1ステップと、
取得された前記接続情報に基づいて、前記制御構造体における、前記フィードバック系に含まれる一又は複数のフィードバック経路の階層構造と、該階層構造における前記一又は複数の補償器の接続位置を特定する第2ステップと、
前記制御対象に対して前記制御構造体を介して所定の入力信号を入力することで得られる該制御対象の応答結果に基づいて、該制御対象の所定のループ周波数特性を取得する第3ステップと、
前記制御対象の前記所定のループ周波数特性と、前記制御構造体における前記階層構造及び前記一又は複数の補償器の接続位置とに基づいて、前記制御対象自体の周波数特性を算出する第4ステップと、
を含む、処理方法。
続きを表示(約 2,300 文字)
【請求項2】
前記第4ステップで、前記階層構造に含まれる前記フィードバック経路のそれぞれにおける、前記一又は複数の補償器の接続位置に基づいて、該フィードバック経路に関連する開ループ周波数特性を算出する調整処理を、前記フィードバック系に含まれる最も外側のフィードバック経路から最も内側のフィードバック経路に至るまで順に繰り返すことで、該最も内側のフィードバック経路に含まれる前記制御対象自体の周波数特性を算出する、
請求項1に記載の処理方法。
【請求項3】
前記制御構造体に、前記制御対象をフィードフォワード制御するためのフィードフォワード系が接続され、
前記第1ステップで、更に、前記フィードフォワード系に関する接続情報を取得し、
前記第2ステップで、更に、前記フィードフォワード系に関する接続情報に基づいて、該フィードフォワード系を、前記制御構造体の所定の前置位置に等価的に変換した前置処理ブロックを、該フィードフォワード系に代えて特定し、
前記第3ステップで、前記制御対象に対して前記制御構造体及び前記フィードフォワード系を介して前記所定の入力信号を入力することで得られる該制御対象の応答結果に基づいて、該制御対象の前記所定のループ周波数特性を取得し、
前記第4ステップで、前記制御構造体における前記階層構造及び前記一又は複数の補償器と前記前置処理ブロックの接続位置とに基づいて、前記制御対象自体の周波数特性を算出する、
請求項1又は請求項2に記載の処理方法。
【請求項4】
前記第2ステップで、前記フィードフォワード系を、該フィードフォワード系が前記制御構造体に接続される一又は複数の接続点のそれぞれにおいて等価的に一又は複数のフィードフォワード小モデルに分解し、該一又は複数のフィードフォワード小モデルと、前記制御構造体における前記階層構造及び前記一又は複数の補償器の接続位置とに基づいて、前記前置処理ブロックを特定する、
請求項3に記載の処理方法。
【請求項5】
前記フィードフォワード系は、前記複数の接続点に含まれる第1接続点、第2接続点、第3接続点のそれぞれにおいて、位置指令に対応する信号、速度指令に対応する信号、トルク指令に対応する信号を提供するように構成され、
