TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090486
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2024005573
出願日
2024-01-17
発明の名称
画像認識モデルのトレーニング方法及びその画像認識モデル
出願人
輝創電子股分有限公司
代理人
弁理士法人 東和国際特許事務所
主分類
G06T
7/187 20170101AFI20250610BHJP(計算;計数)
要約
【課題】画像認識モデルがより優れた認識能力を有する効果を達成する画像認識モデルのトレーニング方法及びその画像認識モデルを提供する。
【解決手段】画像認識モデルのトレーニング方法は、物体画像により囲まれた画像領域がこの画像領域を超えずに既定の面積により完全に覆われることができないと判定された場合、物体画像全体を調整済物体画像に拡大させる物体画像拡大ステップであって、調整済物体画像により囲まれた画像領域が、この画像領域を超えずに既定の面積により完全に覆われることができる物体画像拡大ステップと、トレーニング対象の画像認識モデルに物体画像拡大ステップによる処理後の画像を入力してトレーニングを行うことによりトレーニング済画像認識モデルを取得するステップと、を含む。
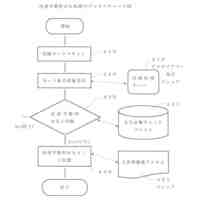
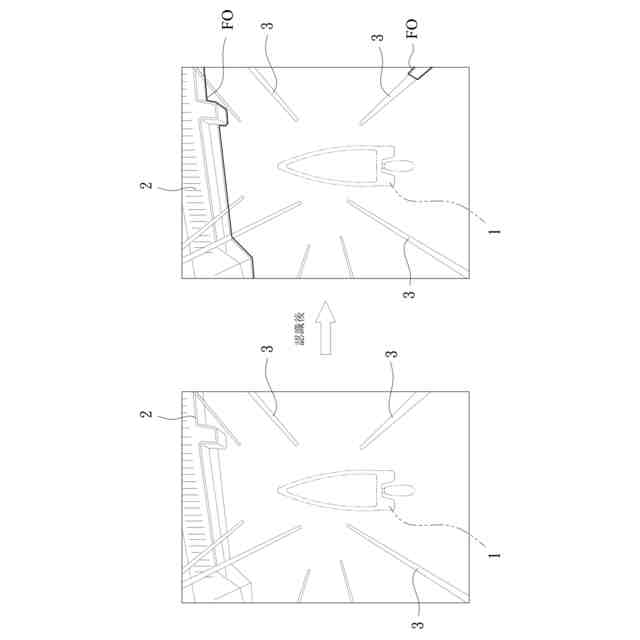
【選択図】図1
特許請求の範囲
【請求項1】
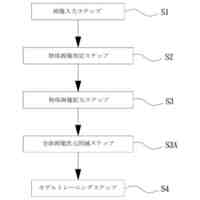
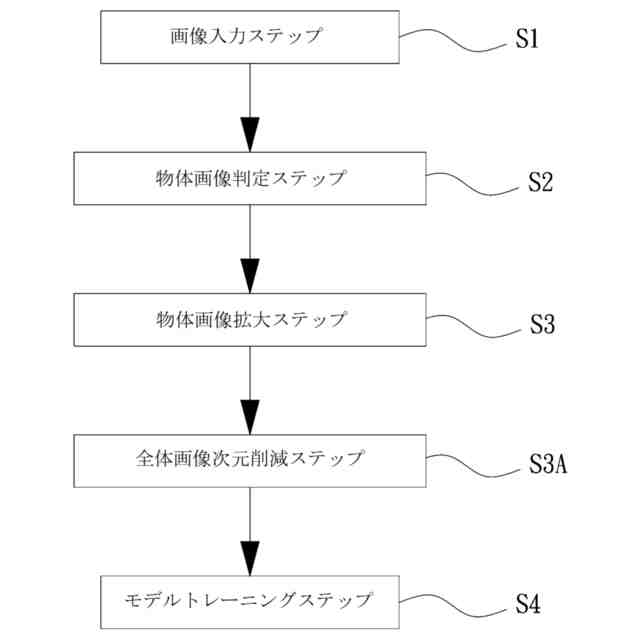
物体画像を含むサブ領域が含まれ、前記物体画像を構成する画像面積以上の画像面積を有する認識対象画像を取得することを含む画像入力ステップと、
前記物体画像により囲まれた画像領域が、前記画像領域を超えずに1又は複数の既定の面積により完全に覆われることができるか否かを判定することを含む物体画像判定ステップと、
前記物体画像により囲まれた画像領域の全体又は一部が、前記画像領域を超えずに前記既定の面積により完全に覆われることができないと判定された場合、前記物体画像全体を調整済物体画像に拡大させ、前記調整済物体画像により囲まれた画像領域が、前記画像領域を超えずに1又は複数の前記既定の面積により完全に覆われることができるようにすることを含む物体画像拡大ステップと、
トレーニング対象の画像認識モデルに、前記調整済物体画像を含む前記認識対象画像を入力してトレーニングを行うことにより、トレーニング済画像認識モデルを取得することを含むモデルトレーニングステップとを含み、
