TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025092342
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2024050249
出願日
2024-03-26
発明の名称
パレタイジング装置のロボットハンド
出願人
YUSHIN株式会社
代理人
弁理士法人西浦特許事務所
主分類
B25J
15/08 20060101AFI20250612BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】被搬送物を段積みするために、隣り合う2つの被搬送物の間に積極的に間隙を開ける必要のないロボットハンドを提供する。
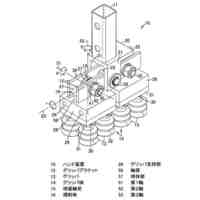
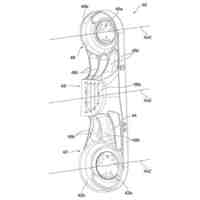
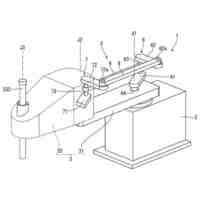
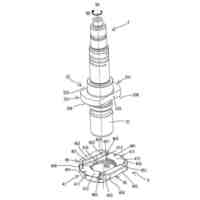
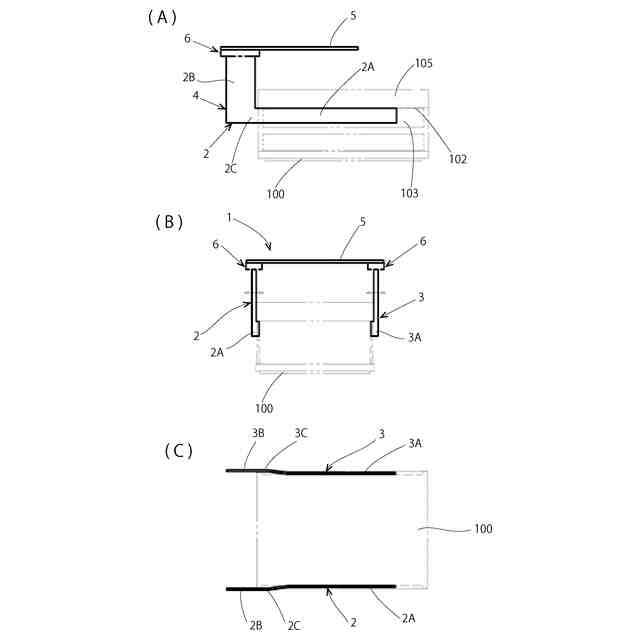
【解決手段】ロボットハンド1の2本のフィンガ2及び3の係合部2A及び2Bは、それぞれコンテナ100の一対の側壁部101に設けた凹部103に嵌合される直線形状を有している。2本のフィンガ2及び3の係合部2A及び2Bに隣接する隣接部分2C及び3Cの傾斜形状は、フローティング機構6が非固定状態に移行してフォーク4がコンテナ100から引き離される方向に移動する際に、隣り合う2つの折り畳み式コンテナの間に形成された隙間からフィンガが引抜可能になるように定められている。
【選択図】図3
特許請求の範囲
【請求項1】
被搬送物を一対以上のフィンガを備えたフォークにより保持して搬送するパレタイジング装置のロボットハンドであって、
前記フォークの前記一対以上のフィンガを保持するフォーク保持部が、前記一対以上のフィンガの間隔を変更して固定する固定状態と前記間隔の変位を自由にする非固定状態に選択的になることができるフローティング機構を有しており、
前記一対以上のフィンガが、それぞれ前記被搬送物と係合する係合部と前記係合部を前記フローティング機構に連結する連結部を備えており、
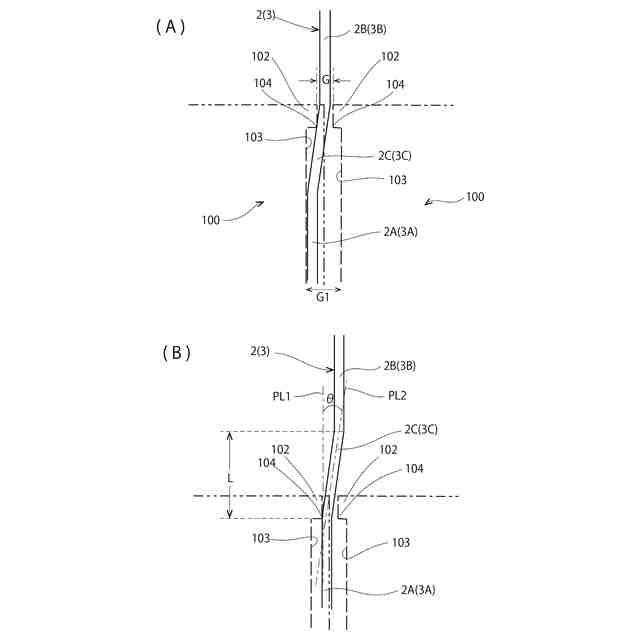
前記一対以上のフィンガのそれぞれの前記連結部の前記係合部に隣接する隣接部分が、前記係合部側から前記連結部に向かうに従って互いに離れる方向に傾斜する傾斜形状を有していることを特徴とするパレタイジング装置のロボットハンド。
続きを表示(約 1,200 文字)
【請求項2】
前記被搬送物が、対向する一対の側壁部の外面に設けられて、外方向に向かって開口する一対の凹部を備えており、
前記一対以上のフィンガの前記係合部が、それぞれ前記凹部に嵌合される直線形状を有しており、
前記フローティング機構が前記非固定状態にあって、前記フォークが前記被搬送物に向かう方向に移動する際に、前記係合部が前記凹部に嵌合されることを許容し、且つ前記係合部が前記凹部に嵌合された状態で前記フローティング機構が前記固定状態になって前記被搬送物が所定位置に搬送された後、前記フローティング機構が前記非固定状態になって前記フォークが前記被搬送物から離される方向に移動する際に、前記係合部が前記凹部から抜け出ることを許容するように、前記隣接部分の傾斜形状及び長さが定められている請求項1に記載のパレタイジング装置のロボットハンド。