前記一又は複数のフィードフォワード小モデルは、前記第1接続点に対応する前記制御対象の位置モデルと、前記第2接続点に対応する該位置モデルから導出される速度モデルと、前記第3接続点に対応する該位置モデルから導出されるトルクモデルとを含む、
請求項4に記載の処理方法。
【請求項6】
前記一又は複数の補償器の周波数特性に関連する制御パラメータを変更する第5ステップと、
前記第4ステップで算出された前記制御対象自体の周波数特性と、前記第5ステップで前記周波数特性が変更された前記一又は複数の補償器と前記フィードバック系を含む前記制御構造体とに基づいて、新たな前記制御対象の閉ループ周波数特性を取得する第6ステップと、
を更に含む、請求項1又は請求項2に記載の処理方法。
【請求項7】
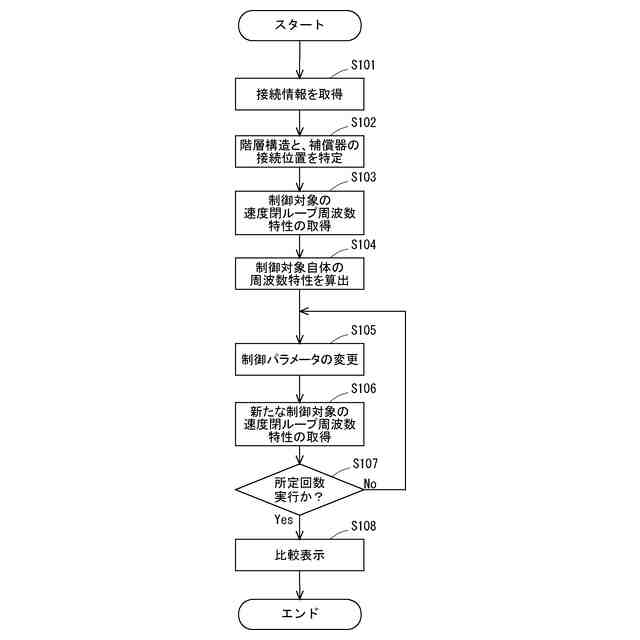
前記第5ステップで、前記制御パラメータを複数回変更し、
前記第6ステップで、前記第5ステップで変更された前記制御パラメータのそれぞれに対応して、前記新たな前記制御対象の閉ループ周波数特性を複数回取得し、
前記処理方法は、
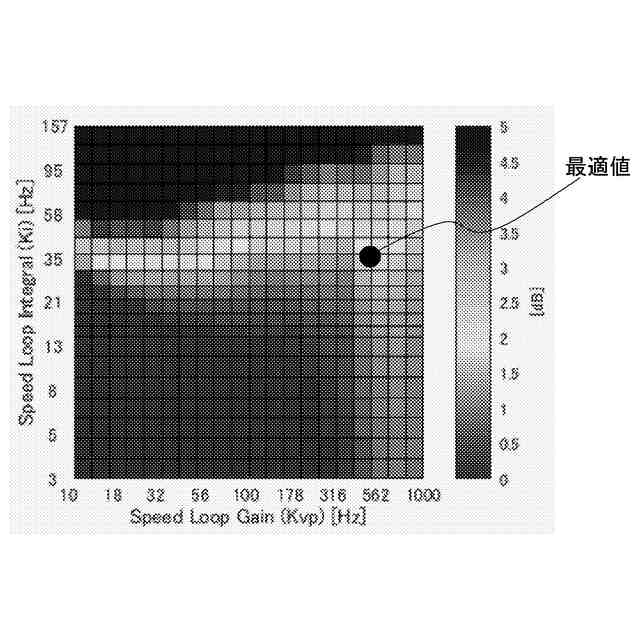
前記複数回の前記制御パラメータと、前記複数回の前記新たな前記制御対象の閉ループ周波数特性に含まれる所定情報とを関連付けて表示する第7ステップを、更に含む、
請求項6に記載の処理方法。
【請求項8】
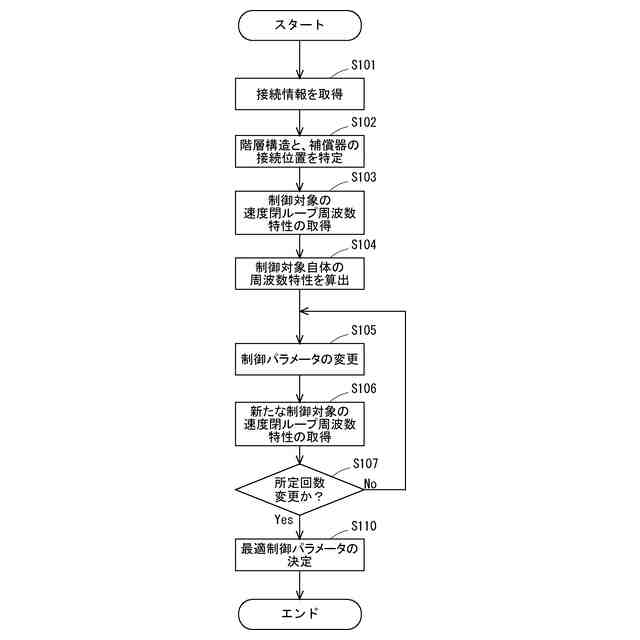
前記第5ステップで、前記制御パラメータを複数回変更し、
前記第6ステップで、前記第5ステップで変更された前記制御パラメータのそれぞれに対応して、前記新たな前記制御対象の閉ループ周波数特性を複数回取得し、
前記処理方法は、
前記複数回の前記制御パラメータと、前記複数回の前記新たな前記制御対象の閉ループ周波数特性に含まれる所定情報とを関連付けた情報に基づいて、前記一又は複数の補償器に設定すべき前記制御パラメータを決定する第8ステップを、更に含む、
請求項6に記載の処理方法。
【請求項9】
前記一又は複数の補償器の周波数特性に関連する制御パラメータを変更する第9ステップと、
前記第4ステップで算出された前記制御対象の周波数特性と、前記第9ステップで前記周波数特性が変更された前記一又は複数の補償器と前記フィードバック系を含む前記制御構造体と、前記フィードフォワード系とに基づいて、新たな前記制御対象の閉ループ周波数特性を取得する第10ステップと、
を更に含む、請求項3に記載の処理方法。
【請求項10】
前記第9ステップで、前記制御パラメータを複数回変更し、
前記第10ステップで、前記第9ステップで変更された前記制御パラメータのそれぞれに対応して、前記新たな前記制御対象の閉ループ周波数特性を複数回取得し、
前記処理方法は、
前記複数回の前記制御パラメータと、前記複数回の前記新たな前記制御対象の閉ループ周波数特性に含まれる所定情報とを関連付けて表示する第11ステップを、更に含む、
