TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081015
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194486
出願日
2023-11-15
発明の名称
電動作業機
出願人
株式会社マキタ
代理人
名古屋国際弁理士法人
主分類
B25F
5/00 20060101AFI20250520BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ユーザインタフェースの構成の複雑化を抑えつつ、ユーザインタフェースへの容易な操作に基づいて複数の機能を選択的に実行させることを可能とする。
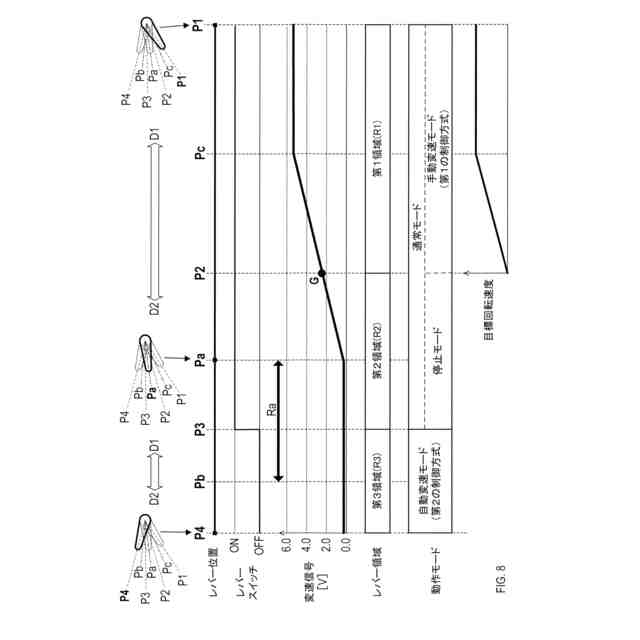
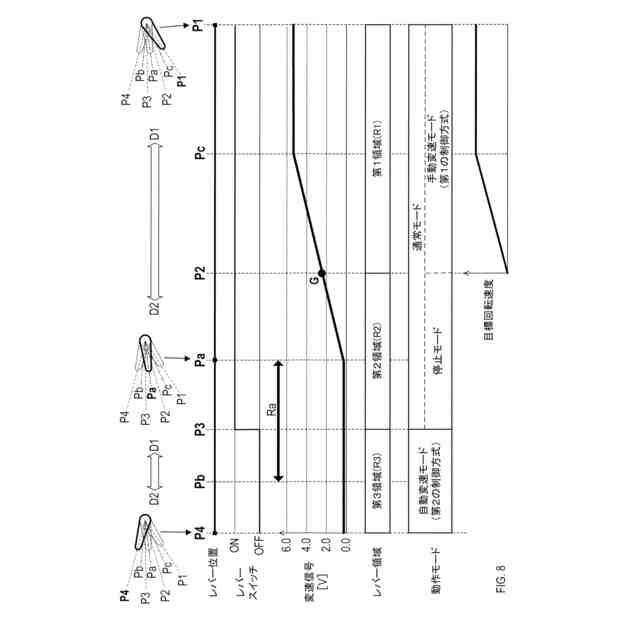
【解決手段】電動作業機は、モータと、第1操作部と、第2操作部と、制御回路とを備える。制御回路は、第1操作部が駆動操作されていて且つ第2操作部が第1領域に移動されていることに基づいて、モータを第1の制御方式で回転させる。制御回路は、第1操作部が駆動操作されていない及び/または第2操作部が第2領域に移動されていることに基づいて、モータを停止させる。制御回路は、第1操作部が駆動操作されていて且つ第2操作部が第3領域に移動されていることに基づいて、モータを第2の制御方式で回転させる。
【選択図】図8
特許請求の範囲
【請求項1】
モータと、
手動により駆動操作されるように構成された第1操作部と、
手動により、第1領域、第2領域及び第3領域を含む移動範囲内を移動されるように構成された第2操作部と、
制御回路であって、
前記第1操作部が前記駆動操作されていて且つ前記第2操作部が前記第1領域に移動されていることに基づいて、前記モータを第1の制御方式で回転させ、
前記第1操作部が前記駆動操作されていない及び/または前記第2操作部が前記第2領域に移動されていることに基づいて、前記モータを停止させ、
前記第1操作部が前記駆動操作されていて且つ前記第2操作部が前記第3領域に移動されていることに基づいて、前記モータを、前記第1の制御方式とは異なる第2の制御方式で回転させる、
ように構成された制御回路と、
を備える電動作業機。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の電動作業機であって、
前記第2領域は、前記第2操作部が前記第1領域と前記第3領域との間を移動される際に前記第2領域を通過するように配置されている、
電動作業機。
【請求項3】
請求項1または請求項2に記載の電動作業機であって、