前記トレーニング対象の画像認識モデルは、最小認識面積を有し、前記調整済物体画像により囲まれた画像領域を超えずに、前記画像領域を1又は複数の最小認識面積により完全に覆うことができ、
前記既定の面積は、前記最小認識面積以上である、画像認識モデルのトレーニング方法。
続きを表示(約 1,400 文字)
【請求項2】
前記既定の面積と前記最小認識面積とは等しい、請求項1に記載の画像認識モデルのトレーニング方法。
【請求項3】
前記認識対象画像は、第1軸方向画素点の数と第2軸方向画素点の数との積により定義される画像画素サイズを有し、
前記既定の面積は、第1軸方向画素点の数と第2軸方向画素点の数との積により定義される既定の画素サイズを有し、
前記既定の面積の前記第1軸方向画素点の数と前記第2軸方向画素点の数のうちの一方又は両方は、前記認識対象画像の前記第1軸方向画素点の数又は前記第2軸方向画素点の数の0.008倍から0.08倍の間に定義される値である、請求項1に記載の画像認識モデルのトレーニング方法。
【請求項4】
前記最小認識面積は、第1軸方向画素点の数と第2軸方向画素点の数との積により定義される最小認識画素サイズを有し、
前記第1軸方向画素点の数と前記第2軸方向画素点の数は、それぞれ少なくとも1画素点である、請求項1に記載の画像認識モデルのトレーニング方法。
【請求項5】
前記モデルトレーニングステップの実行前に、前記認識対象画像全体の画像画素サイズを縮小させる、請求項1に記載の画像認識モデルのトレーニング方法。
【請求項6】
前記トレーニング対象の画像認識モデルは、セマンティックセグメンテーションモデルである、請求項1から請求項5のいずれか1項に記載の画像認識モデルのトレーニング方法。
【請求項7】
認識可能な最小解像度として定義される最小認識面積を含む画像認識モデルであって、
前記画像認識モデルは、認識対象画像における物体画像を認識するためのものであり、
前記物体画像は、非原始識別可能な物体画像を含み、或いは、前記物体画像は、原始識別可能な物体画像と前記非原始識別可能な物体画像とを含み、
前記原始識別可能な物体画像は、それにより囲まれた画像領域を超えずに、その画像領域の全体が1又は複数の最小認識面積により完全に覆われるように定義され、
前記非原始識別可能な物体画像は、それにより囲まれた画像領域を超えずにその画像領域の全体又は一部が前記最小認識面積により完全に覆われることができないように定義される、画像認識モデル。
【請求項8】
前記画像認識モデルは、前記物体画像を認識した場合、対応する物体表示枠を前記物体画像の画像領域の外周に生成する、請求項7に記載の画像認識モデル。
