TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086561
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023200621
出願日
2023-11-28
発明の名称
ロボット
出願人
株式会社ジャノメ
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
19/00 20060101AFI20250602BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
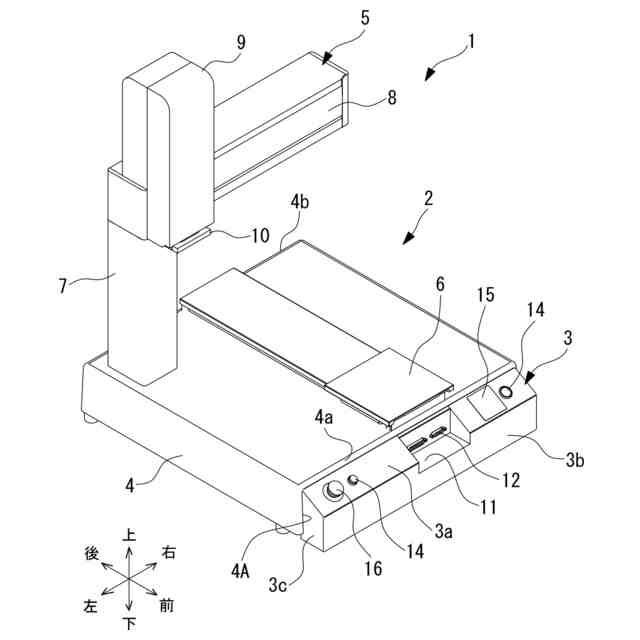
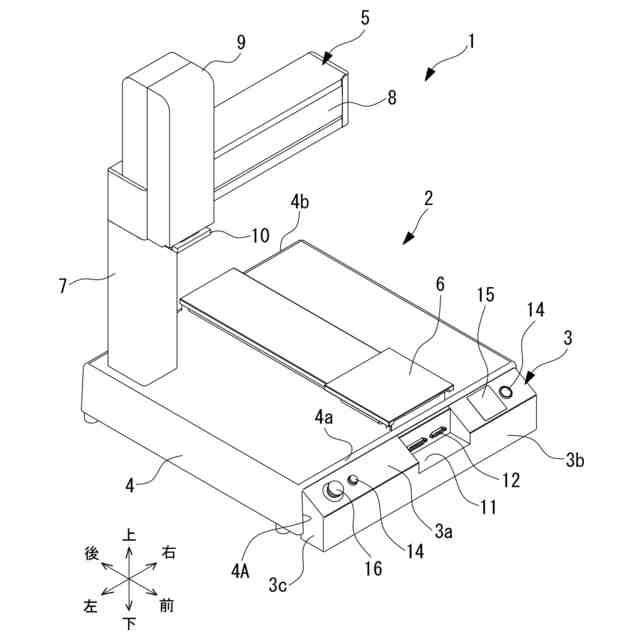
【課題】操作装置のケーブルのコネクタシェルが本体部に接続された状態で、コネクタシェルの突出量を低減することが可能な卓上ロボットを提供すること。
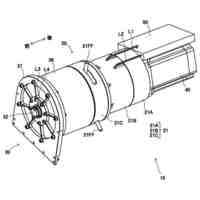
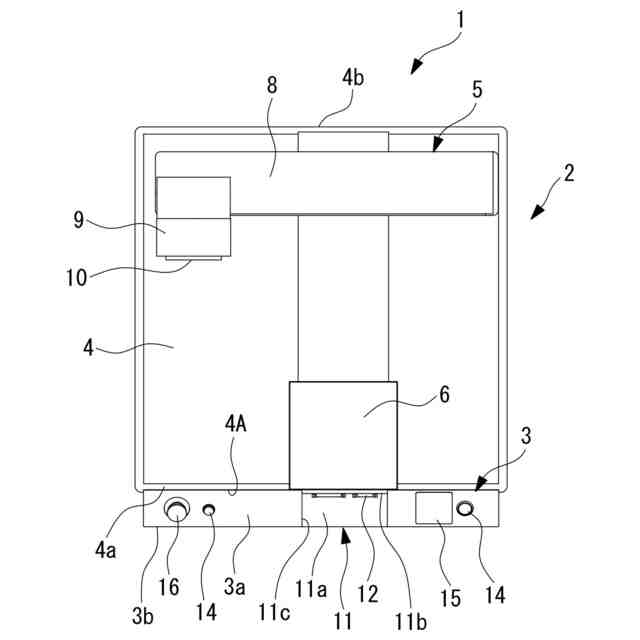
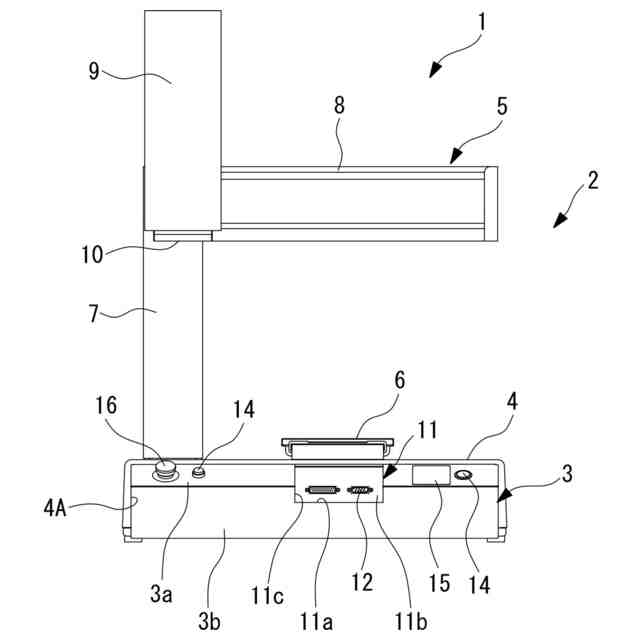
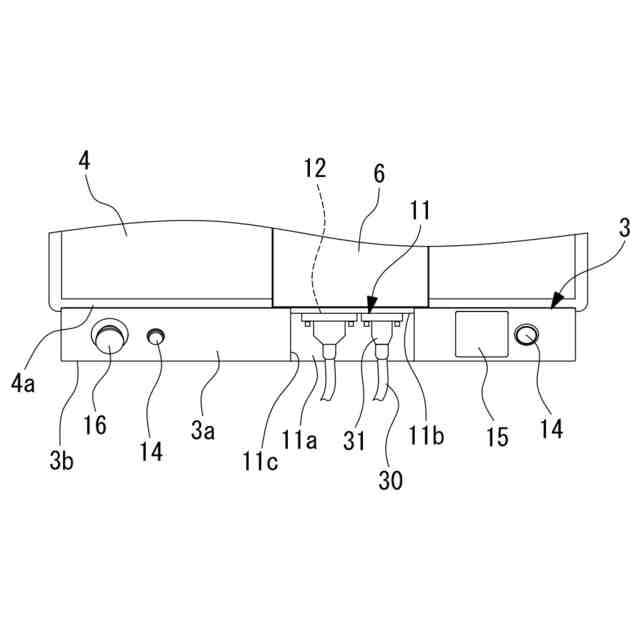
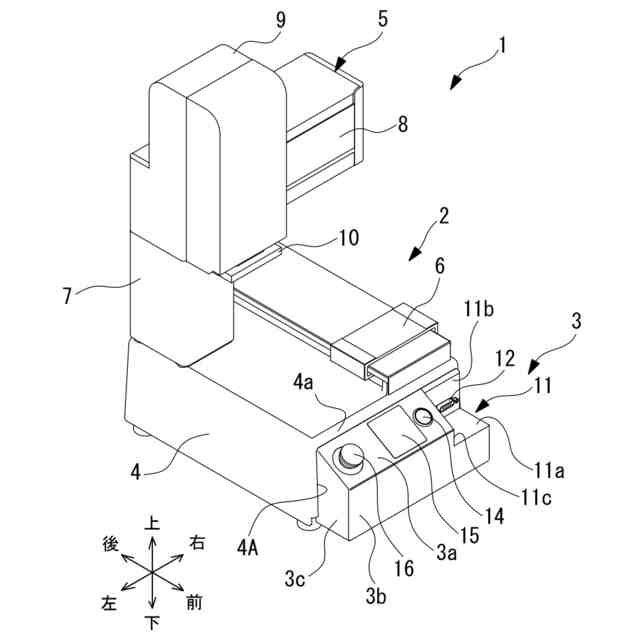
【解決手段】卓上ロボット1は、内側に向けて本体部2に凹状に形成され、本体部2に設置されるツールを操作するための操作装置に接続可能なコネクタ12が設置された凹部11を備え、凹部11において、本体部2の端部からコネクタ12までの長さが、操作装置のケーブルのコネクタシェルの長さ以上である。
【選択図】図1
特許請求の範囲
【請求項1】
内側に向けて本体部に凹状に形成され、前記本体部に設置されるツールを操作するための操作装置に接続可能な本体側コネクタが設置された凹部を備え、