前記制御回路は、前記第2操作部が前記第1領域から前記第3領域へ直接または前記第2領域を介して移動された場合、前記モータを停止させるように構成されている、
電動作業機。
【請求項4】
請求項3に記載の電動作業機であって、
前記制御回路は、前記第2操作部が前記第1領域から前記第3領域へ移動されたことに応じて前記モータを停止させた後、前記第1操作部が特定操作された場合、前記モータを前記第2の制御方式で回転させるように構成されており、前記特定操作は、前記第1操作部への前記駆動操作を解除して再び前記第1操作部を前記駆動操作することを含む、
電動作業機。
【請求項5】
請求項1または請求項2に記載の電動作業機であって、
前記制御回路は、前記第2操作部が前記第3領域から前記第1領域へ直接または前記第2領域を介して移動された場合、前記モータを停止させるように構成されている、
電動作業機。
【請求項6】
請求項5に記載の電動作業機であって、
前記制御回路は、前記第2操作部が前記第3領域から前記第1領域へ移動されたことに応じて前記モータを停止させた後、前記第1操作部が特定操作された場合、前記モータを前記第1の制御方式で回転させるように構成されており、前記特定操作は、前記第1操作部への前記駆動操作を解除して再び前記第1操作部を前記駆動操作することを含む、
電動作業機。
【請求項7】
請求項1または請求項2に記載の電動作業機であって、
前記第1の制御方式は、
前記第1領域における前記第2操作部の位置に応じて目標回転速度を設定し、
設定されている前記目標回転速度で前記モータを回転させる、
ことを含む、
電動作業機。
【請求項8】
請求項2に記載の電動作業機であって、
前記第1の制御方式は、
前記第1領域において前記第2操作部が前記第2領域から離れるに従って大きくなるように目標回転速度を設定し、
設定されている前記目標回転速度で前記モータを回転させる、
ことを含む、
電動作業機。
【請求項9】
請求項1または請求項2に記載の電動作業機であって、
前記第2の制御方式は、
前記モータを回転させているときに前記モータが受ける負荷の大きさに応じて目標回転速度を設定し、
設定されている前記目標回転速度で前記モータを回転させる、
ことを含む、
電動作業機。
【請求項10】
請求項9に記載の電動作業機であって、
前記第2の制御方式は、前記負荷の大きさが閾値未満の場合は前記目標回転速度を第1速度に設定し、前記負荷の大きさが前記閾値以上の場合は前記目標回転速度を第1速度よりも大きい第2速度に設定することを含む、
電動作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動作業機におけるモータを制御する技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1は、トリガスイッチ及び操作入力部を備えた草刈機を開示している。トリガスイッチ及び操作入力部は、草刈機のユーザにより手動操作されるユーザインタフェースである。操作入力部は、主電源スイッチ、逆転スイッチなどを備える。ユーザは、操作入力部を操作することによって、モータの回転方向を切り替えたりモータの回転速度を切り替えたりすることができる。