【請求項9】
前記画像認識モデルは、前記原始識別可能な物体画像に対応する物体を認識した場合、対応する原始物体表示枠を前記原始識別可能な物体画像の画像領域の外周に生成し、
前記原始物体表示枠と前記原始識別可能な物体画像の画像領域の境界とは第1距離があり、
前記画像認識モデルは、前記非原始識別可能な物体画像に対応する物体を認識した場合、対応する非原始物体表示枠を前記非原始識別可能な物体画像の画像領域の外周に生成し、
前記非原始物体表示枠と前記非原始識別可能な物体画像の画像領域の境界とは、前記第1距離よりも大きい第2距離がある、請求項8に記載の画像認識モデル。
【請求項10】
請求項1から請求項6のいずれか1項に記載の画像認識モデルのトレーニング方法に基づいて構築される、請求項7から請求項9のいずれか1項に記載の画像認識モデル。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理技術に関し、特に、画像認識モデルのトレーニング方法、及び、その画像認識モデルに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来の画像認識モデルでは、特に、セマンティックセグメンテーションモデルにより構築される画像認識モデルでは、種々の物体タグを有する認識対象画像を入力することによりトレーニングを行っている。
ところで、この画像認識モデルに最小認識面積(Minimum Recognizable Area)があるため、モデルトレーニング用の認識対象画像に含まれる物体画像により囲まれた画像領域がこの画像領域を超えずに1つの最小認識面積により完全に覆われることができない場合、対応する物体タグ(Tag)を有する物体であっても、画像認識モデルは、トレーニング中とトレーニング完成後に認識モデルの最小認識面積よりも小さい物体を認識対象画像から認識することができない。
このように認識できない状況は、画像認識モデルのトレーニング又は認識速度を向上させるために、トレーニング又は認識前に予め認識対象画像に対して全体画像サイズを縮減させた場合、より一層悪化する。
【0003】
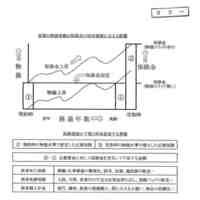
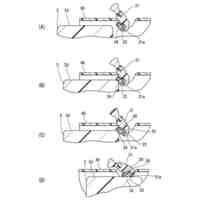
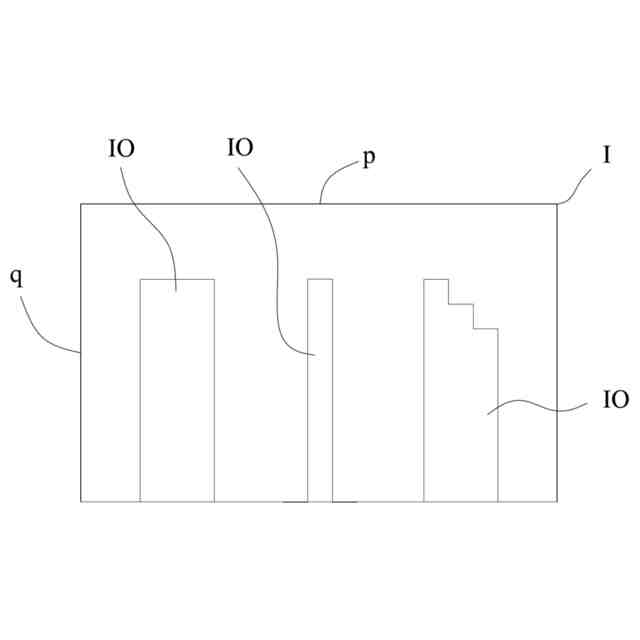
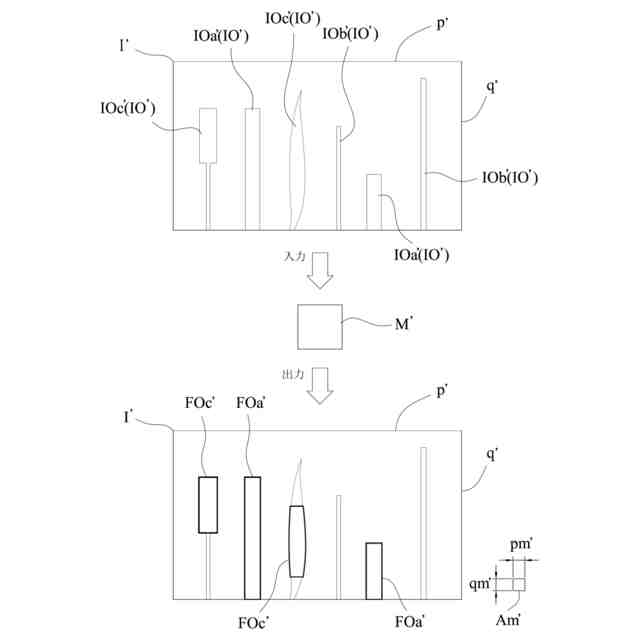
上記従来の画像認識モデルに発生する問題を図8に示す。
符号M’は、最小認識面積Am’を有する従来の画像認識モデルを示す。