【請求項3】
前記被搬送物は、前記凹部の上方に前記側壁部よりも外側に突出する突出部が形成されており、且つ2つの前記被搬送物が前記突出部を近接した状態で並べられる場合に、前記フローティング機構が前記非固定状態に移行して前記フォークが前記被搬送物から引き離される方向に移動する際に、隣り合う2つの前記被搬送物の隣り合う二つの前記側壁部間に形成された隙間から前記一対以上のフィンガが引抜可能になるように、前記一対のフィンガの前記隣接部分の傾斜形状の傾斜角度及び長さが定められている請求項2に記載のパレタイジング装置のロボットハンド。
【請求項4】
前記一対以上のフィンガが水平方向に延びる一対のフィンガからなり、
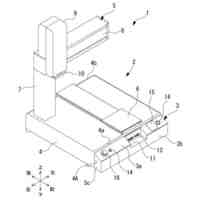
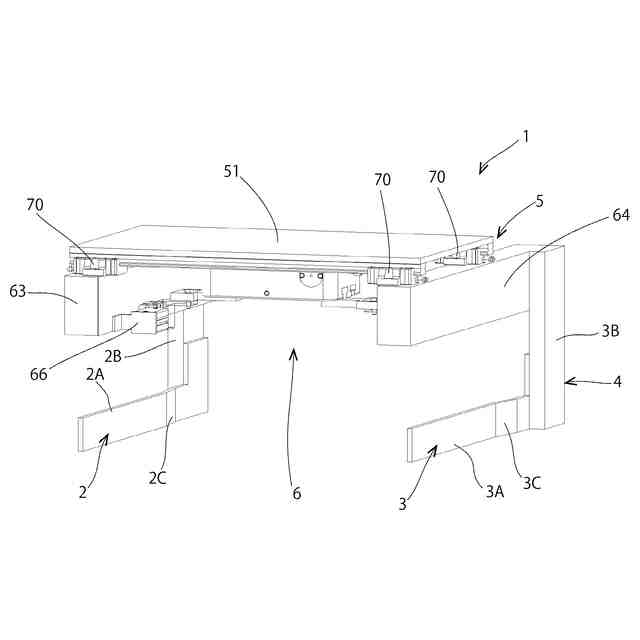
前記フォーク保持部がロボットアームに支持されるベースに前記フローティング機構を備えた構造を有しており、
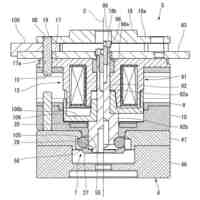
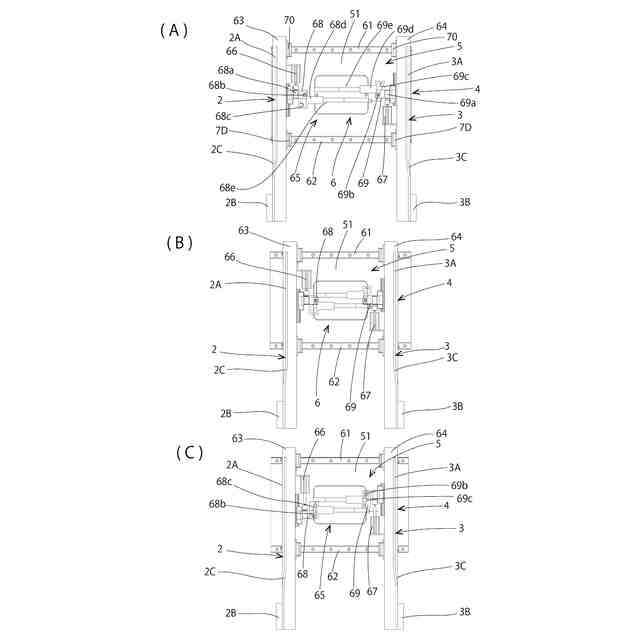
前記フローティング機構は、前記ベースに固定されて並行に延びる一対のガイドレールと、該一対のガイドレールに摺動可能に支持されて前記一対のフォークを備えた一対のフィンガ支持体と、操作指令に応じて前記一対のガイドレールに対して前記一対のフィンガ支持体を摺動させ、且つ前記固定状態と前記非固定状態を選択的に作る駆動機構を備えてなる請求項1乃至3のいずれか1項に記載のパレタイジング装置のロボットハンド。
【請求項5】
請求項1に記載のパレタイジング装置のロボットハンドの使用方法であって、
前記被搬送物が、対向する一対の側壁部の外面に設けられて外方向に向かって開口する一対の凹部を備えている被搬送物であり、
前記一対以上のフィンガのそれぞれの前記係合部を前記一対の凹部に嵌合して前記フローティング機構を前記固定状態にした後、前記被搬送物を所定位置まで搬送して前記被搬送物を前記所定位置に置き、
その後前記フローティング機構を前記非固定状態にして、前記係合部から前記連結部に向かう方向に前記フォークを移動させることにより、前記係合部を前記凹部から引き出すことを特徴とするパレタイジング装置のロボットハンドの使用方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被搬送物をフィンガを備えたフォークにより保持して搬送するパレタイジング装置のロボットハンドに関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
ロボットハンドに吸着装置を設け、吸着装置で被搬送物を吸着して被搬送物を搬送し、被搬送物を段積みする際に吸着装置の吸着を解除するタイプのパレタイジング装置のロボットハンドがある。このタイプのロボットハンドは、被搬送物の重量が軽い場合や、被搬送物の形状が吸着に適している場合には、特に問題はない。しかしながら被搬送物の重量が重くなった場合、被搬送物の形状が吸着に不適な場合には、吸着装置を備えたロボットハンドは使用できない。