請求項9に記載の処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、フィードバック制御の制御対象の周波数特性を算出するための処理方法、及び処理装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
負荷をサーボ制御するサーボ系を構築するために、そのサーボ系の周波数応答の測定が行われる場合がある。一般には、測定された周波数応答を考慮して、サーボ系の速度ループおよび位置ループといった制御ループのゲイン調整が行われる。例えば、特許文献1に示す技術では、制御ループのゲイン等を変化させて、サーボドライバを実際に試験動作させる制御を行い、または仮想モデルを利用したシミュレーションによって試験動作させる制御を行うことで、これらの動作結果に応じて、サーボドライバによる制御の性能指標が算出され、それを参照して制御ループのゲインが決定される。
【0003】
特許文献2では、フィードバック制御の制御対象の周波数応答からインパルス応答を算出し、当該インパルス応答を利用することで複数の制御パラメータによる制御対象の応答シミュレーションを行い、その結果を制御ループのゲイン調整に利用する技術が開示されている。また、特許文献3にも、制御ループのゲイン調整に利用可能な、制御対象の応答シミュレーションに関する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-167607号公報
特開2017-167592号公報
特開2017-167591号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
制御対象をフィードバック制御するように構成される制御構造体を有するドライバにおいて、当該制御対象のフィードバック制御を好適に実現するためには、その制御に適合したゲイン等の制御パラメータを決定する必要がある。そして、制御パラメータを決定するためには、当該制御パラメータを変更して得られる制御対象の周波数特性の変化に関するシミュレーション結果が利用できる。このようなシミュレーションを行うためには、制御対象自体の周波数特性を特定する必要がある。
【0006】
周波数特性のシミュレーションに用いる制御対象の周波数特性は、例えば、制御対象と補償器を含めた閉ループ特性から補償器の周波数特性を除することで求めることはできるが、そのためには、補償器の伝達関数が既知である必要がある。補償器の望ましい周波数特性は、制御対象に応じて設定されており、特に制御対象の高精度のフィードバック制御を行う場合には、ユーザが、補償器の伝達関数(制御アルゴリズム)をカスタマイズする場合がある。このような場合には、周波数特性のシミュレーションのために補償器の伝達関数の具体的な内容を把握することは困難であり、そのため好適な制御パラメータの決定が阻害されるおそれがある。
【0007】