符号I’は、認識対象画像を示し、この認識対象画像I’は、第1軸方向画素点p’と第2軸方向画素点q’とを有し、少なくとも1つの物体画像IO’を含む。
そして、この物体画像IO’は、第1類物体画像IOa’、第2類物体画像IOb’及び第3類物体画像IOc’に分類されてもよい。
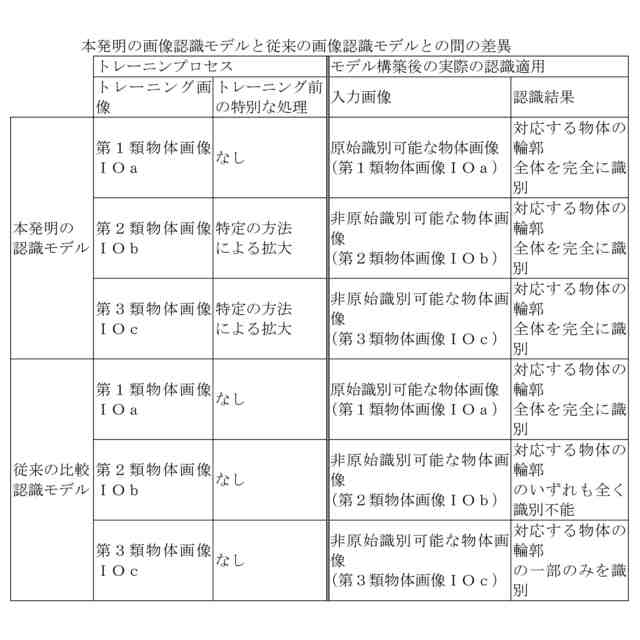
さらに、第1類物体画像IOa’により囲まれた画像領域は、1又は複数の最小認識面積Am’によって画像領域を超えずに完全に覆われることができるため、認識されて対応する物体表示枠FOa’でマークされることができ、この物体表示枠FOa’内は、完全に認識された第1類物体である。
第2類物体画像IOb’により囲まれた画像領域の全体は、1つの最小認識面積Am’によって画像領域を超えずに完全に覆われることができないため、認識される(対応する物体表示枠でマークされる)ことができない。
第3類物体画像IOc’により囲まれた画像領域の一部は、1つの最小認識面積Am’によって画像領域を超えずに完全に覆われることができないため、認識されることができないが、第3類物体画像IOc’により囲まれた画像領域の他の一部は、1又は複数の最小認識面積Am’によって画像領域を超えずに完全に覆われることができるため、認識されて対応する物体表示枠FOc’でマークされることができる。
この場合、第3類物体画像IOc’が完全に認識されていないと見なしてもよい。
換言すれば、物体画像IO’に対応する画像領域の全体又は一部が、最小認識面積Am’を収容できない場合、物体画像IO’の全体又は一部は、認識されることができない。
【0004】
特に、画像識別技術において、物体画像IO’が完全に認識可能であるとは、最小認識面積Am’の位置と角度を適宜変更することで、物体画像IO’のいずれの境界も超えずに、重畳する又は重畳しない接合により、物体画像IO’により囲まれた画像領域を再現できると理解してもよい。
一方、物体画像IO’の全体又は一部が認識不能であるとは、最小認識面積Am’の位置と角度をどのように変更しても、物体画像IO’の境界の少なくとも1つを超えてしまうことになると理解してもよい。
【0005】
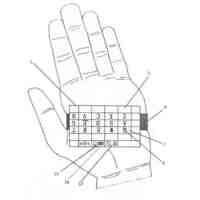
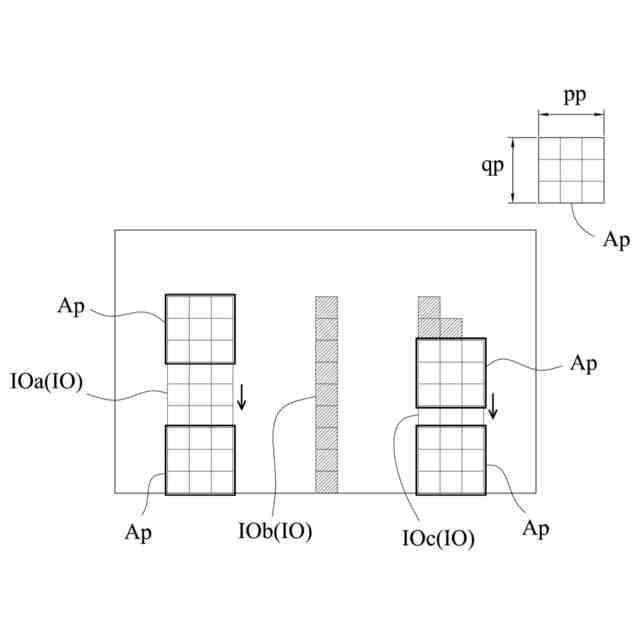
例えば、図9に示すように、最小認識面積Am’は、第1軸方向における最小認識可能画素点の数pm’と、第2軸方向における最小認識可能画素点の数qm’からなる最小認識画素サイズpm’×qm’とを有する。
なお、pm’とqm’は、通常同じである。
