TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090001
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2024167897
出願日
2024-09-26
発明の名称
ロボットシステム、ロボットシステムの制御方法、物品の製造方法、プログラム、及び記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
13/08 20060101AFI20250609BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者の負担を軽減するロボットシステムを提供すること。
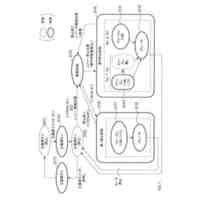
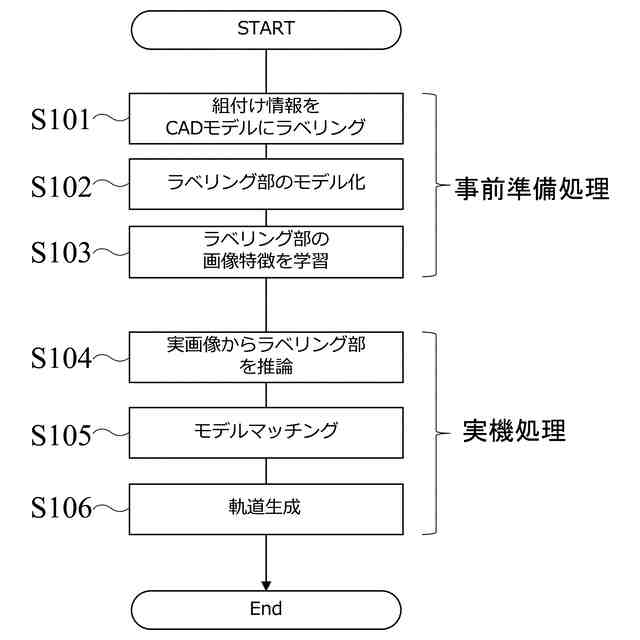
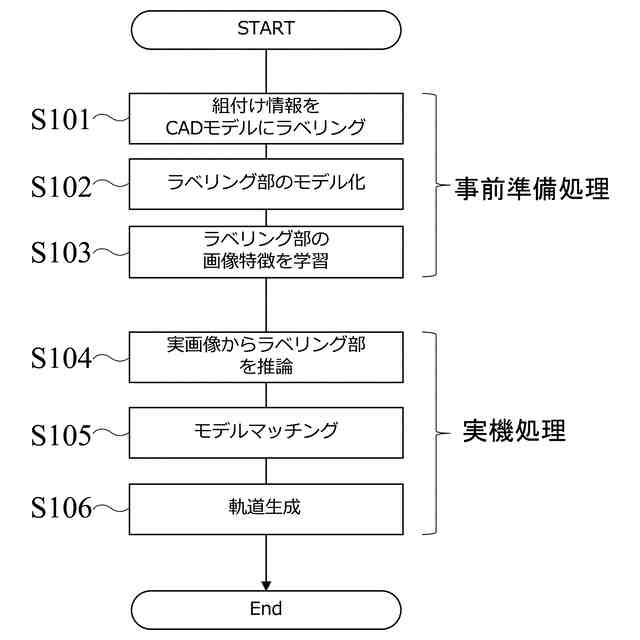
【解決手段】ロボットシステムは、ロボットと、ワークにおける作業を行う作業領域を探査し、作業領域の情報を含む探査データを取得する探査部と、作業領域に関する情報と、作業領域に関連付けられ、前記ワークに実行する作業に関する情報と、探査データと、に基づき、作業領域を特定する(S104~S105)と共に特定した作業領域に作業を行う(S106)ように前記ロボットを制御する制御部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
ロボットと、
ワークにおける作業を行う作業領域を探査し、前記作業領域の情報を含む探査データを取得する探査部と、
前記作業領域に関する情報と、前記作業領域に関連付けられ、前記ワークに実行する作業に関する情報と、前記探査データと、に基づき、前記作業領域を特定すると共に特定した前記作業領域に作業を行うように前記ロボットを制御する制御部と、を備える、
ことを特徴とするロボットシステム。
続きを表示(約 1,300 文字)
【請求項2】
前記作業領域に関する情報は、ワークを設計したときの設計情報から前記作業領域をモデル化することで取得されるモデルである、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
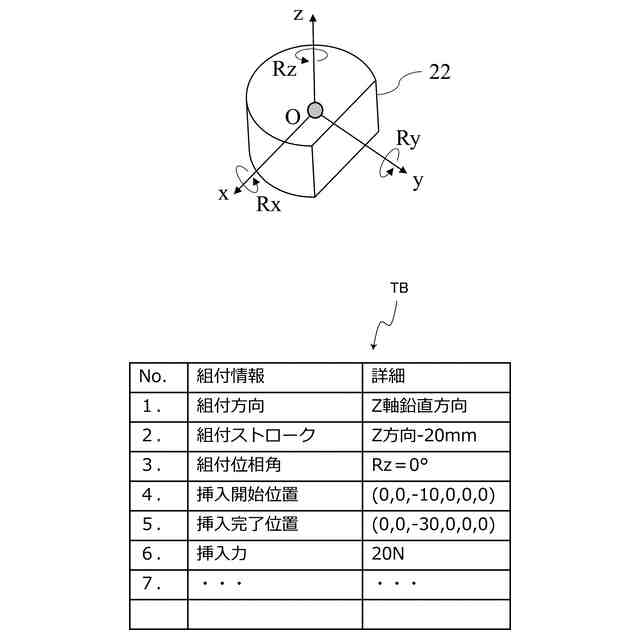
前記作業に関する情報は、部品の組付け方向、部品の組付けストローク量、部品の組付け位相角、部品の挿入開始位置、部品の挿入完了位置、部品の挿入力、の少なくとも1つを含む、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項4】
前記作業に関する情報は、テーブル情報として設定されている、
ことを特徴とする請求項3に記載のロボットシステム。
【請求項5】
請求項探査データは、カメラ、触覚センサ、超音波センサ、プローブの少なくとも1つから得られるデータである、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項6】
前記モデルには、前記モデルの位置姿勢を示す座標系が設定されており、
前記モデルと、前記探査データに基づき取得された前記作業領域に関する情報と、に基づき、前記モデルの座標系によって規定される、前記ワークの前記作業領域の位置姿勢に関する情報を取得し、
前記位置姿勢に関する情報に基づき、前記ワークの前記作業領域に前記ロボットにより作業を実行する、
ことを特徴とする請求項2に記載のロボットシステム。
【請求項7】
前記ロボットは力に関する情報を取得するセンサを備えており、
前記位置姿勢に関する情報と、前記ロボットにかかる力に関する情報と、に基づき、前記ワークの前記作業領域に前記ロボットにより作業を実行する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項8】