前記凹部において、前記本体部の端部から前記本体側コネクタまでの長さが、前記操作装置のケーブルのコネクタシェルの長さ以上であるロボット。
続きを表示(約 170 文字)
【請求項2】
前記本体部に配設され、ワークが設置可能であるワーク設置部を更に備え、
前記凹部は、前記ワーク設置部側に開放されている請求項1に記載のロボット。
【請求項3】
前記ワーク設置部は、前記本体部において軸方向に移動可能であり、
前記凹部は、前記軸方向に沿って形成されている請求項2に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
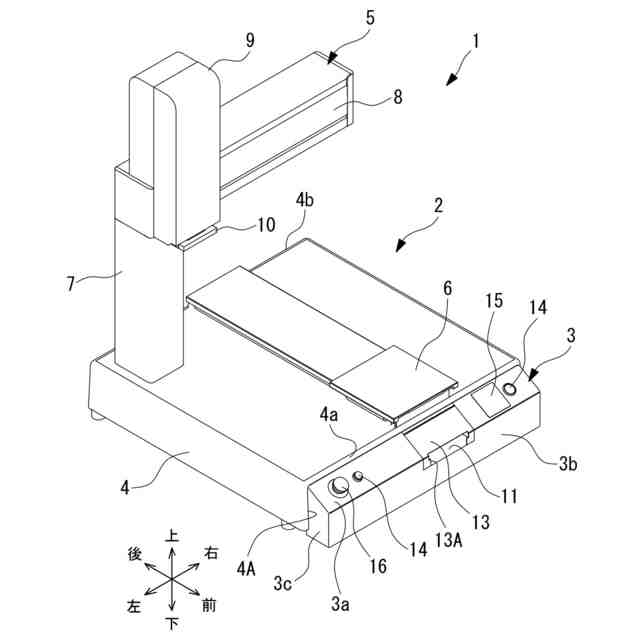
卓上ロボットは、ロボットの一例であり、X方向、Y方向、Z方向の3方向の直動機構を有し、直動機構によってツールがワークに対して相対的に3次元に移動可能である。卓上ロボットは、取り付けられたツールの種類に応じて、ワーク同士の組み立て、ワークに対する接着剤などの塗布、ねじ締め、ハンダ付け、ワークの切断などの作業を行う。
【0003】
卓上ロボットがいわゆる半自動機として利用される場合、作業者は、卓上ロボットの近くで作業する場合があり、作業者によって加工前のワークがロボット本体部に設置されたり、加工後のワークがロボット本体部から取り外されたりする。また、卓上ロボットには、前面パネルにON/OFFスイッチ、動作切換スイッチや表示部が設置されており、作業者によって前面パネルで操作が行われる場合がある。
【0004】
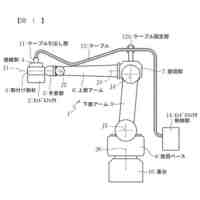
下記の特許文献1には、操作部がロボット本体部に対してケーブルによって電気的に接続され、操作部がロボット本体部に対して着脱可能であることが開示されている。操作部には、操作スイッチや発光部、非常停止ボタンが設けられる。