【先行技術文献】
【特許文献】
【0003】
特許第6357086号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
草刈機が高機能化するほど、操作入力部の構成が複雑化したり、所望の機能を果たすために複雑な入力操作が要求される可能性がある。このような可能性は草刈機以外の各種の電動作業機においても生じ得る。
【0005】
本開示の1つの局面は、ユーザインタフェースの構成の複雑化を抑えつつ、ユーザインタフェースへの容易な操作に基づいて複数の機能を選択的に実行させることが可能な電動作業機を提供するする。
【課題を解決するための手段】
【0006】
本開示の1つの局面は、モータと、第1操作部と、第2操作部と、制御回路とを備える 電動作業機を提供する。
第1操作部は、手動により駆動操作される。第2操作部は、手動により、第1領域、第2領域及び第3領域を含む移動範囲内を移動される。制御回路は、第1操作部が駆動操作されていて且つ第2操作部が第1領域に移動されていることに基づいて、モータを第1の制御方式で回転させる。制御回路は、第1操作部が駆動操作されていない及び/または第2操作部が第2領域に移動されていることに基づいて、モータを停止させる。制御回路は、第1操作部が駆動操作されていて且つ第2操作部が第3領域に移動されていることに基づいて、モータを第2の制御方式で回転させる。第2の制御方式は第1の制御方式とは異なる。
【0007】
このように構成された電動作業機では、ユーザインタフェースとして第1,第2操作部を備える。そして、モータを第1の制御方式で回転させるか、モータを第2の制御方式で回転させるか、それともモータを停止させるかを、第2操作部の位置を手動で変化させることによって切り替えることができる。そのため、ユーザインタフェースの構成の複雑化を抑えつつ、ユーザインタフェースへの容易な操作に基づいて複数の機能を選択的に実行させることができる。
【図面の簡単な説明】
【0008】
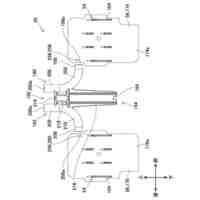
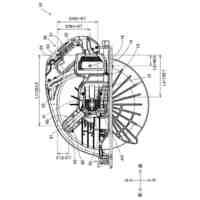
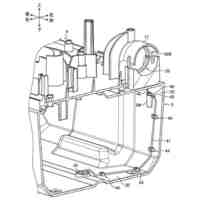
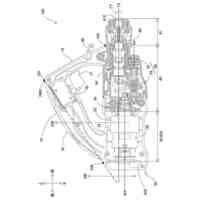
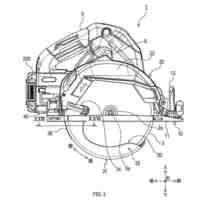