【0003】
このような問題に対応するためには、特開2003-159688号公報(特許文献1)の図8に示されるロボットハンドのように、被搬送物(立方体形状の箱)を2本のフィンガを備えたフォークにより保持して搬送するタイプのパレタイジング装置のロボットハンドが使用されることになる。このロボットハンドでは、被搬送物を2本のフィンガで下から支えて搬送する。そして被搬送物を段積みする場合には、下の被搬送物の上の所定の高さ位置からロボットハンドを傾斜させて被搬送物を落下させている。このロボットハンドでは、正確に被搬送物を段積みすることが難しい。
【0004】
また特開2023-170088号公報(特許文献2)には、被搬送物(立方体形状の箱)を2本のフィンガで両側から挟んで段積みするパレタイジング装置のロボットハンドの例が示されている。この公報に記載のロボットハンドでは、2本のフィンガで挟んだ被搬送物を段積みされている被搬送物の上に置いた後、他の被搬送物側に位置する一方のフィンガを上方に上げた状態にして、他方のフィンガで被搬送物を既に置かれる他の被搬送物に向かって押すことにより、二つの搬送物の間の距離を小さくしている。しかしこのロボットハンドでは、2本のフィンガを駆動するための構造が複雑になる。
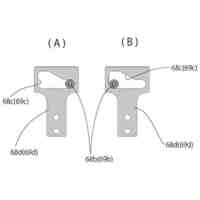
【0005】
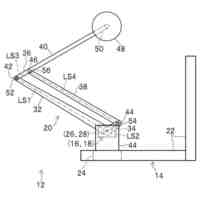
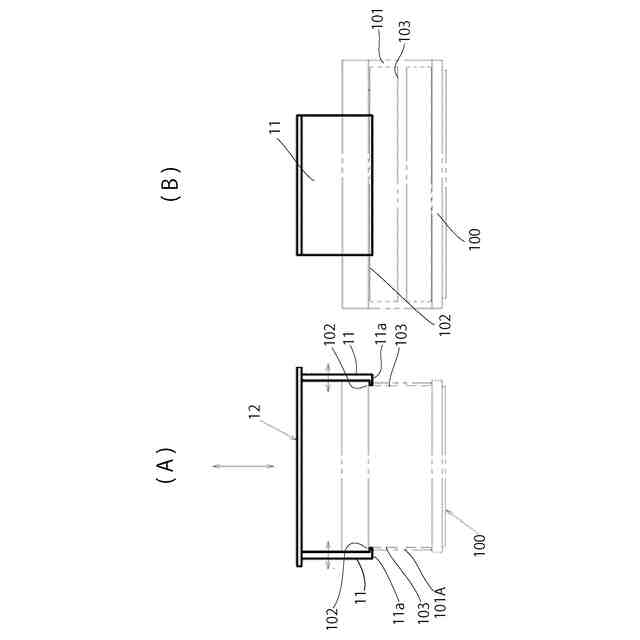
また従来、図7(A)及び(B)に示すように、折り畳み式コンテナ100のように、対向する一対の側壁部101の上端部に直線状に延びる被係合部となる突出部102を備えている被搬送物を搬送する場合には、一対の突出部(被係合部)102と係合する一対の係合部11aを先端に備えた一対の板状のフィンガ11を有するロボットハンド12が提案されている。
【先行技術文献】
【特許文献】
【0006】
特開2003-159688号公報
特開2023-170088号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら図7に示した従来のロボットハンド12では、被搬送物である各コンテナ100を段積みしようとしても、フィンガ11の係合部11aをコンテナ100の突出部(被係合部)102から外すために、フィンガ11を引き抜くための十分な間隙を隣り合う2つのコンテナの間に確保する必要があった。
【0008】
本発明の目的は、被搬送物を段積みするために、隣り合う2つの被搬送物の間に積極的に大きな間隙を開ける必要のないロボットハンドを提供することにある。
【課題を解決するための手段】
【0009】
本発明は、被搬送物を一対以上のフィンガを備えたフォークにより保持して搬送するパレタイジング装置のロボットハンドを対象とする。一対以上のフィンガが、それぞれ被搬送物と係合する係合部と係合部をフローティング機構に連結する連結部を備えており、一対以上のフィンガのそれぞれの連結部の係合部に隣接する隣接部分が、係合部側から連結部に向かうに従って互いに離れる方向に傾斜する傾斜形状を有している。本発明によれば、一対以上のフィンガの隣接部分の傾斜形状の傾斜角度を適宜に定めることにより、係合部が係合される部分の周囲に障害構造が存在していても、傾斜形状の隣接部分が障害構造をスムーズに乗り越えて、隣り合う2つの被搬送物の間からフィンガの係合部を引き抜くことが可能になる。
