TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092137
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207825
出願日
2023-12-08
発明の名称
運転操作状態推定装置および運転操作状態推定方法
出願人
株式会社京三製作所
代理人
個人
,
個人
,
個人
主分類
B61L
25/04 20060101AFI20250612BHJP(鉄道)
要約
【課題】列車の運転操作状態を推定するための新たな技術を提供すること。
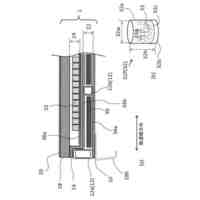
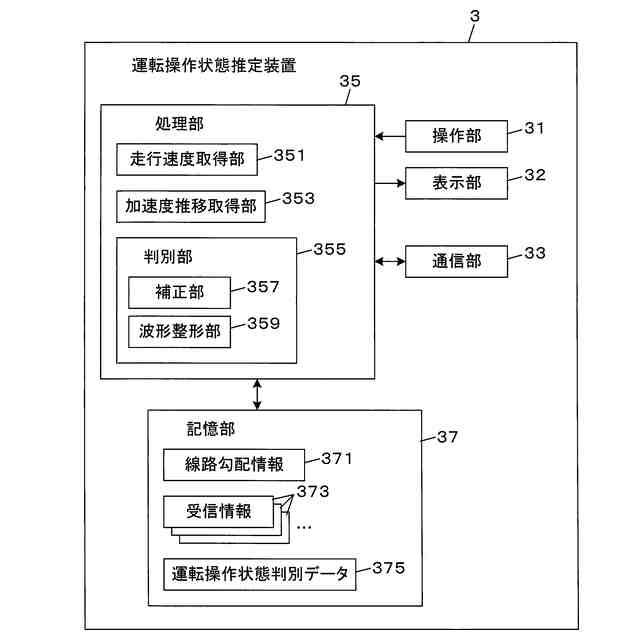
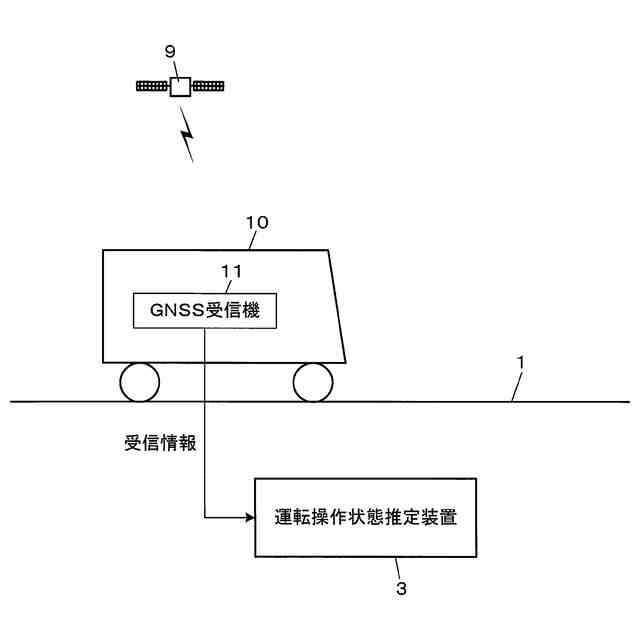
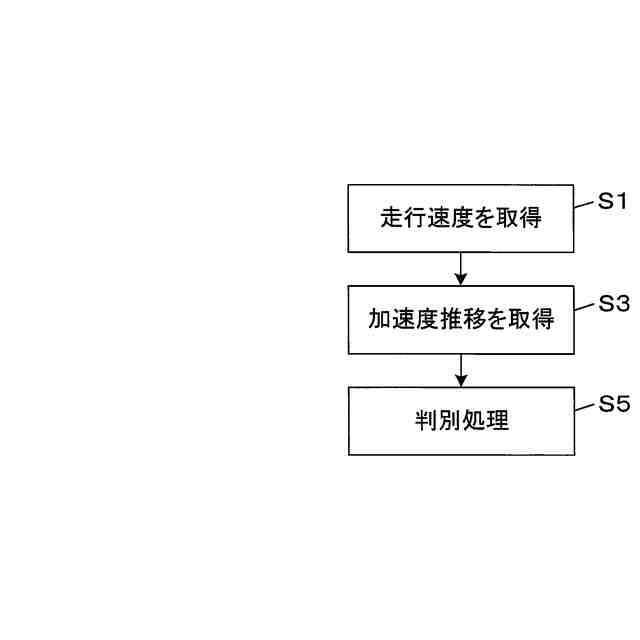
【解決手段】運転操作状態推定装置3は、列車の運転操作状態を推定する。運転操作状態推定装置3は、列車に設置されたGNSS受信機による受信情報に基づいて走行中の加速度推移を取得する加速度推移取得部353と、加速度推移に基づいて、運転操作状態が、力行状態、惰行状態およびブレーキ状態の何れであるかを判別する判別部355と、を備える。
【選択図】図12
特許請求の範囲
【請求項1】
列車の運転操作状態を推定する運転操作状態推定装置であって、
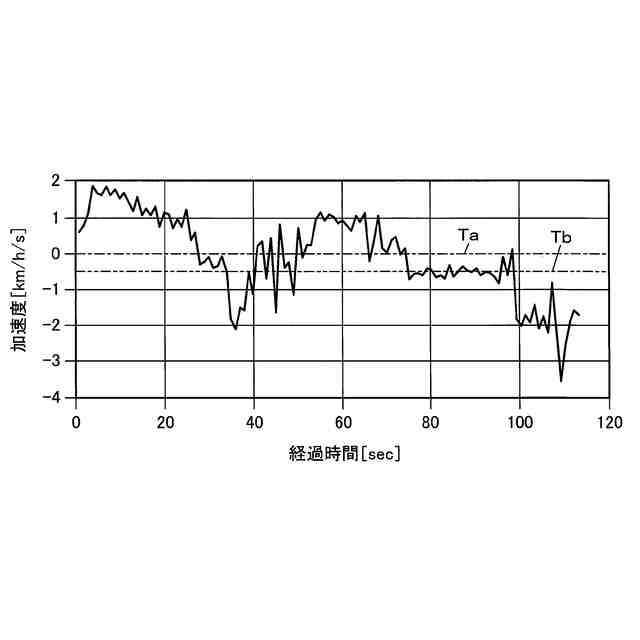
列車走行中の加速度推移をアナログ波形として取得する加速度推移取得手段と、
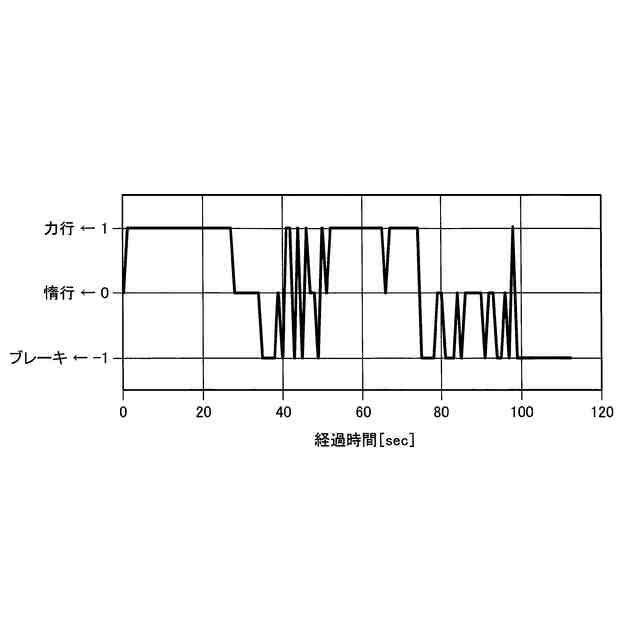
前記加速度推移に基づいて、前記運転操作状態が、力行状態、惰行状態およびブレーキ状態の何れであるかを判別する判別手段と、
を備え、
前記判別手段は、前記アナログ波形の前記加速度推移を所定の閾値条件を用いて多段階の量子化波形に整形する波形整形手段を有し、当該量子化波形に基づいて前記判別を行う、
運転操作状態推定装置。
続きを表示(約 1,000 文字)
【請求項2】
前記波形整形手段は、
前記多段階の量子化波形として3段階の量子化波形に整形することと、
前記整形後の量子化波形のうち、不適切に切り替える運転操作と判断される所定の短時間変化条件を満たす波形部分を継続波に加工することと、
前記加工後の波形に基づいて前記判別を行うことと、
を実行する、
請求項1に記載の運転操作状態推定装置。
【請求項3】
前記加速度推移取得手段は、前記列車に設置されたGNSS(Global Navigation Satellite System)受信機による受信情報、又は、前記列車に設置された慣性計測装置の計測情報に基づいて前記加速度推移を取得する、
請求項1又は2に記載の運転操作状態推定装置。
【請求項4】
走行地点の線路勾配を取得する線路勾配取得手段、
を更に備え、
前記判別手段は、前記線路勾配に基づいて前記アナログ波形の前記加速度推移を補正する補正手段を有し、
前記波形整形手段は、前記補正手段による補正後の前記加速度推移を整形することで前記量子化波形に整形する、