本願開示は、このような問題に鑑みてなされたものであり、補償器の伝達関数が既知とされない場合でも、制御対象自体の周波数特性を算出し、以て、当該制御対象の周波数特性のシミュレーションを可能とする技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願開示においては、上記課題を解決するために、制御対象に対して制御構造体を介して所定の入力信号を入力することで得られる該制御対象の所定のループ周波数特性と、制御構造体における階層構造及び補償器の接続位置とに基づいて、制御対象自体の周波数特性を算出する構成を採用した。これにより、補償器の伝達関数が直接把握できない場合でも制御対象自体の周波数特性の算出が可能となる。
【0009】
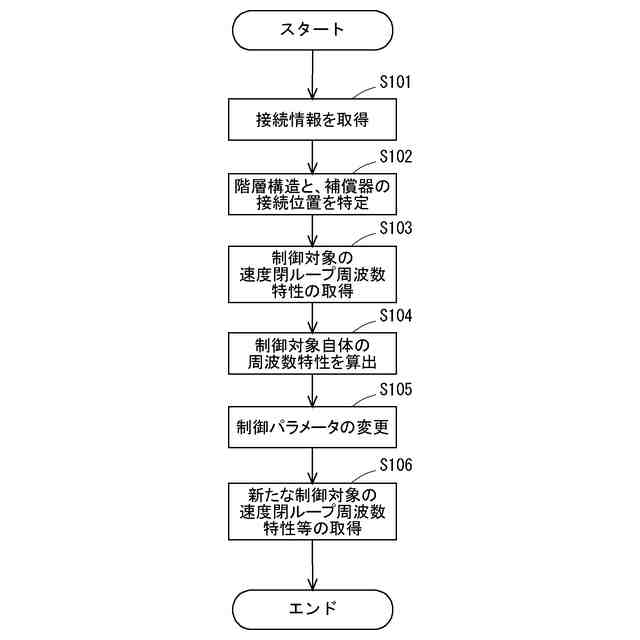
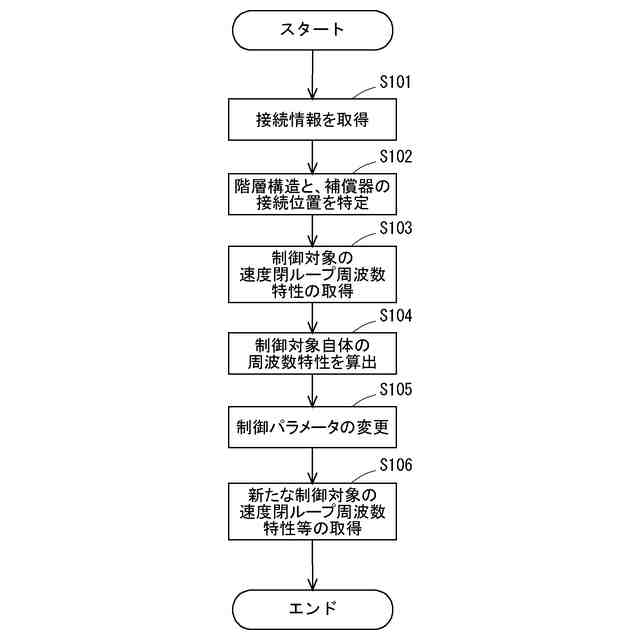
具体的に、本願開示は、制御対象の周波数特性に関連する処理方法であって、前記制御対象をフィードバック制御するための一又は複数の補償器、及びフィードバック系を含む制御構造体における、経路に関する接続情報を取得する第1ステップと、取得された前記接続情報に基づいて、前記制御構造体における、前記フィードバック系に含まれる一又は複数のフィードバック経路の階層構造と、該階層構造における前記一又は複数の補償器の接続位置を特定する第2ステップと、前記制御対象に対して前記制御構造体を介して所定の入力信号を入力することで得られる該制御対象の応答結果に基づいて、該制御対象の所定のループ周波数特性を取得する第3ステップと、前記制御対象の前記所定のループ周波数特性と、前記制御構造体における前記階層構造及び前記一又は複数の補償器の接続位置とに基づいて、前記制御対象自体の周波数特性を算出する第4ステップと、を含む。
【0010】
制御対象のフィードバック制御においては、当該フィードバック制御を司る制御構造体がどのように構成されているか、すなわち、制御構造体における前向き経路やフィードバック経路等の経路がどのように形成されているかについて把握することが重要となる。そこで、第1ステップでは、制御構造体における経路に関する接続情報が取得される。そして、一般的に、フィードバック制御に関する制御構造体では、制御対象のフィードバック制御の目的に応じて、フィードバック系に含まれるフィードバック経路が階層的に構築されている。その上で、各階層のフィードバック経路上に必要な補償器が配置される。そこで、第2ステップでは、当該接続情報から、フィードバック経路の階層構造と、階層構造のそれぞれにおける補償器の接続位置が特定される。これらを特定することで、制御構造体における補償器の働き(作用)を把握することが可能となる。すなわち、フィードバック経路の階層構造と、各階層構造における補償器の接続位置に関する情報は、制御対象のフィードバック制御において有用な情報である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る




 特許ウォッチ
特許ウォッチ