前記探査部は、前記ロボットに設けられた撮像装置を備えており、
前記位置姿勢に関する情報と、前記撮像装置の基準位置と、前記ロボットが移動させる部品の基準位置と、に基づき、前記ワークの前記作業領域に前記ロボットにより作業を実行する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項9】
前記探査部は撮像装置を備えており、
前記位置姿勢に関する情報と、前記作業に関する情報と、前記ロボットの所定部位における座標系と、撮像装置における座標系と、前記ロボットの座標系と、に基づき、前記ワークに対する作業を実行するための前記ロボットの軌道を取得する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項10】
前記探査部は、前記作業領域に探査方向を向けて探査することで前記探査データを取得し、
前記モデルを複数の角度から探査した場合における前記作業領域の特徴を学習して取得した学習モデル情報を取得し、
前記制御部は、前記学習モデル情報と前記探査データとに基づき前記作業領域を特定する、
ことを特徴とする請求項2に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、ロボットシステムの制御方法、物品の製造方法、プログラム、及び記録媒体に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば工場等に設置される産業用ロボット等のロボット装置においては、ワークに対し、部品の組付けや貼付け、接着剤や塗料の塗布、ツールを用いた加工、等の作業を行うものがある。このような作業は、例えばカメラを用いてワークにおける作業を行う部位を画像認識し、認識した部位に対してロボットの位置や姿勢を制御することで、ワークの位置や姿勢に拘らず、緻密(高精度)に作業することを可能にしている。しかしながら、このような緻密な作業をロボット装置に実行させる場合には、例えばロボット装置を工場に設置したときや作業内容やワークが変わったときに、作業者がロボットを調整する調整作業の負担が大きいという問題がある。例えば画像認識においてテンプレートマッチングを利用する手法では、テンプレート画像と撮像画像とを一致させる一致精度を上げるために、輝度補正や特徴量の抽出等を行う画像処理プロセスの調整が複雑であり、作業者の条件設定に時間がかかり、負担がかかる。
【0003】
そのため、ワークを撮像した画像を学習済み学習機に入力して2以上の部分抽出画像を取得し、それらの部分抽出画像をブロブ解析してブロブ情報を生成し、そのブロブ情報からワークの位置や角度を算出するものが提案されている(特許文献1参照)。これにより、特許文献1のものは、上述のような画像処理プロセスにおける調整作業の負荷の低減を図っている。
【0004】
また、物体の機能(アフォーダンス)に着眼し、機能を示す領域を三次元的に認識するための学習済モデルを生成するシステムも提案されている(非特許文献1参照)。非特許文献1のシステムは、学習済モデルを用いて、三次元的なロボットマニピュレータの作用領域特定し、ワークの把持や移載を行おうとしている。
【先行技術文献】
【特許文献】
【0005】
特開2020-197983号公報
日本ロボット学会誌 38巻6号,pp.525-529,2020 「物体の機能認識とロボットマニピュレーションへの応用」(橋本 学 著)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1のものは、二次元平面上におけるワークの位置及び角度の計測には対応しているが、ブロブ情報からワークの三次元的な位置や姿勢情報を算出することは困難であるという問題がある。そのため、作業の動作におけるロボットの軌道を自動的に生成させることは難しく、ロボットの駆動生成(教示)に時間がかかり、作業者によるロボットの調整作業に負担がかかる。