【0010】
被搬送物が、対向する一対の側壁部の外面に設けられて、外方向に向かって開口する一対の凹部を備えた被搬送物の場合には、一対以上のフィンガの係合部は、それぞれ凹部に嵌合される直線形状を有しているのが好ましい。そして一対以上のフィンガのそれぞれの連結部の係合部に隣接する隣接部分の傾斜形状は、フローティング機構が非固定状態にあってフォークが被搬送物に向かう方向に移動する際に係合部が凹部に嵌合されることを許容し、且つ係合部が凹部に嵌合された状態でフローティング機構が固定状態になって被搬送物が所定位置に搬送された後、フローティング機構が非固定状態に移行してフォークが被搬送物から離される方向に移動する際に、係合部が凹部から抜け出ることを許容するように定められているのが好ましい。このようにすると凹部の周囲に存在する角部分が障害構造になっていても、フィンガの隣接部分の傾斜がガイドとなって、係合部が角部分をスムーズに乗り越える。そのためロボットハンドの引抜をスムーズに行える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
YUSHIN株式会社
パレタイジング装置のロボットハンド
5日前
日東精工株式会社
電動ドライバ
22日前
株式会社ダイヘン
移動体
25日前
トヨタ自動車株式会社
関節機構
27日前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
21日前
工機ホールディングス株式会社
作業機
13日前
学校法人五島育英会
アーム機構
27日前
工機ホールディングス株式会社
作業機
13日前
株式会社スター精機
吸着パッド
21日前
工機ホールディングス株式会社
作業機
13日前
株式会社アイエイアイ
グリッパー
1か月前
庄内機械株式会社
釘打装置
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
19日前
オークラ輸送機株式会社
ハンド装置
6日前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社リコー
多関節ロボット
26日前
川崎重工業株式会社
ロボットシステム
7日前
株式会社マキタ
電動作業機
28日前
株式会社マキタ
電動作業機
28日前
株式会社安川電機
ロボット
19日前
株式会社ダイヘン
ロボット制御システム
25日前
株式会社ジャノメ
ロボット
15日前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
小倉クラッチ株式会社
ロボット用ツール交換装置
21日前
セイコーエプソン株式会社
ロボット
1日前
セイコーエプソン株式会社
ロボット
21日前
個人
回転移動式工具ホルダ
1か月前
株式会社マキタ
電動工具
5日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
回転工具
8日前
オムロン株式会社
撮影システム
21日前
オムロン株式会社
ロボット
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