最小認識画素サイズが2画素点(pm’)×2画素点(qm’)であることを例として、第1類物体画像IOa’に対応する画像は、第1軸方向画素点pa’が4であり、第2軸方向画素点qa’が40であり、それに応じて、4画素点(pa’)×40画素点(qa’)である画素サイズを有する場合、第1類物体画像IOa’で規定される画像領域は、1又は複数の最小認識面積Am’によって、その画像領域を超えずに完全に覆われることができるので、第1類物体画像IOa’は、完全に認識されることができる。
【0006】
第2類物体画像IOb’に対応する画像は、第1軸方向画素点pb’が30であり、第2軸方向画素点qb’が1であり、それに応じて、30画素点(pb’)×1画素点(qb’)である画素サイズを有する場合、第2類物体画像IOb’で規定される画像領域全体は、最小認識面積Am’を収容できない(即ち、この最小認識面積Am’がどの位置でも第2類物体画像IOb’で規定される画像領域を超える)ので、この第2類物体画像IOb’は、全く認識されることができない。
【0007】
第3類物体画像IOc’に対応する画像の画素サイズに、例えば、閾値エッジCB’が含まれ、この閾値エッジCB’の有する画素点の数が最小認識可能画素サイズにおける小さい方の画素点の数とちょうど等しく、閾値エッジCB’の有する画素点の数が閾値画素点の数として定義される場合、第3類物体画像IOc’は、閾値エッジCB’の閾値画素点の数以上の側とこの閾値エッジCB’の閾値画素点の数よりも小さい側との両方に、それぞれ第1局部画像IOc1’と第2局部画像IOc2’とに分けられる。
第1局部画像IOc1’は、閾値エッジCB’の一方側における画素点の数が、いずれも閾値画素点の数以上であり、第1局部画像IOc1’で規定される画像領域は、1又は複数の前記最小認識面積Am’により、その画像領域を超えずに完全に覆われることができるので、第3類物体画像IOc’の一部(第1局部画像IOc1’に対応する一部)は、認識されることができる。
第2局部画像IOc2’は、閾値エッジCBの他方側における画素点の数が、いずれも閾値画素点の数よりも小さく、第2局部画像IOc2’で規定される画像領域全体が、最小認識面積Am’を収容できないので、第3類物体画像IOc’の他の一部(第2局部画像IOc2’に対応する一部)は、認識されることができない。
換言すれば、物体画像IO’の一部の領域の境界の最大画素点の数が、最小認識可能画素サイズにおける最も小さい画素点の数よりも小さい場合、この物体画像IO’の一部の領域は、認識されることができない。
【0008】
ここで、第2類物体画像IOb’全体が認識不能であり、又は、第3類物体画像IOc’の一部が認識不能であることにより、認識結果の欠損/不完全になり、ひいては、安全面の問題に繋がる。