請求項1又は2に記載の運転操作状態推定装置。
【請求項5】
前記加速度推移取得手段は、前記列車に設置されたGNSS(Global Navigation Satellite System)受信機による受信情報に含まれる走行速度について平滑化処理を行い、当該平滑化処理後の走行速度に基づいて前記加速度推移を取得する、
請求項1又は2に記載の運転操作状態推定装置。
【請求項6】
前記判別手段は、前記走行速度に基づいて前記閾値条件を可変に設定する閾値条件設定手段を有する、
請求項5に記載の運転操作状態推定装置。
【請求項7】
列車の運転操作状態を推定する運転操作状態推定方法であって、
列車走行中の加速度推移をアナログ波形として取得することと、
前記加速度推移に基づいて、前記運転操作状態が、力行状態、惰行状態およびブレーキ状態の何れであるかを判別することと、
を含み、
前記判別することは、前記アナログ波形の前記加速度推移を所定の閾値条件を用いて多段階の量子化波形に整形した当該量子化波形に基づいて前記判別を行うことである、
運転操作状態推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、列車の運転操作状態を推定する運転操作状態推定装置等に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
列車の走行中に運転士の手元等を撮像し、ハンドル操作やブレーキ操作といった運転士の動きを含む運転状況を記録する装置が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-221902号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は運転席の映像を記録する装置であり、運転操作を推定する装置ではない。特許文献1の運転状況記録装置で記録された映像から運転操作を推定するためには、記録された映像を解析し、或いは目視により確認する作業等が必要となる。
【0005】
本発明が解決しようとする課題は、列車の運転操作状態を推定するための新たな技術を提供することである。
【課題を解決するための手段】
【0006】
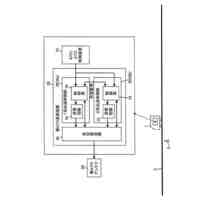
上記課題を解決するための第1の発明は、列車の運転操作状態を推定する運転操作状態推定装置であって、列車走行中の加速度推移をアナログ波形として取得する加速度推移取得手段(例えば、図12の加速度推移取得部353)と、前記加速度推移に基づいて、前記運転操作状態が、力行状態、惰行状態およびブレーキ状態の何れであるかを判別する判別手段(例えば、図12の判別部355)と、を備え、前記判別手段は、前記アナログ波形の前記加速度推移を所定の閾値条件を用いて多段階の量子化波形に整形する波形整形手段を有し、当該量子化波形に基づいて前記判別を行う、運転操作状態推定装置である。
【0007】
第1の発明によれば、列車の走行中の加速度推移をアナログ波形として取得し、取得した加速度推移を多段階の量子化波形に整形して用いて、列車の運転操作状態が力行状態、惰行状態およびブレーキ状態の何れであるかを判別することが可能となる。