【0007】
また、上記非特許文献1のものは、大まかな動作の作業には対応できる可能性があるが、緻密な作業(高い認識精度)が要求されるものは実現が困難である。即ち、上記非特許文献1のものを採用しても、例えば緻密な組立作業等で、認識したワークの作業領域に対してロボットアームの精密な動作(軌道)を設定する必要があり、専門的な知識を有する作業者が設定を行う必要があって、やはり作業者の負担が大きい。
【0008】
そこで本発明は、作業者の負担を軽減することが可能なロボットシステム、ロボットシステムの制御方法、物品の製造方法、プログラム、及び記録媒体を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明の一態様は、ロボットと、ワークにおける作業を行う作業領域を探査し、前記作業領域の情報を含む探査データを取得する探査部と、前記作業領域に関する情報と、前記作業領域に関連付けられ、前記ワークに実行する作業に関する情報と、前記探査データと、に基づき、前記作業領域を特定すると共に特定した前記作業領域に作業を行うように前記ロボットを制御する制御部と、を備える、ことを特徴とするロボットシステムである。
【0010】
本発明の一態様は、ロボットと、ワークにおける作業を行う作業領域を探査する探査部と、制御部と、を備えるロボットシステムの制御方法において、前記探査部により前記作業領域の情報を含む探査データを取得し、前記制御部が、前記作業領域に関する情報と、前記作業領域に関連付けられ、前記ワークに実行する作業に関する情報と、前記探査データと、に基づき前記作業領域を特定し、特定した前記作業領域に作業を行うように前記ロボットを制御する、ことを特徴とするロボットシステムの制御方法である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
16日前
OMC株式会社
ロボット
2か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
19日前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
21日前
株式会社エビス
腰ベルト用連結具
2か月前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
15日前
工機ホールディングス株式会社
作業機
7日前
工機ホールディングス株式会社
作業機
7日前
株式会社スター精機
吸着パッド
15日前
学校法人五島育英会
アーム機構
21日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
7日前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社PILLAR
チューブ保持治具
26日前
株式会社アイエイアイ
グリッパー
1か月前
庄内機械株式会社
釘打装置
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
オークラ輸送機株式会社
ハンド装置
29日前
オークラ輸送機株式会社
ハンド装置
今日
株式会社不二越
垂直多関節ロボット
1か月前
株式会社スター精機
産業用ロボット
13日前
株式会社リコー
多関節ロボット
20日前
トヨタ自動車東日本株式会社
搬送治具
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1日前
株式会社マキタ
電動作業機
22日前
株式会社マキタ
電動作業機
22日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
13日前
株式会社安川電機
ロボット
13日前
株式会社ダイヘン
ロボット制御システム
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