【先行技術文献】
【特許文献】
【0005】
特開2022-140915号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
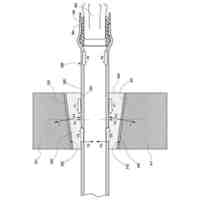
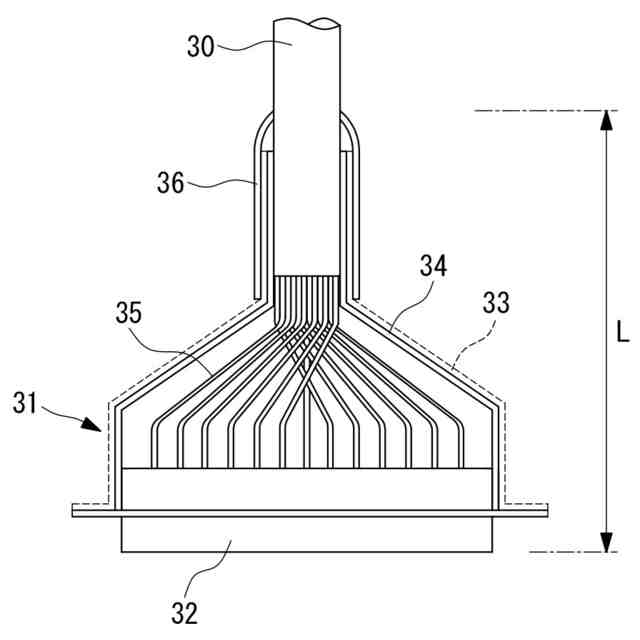
卓上ロボットに対して操作装置(例えばリモコン等の操作部や表示部、ティーチングペンダントなど)がケーブルによって接続可能とされる場合、卓上ロボットの前面や側面、背面などにケーブル接続用の本体側コネクタが設けられる。そして、ケーブル先端においてもコネクタが設けられており、ケーブル先端のコネクタは、金属製又はプラスチック製のコネクタシェルによって覆われている。
【0007】
卓上ロボットの前面に本体側コネクタが設けられて、ケーブルが接続される場合、ケーブル先端のコネクタシェルが卓上ロボットの前面から突出した状態で固定される。したがって、卓上ロボットが作業台に設置されているとき、卓上ロボットの最前面が作業台の端部に近い位置にある場合、コネクタシェルとケーブルが作業台の端部よりも外側に位置することがある。
【0008】
この状態では、作業者がコネクタシェルの存在に気が付かずにコネクタシェルと接触することがあり、作業者の負傷やコネクタ損傷のおそれがある。また、コネクタシェルやケーブルが作業台よりも外側に位置しないように、卓上ロボットを作業台の奥方向に設置すると、作業台の有効スペースが減少してしまう。
【0009】
本発明は、このような事情に鑑みてなされたものであって、操作装置のケーブルのコネクタシェルが本体部に接続された状態で、コネクタシェルの突出量を低減することが可能なロボットを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明のロボットは以下の手段を採用する。
すなわち、本発明に係るロボットは、内側に向けて本体部に凹状に形成され、前記本体部に設置されるツールを操作するための操作装置に接続可能な本体側コネクタが設置された凹部を備え、前記凹部において、前記本体部の端部から前記本体側コネクタまでの長さが、前記操作装置のケーブルのコネクタシェルの長さ以上である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ジャノメ
ロボット
28日前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
28日前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
25日前
川崎重工業株式会社
ロボット
26日前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
25日前
株式会社スター精機
吸着パッド
2か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
株式会社スター精機
産業用ロボット
2か月前
株式会社マキタ
電気機器
26日前
ホシデン株式会社
分解用治具
1か月前
アピュアン株式会社
衝撃工具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社マキタ
電動作業機
2か月前
工機ホールディングス株式会社
作業機
28日前
株式会社リコー
多関節ロボット
2か月前
株式会社マキタ
電動作業機
2か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
28日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社不二越
協働ロボットシステム
3日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