【0008】
第2の発明は、上記の発明において、前記波形整形手段は、前記多段階の量子化波形として3段階の量子化波形に整形することと、前記整形後の量子化波形のうち、不適切に切り替える運転操作と判断される所定の短時間変化条件を満たす波形部分を継続波に加工することと、前記加工後の波形に基づいて前記判別を行うことと、を実行する、運転操作状態推定装置である。
【0009】
第2の発明によれば、加速度推移を3段階の量子化波形に整形し、短時間で段階が変化する波形部分を継続波に加工した上で、運転操作状態を判別することができる。これによれば、運転操作状態の判別精度を向上させることが可能となる。
【0010】
第3の発明は、上記の発明において、前記加速度推移取得手段が、前記列車に設置されたGNSS(Global Navigation Satellite System)受信機による受信情報、又は、前記列車に設置された慣性計測装置の計測情報に基づいて前記加速度推移を取得する、運転操作状態推定装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本信号株式会社
検査装置
5か月前
個人
車両及び走行システム
2か月前
日本信号株式会社
ホーム柵装置
2か月前
近畿車輌株式会社
鉄道車両の床構造
6か月前
日本車輌製造株式会社
台車組立装置
21日前
近畿車輌株式会社
鉄道車両の床構造
6か月前
川崎車両株式会社
鉄道車両用パネル
4か月前
保線機器整備株式会社
保線用カート
4か月前
カヤバ株式会社
鉄道車両用制振装置
6か月前
近畿車輌株式会社
鉄道車両の床構造
6か月前
株式会社ダイフク
搬送車
1か月前
日本信号株式会社
ホーム安全システム
2か月前
日本信号株式会社
踏切道監視システム
6か月前
日本信号株式会社
物体検知装置
2か月前
ヤマハ発動機株式会社
無人搬送車
2か月前
ヤマハ発動機株式会社
無人搬送車
2か月前
ヤマハ発動機株式会社
無人搬送車
2か月前
前川鉄工株式会社
ロープ駆動装置
7か月前
ヤマハ発動機株式会社
無人搬送車
20日前
株式会社ダイフク
搬送設備
2か月前
シャープ株式会社
表示装置
7か月前
株式会社京三製作所
車上装置
3か月前
ナブテスコ株式会社
ホームドア装置
8か月前
日本製鉄株式会社
鉄道車両
3か月前
日本製鉄株式会社
鉄道車両
4か月前
株式会社 空スペース
跨座式モノレールシステム
5か月前
株式会社ダイフク
走行規制装置
7か月前
富士電機株式会社
制御装置、制御方法
4か月前
日本ケーブル株式会社
チェアリフト搬器の椅子構造
1か月前
日本信号株式会社
信号システム及び信号灯器
5か月前
株式会社京三製作所
情報伝送装置
3か月前
日本信号株式会社
列車無線通信システム
1か月前
日本信号株式会社
車両番号読取システム
5か月前
日本信号株式会社
ホームドア制御システム
1か月前
日本製鉄株式会社
鉄道車両用台車
7か月前
株式会社ダイフク
車両制御システム
7か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