例えば、画像認識機能を運転に利用した用途において、例えば、輸送手段の運転又は駐車機能を実行する場合、障害物を完全に認識できないと、輸送手段の運転支援システム又は、自動運転システムによる認識結果の判定に用いられる情報に欠損が生じ、予想外の衝突によって危険が生じるリスクが高まることがある。
或いは、空間における補助標識(例えば車線や駐車線)を完全に認識できないと、予想外のずれの発生率が高くなり、潜在危険が生じる可能性が大きくなることがある。
【0009】
これに鑑みて、従来の画像処理技術は、確かに改善の余地がある。
【先行技術文献】
【特許文献】
【0010】
台湾特許第762562号
【発明の概要】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
輝創電子股分有限公司
水上障害物の検知方法
3日前
輝創電子股分有限公司
画像認識モデルのトレーニング方法及びその画像認識モデル
23日前
個人
対話装置
28日前
個人
情報処理装置
28日前
個人
情報処理装置
24日前
個人
記入設定プラグイン
16日前
個人
検査システム
2日前
個人
プラグインホームページ
1か月前
株式会社サタケ
籾摺・調製設備
1日前
個人
情報入力装置
28日前
キヤノン電子株式会社
携帯装置
1日前
個人
不動産売買システム
8日前
個人
物価スライド機能付生命保険
28日前
個人
マイホーム非電子入札システム
28日前
サクサ株式会社
中継装置
1日前
キヤノン株式会社
情報処理装置
1日前
キヤノン株式会社
情報処理装置
1日前
株式会社BONNOU
管理装置
21日前
キヤノン電子株式会社
名刺管理システム
2日前
個人
決済手数料0%のクレジットカード
1か月前
サクサ株式会社
カードの制動構造
1か月前
株式会社東芝
電子機器
9日前
アスエネ株式会社
排水量管理方法
1日前
東洋電装株式会社
操作装置
1日前
ホシデン株式会社
タッチ入力装置
8日前
東洋電装株式会社
操作装置
1日前
株式会社ワコム
電子消去具
8日前
個人
パターン抽出方法及び通信多重化方法
7日前
株式会社ライト
情報処理装置
21日前
村田機械株式会社
割当補助システム
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社JVCケンウッド
管理装置
2日前
大王製紙株式会社
RFIDタグ
7日前
Sansan株式会社
組織図生成装置
1か月前
住友重機械工業株式会社
力覚伝達装置
23日前
応研株式会社
業務支援システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