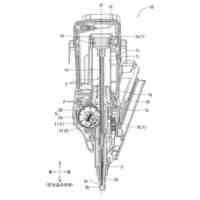
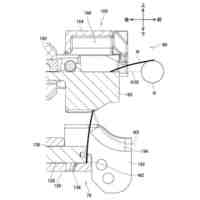
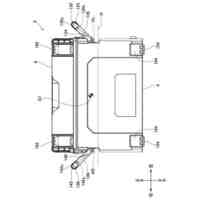
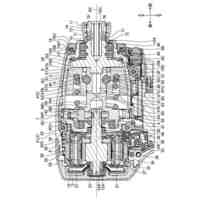
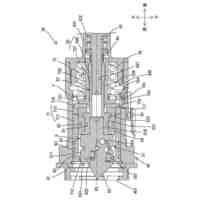
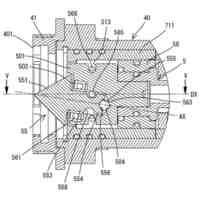
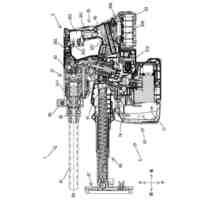
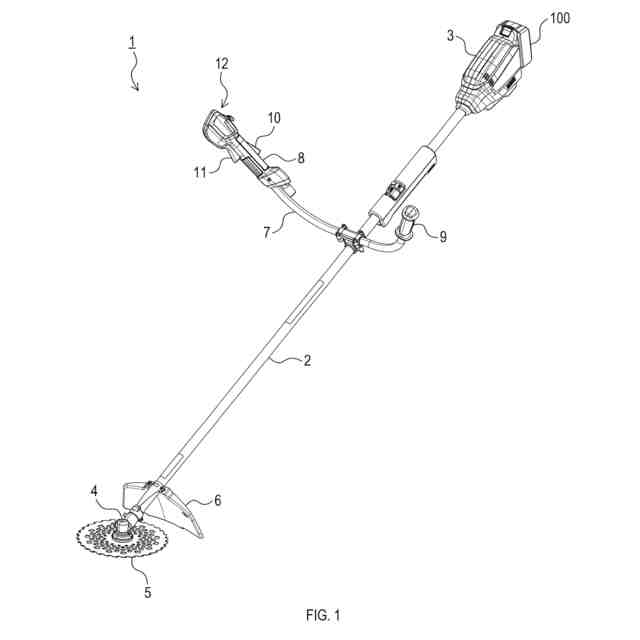
実施形態の電動作業機の斜視図である。
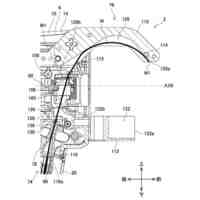
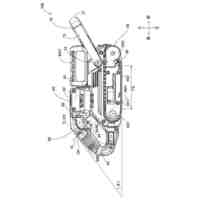
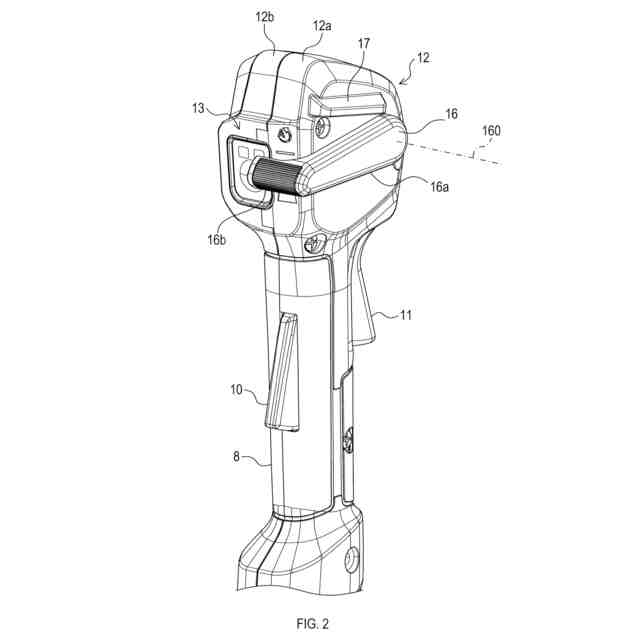
右グリップ及び操作ユニットの斜視図である。
操作パネルの説明図である。
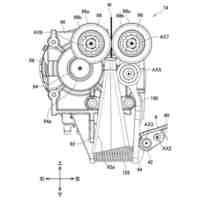
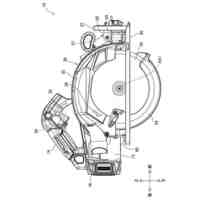
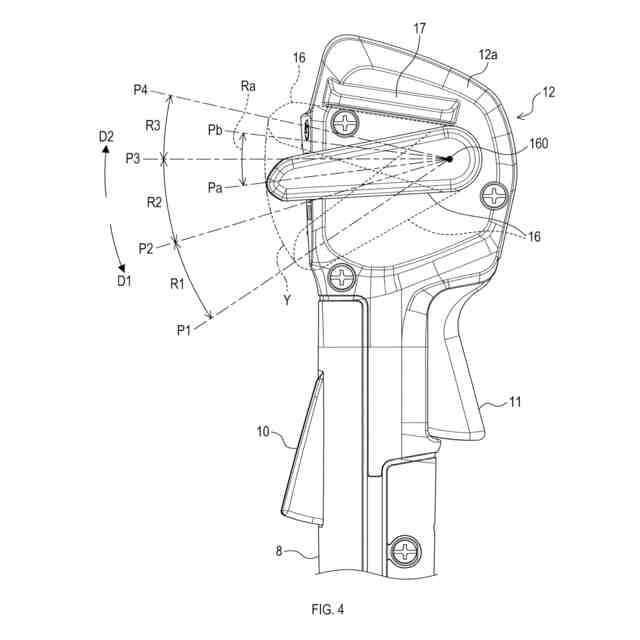
右グリップ及び操作ユニットの側面図である。
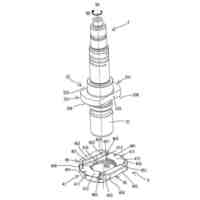
第1半割ハウジング及びレバーが省かれた状態の、右グリップ及び操作ユニットの側面図である。
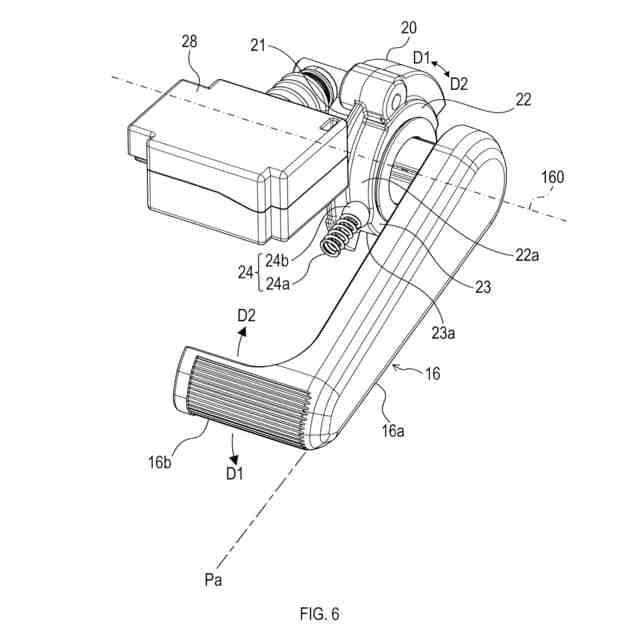
レバー及、レバー支持部材及びスイッチボックスの斜視図である。
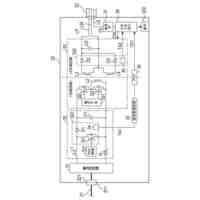
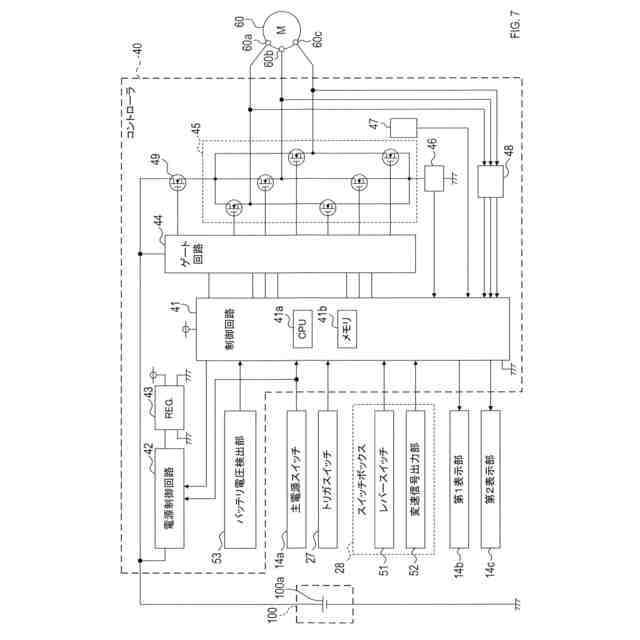
電動作業機の電気的構成を示す説明図である。
レバーの位置に応じた電動作業機の各種状態を示す説明図である。
主電源状態設定処理のフローチャートである。
モード切替検知処理のフローチャートである。
動作モード設定処理のフローチャートである。
モータ制御処理のフローチャートである。
【発明を実施するための形態】
【0009】
[1.実施形態の総括]
ある実施形態は、以下の特徴1~8のうちの少なくともいずれか1つを備えている電動作業機を提供してもよい。
・特徴1:モータ。
・特徴2:手動により駆動操作されるように構成された第1操作部。
・特徴3:手動により移動範囲内を移動されるように構成された第2操作部。
・特徴4:前記移動範囲は、第1領域、第2領域及び第3領域を含む。
・特徴5:制御回路。
・特徴6:前記制御回路は、前記第1操作部が前記駆動操作されていて且つ前記第2操作部が前記第1領域に移動されていることに基づいて、前記モータを第1の制御方式で回転させる。
・特徴7:前記制御回路は、前記第1操作部が前記駆動操作されていない及び/または前記第2操作部が前記第2領域に移動されていることに基づいて、前記モータを停止させる。
・特徴8:前記制御回路は、前記第1操作部が前記駆動操作されていて且つ前記第2操作部が前記第3領域に移動されていることに基づいて、前記モータを、前記第1の制御方式とは異なる第2の制御方式で回転させる。
【0010】
少なくとも特徴1~8を備えている電動作業機は、ユーザインタフェースの構成の複雑化を抑えつつ、ユーザインタフェースへの容易な操作に基づいて複数の機能を選択的に実行させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電気機器
17日前
株式会社マキタ
回転工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
マルノコ
1か月前
株式会社マキタ
集じん機
26日前
株式会社マキタ
電気機器
17日前
株式会社マキタ
打撃工具
17日前
株式会社マキタ
鉄筋結束機
1日前
株式会社マキタ
電動作業機
17日前
株式会社マキタ
鉄筋結束機
1日前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
携帯用切断機
24日前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
ベルトサンダ
1か月前
株式会社マキタ
背負式ブロワ
16日前
株式会社マキタ
フレア形成工具
17日前
株式会社マキタ
携帯用バンドソー
17日前
株式会社マキタ
作業機及び表示器
1か月前
株式会社マキタ
木工用携帯用切削機
1か月前
株式会社マキタ
電気機器およびケース
17日前
株式会社マキタ
電気機器および運搬ケース
17日前
株式会社マキタ
鉄筋結束機および結束方法
1日前
株式会社マキタ
電気機器および運搬ケース
17日前
株式会社マキタ
インパクト工具及びスピンドル
1か月前
株式会社マキタ
フレア形成装置及びフレア形成工具
17日前
株式会社マキタ
フレア形成装置及びフレア形成工具
17日前
株式会社マキタ
充電システム、電源アダプタ、及び充電器
17日前
株式会社マキタ
電動工具用の真空吸着アタッチメント及び電動工具システム
2日前
株式会社マキタ
鉄筋結束ロボット
1か月前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
19日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