TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093530
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209237
出願日
2023-12-12
発明の名称
施設内で検出された音響データを処理する装置、方法、およびプログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
G05B
23/02 20060101AFI20250617BHJP(制御;調整)
要約
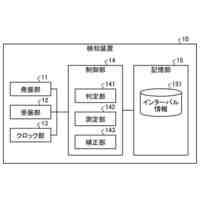
【課題】施設内で検出された音響データを処理して、施設内における異常が存在しうる異常エリアを特定する装置を提供する。
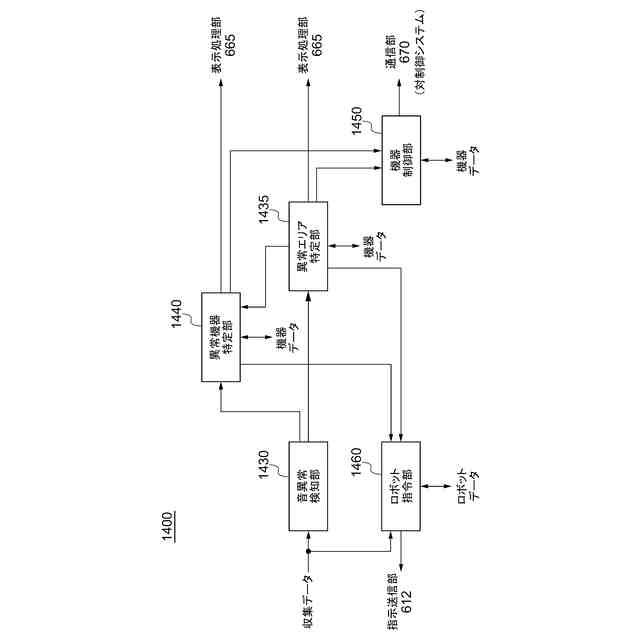
【解決手段】施設内の複数の第1位置のそれぞれにおいて施設内を移動して集音を行うことができるロボットにより検出された第1音響データを取得する音響データ取得部と、複数の第1位置のそれぞれにおいて検出された第1音響データを用いて、各第1位置における音の異常度を検知する音異常検知部と、複数の第1位置のそれぞれにおいて検出された音の異常度に基づいて、施設内における異常が存在しうる異常エリアを特定する異常エリア特定部とを備える。
【選択図】図14
特許請求の範囲
【請求項1】
施設内の複数の第1位置のそれぞれにおいて前記施設内を移動して集音を行うことができるロボットにより検出された第1音響データを取得する音響データ取得部と、
前記複数の第1位置のそれぞれにおいて検出された前記第1音響データを用いて、各第1位置における音の異常度を検知する音異常検知部と、
前記複数の第1位置のそれぞれにおいて検出された音の異常度に基づいて、前記施設内における異常が存在しうる異常エリアを特定する異常エリア特定部と
を備える装置。
続きを表示(約 1,200 文字)
【請求項2】
前記ロボットは、GPSを備え、
前記音響データ取得部は、前記ロボットから、GPSに基づく前記ロボットの位置を示す位置データに対応付けられた前記第1音響データを取得する請求項1に記載の装置。
【請求項3】
第1の前記ロボットが集音した前記第1音響データを用いて検知した前記異常度が閾値を超えたことに応じて、第2の前記ロボットに対して、前記第1のロボットに近付いて集音することを指示するロボット指令部を備える請求項1に記載の装置。
【請求項4】
前記ロボット指令部は、前記第1のロボットが集音した前記第1音響データを用いて検知した前記異常度が閾値を超えたことに応じて、前記第2のロボットに対して、前記第1のロボットから予め定められた範囲内へと移動して集音することを指示する請求項3に記載の装置。
【請求項5】
前記ロボット指令部は、前記第1のロボットが集音した前記第1音響データにおける異常を示す音成分の大きさに応じて前記予め定められた範囲の大きさを調整する請求項4に記載の装置。
【請求項6】
前記異常エリア特定部は、前記複数の第1位置のうち前記第1音響データを用いて検出した前記異常度が閾値を超える2以上の第1位置のそれぞれに対する距離を用いて、前記施設内における異常が発生した箇所が存在しうる前記異常エリアを特定する請求項1から5のいずれか一項に記載の装置。
【請求項7】
前記異常エリア特定部は、前記2以上の第1位置のそれぞれに対する距離の範囲を、集音を行う音響センサの感度、前記音響センサの指向性、または前記異常度に応じて調整する請求項6に記載の装置。
【請求項8】
前記異常エリア特定部は、前記複数の第1位置のそれぞれにおける、異常を示す音成分の方向に基づいて、前記異常エリア、または前記施設内における異常が発生した機器を特定する請求項1に記載の装置。
【請求項9】
前記異常エリア特定部は、前記複数の第1位置のそれぞれから異常を示す音成分の方向へと向かう線が交差する位置を含むエリアまたは当該位置に設けられた機器を、前記異常エリア、または前記施設内における異常が発生した機器として特定する請求項1に記載の装置。
【請求項10】
前記音響データ取得部は、特定された前記異常エリア内の複数の第2位置のそれぞれにおいて検出された第2音響データを取得し、
前記音異常検知部は、前記複数の第2位置のそれぞれにおいて検出された前記第2音響データを用いて、各第2位置における音の異常度を検知し、
前記複数の第2位置のそれぞれにおいて検出された音の異常度に基づいて、前記施設内における異常が発生した機器を特定する異常機器特定部を備える
請求項1に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、施設内で検出された音響データを処理する装置、方法、およびプログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、「図1に示す点検支援システム1は、点検現場2から遠隔にある監視場所3で点検員4が点検現場2の機器を点検可能にする」こと(段落0010)、「無人移動体10からの音の情報には、複数のマイク131~13mで各々取得された音の情報が含まれており、音判定部72は、これらの音の情報に基づいて、音源方向、音源位置、および音の大きさを判定することができる」こと(段落0037)、「図形付加部73は、音判定部72による判定結果に基づいて、無人移動体10から取得した撮像画像に、音源の位置を表す図形および音の大きさを表す図形のうち少なくとも一つを表す図形を付加する」こと(段落0038)が記載されている。
【0003】
特許文献2には、「マイクをフィールド内に複数設け、このマイクから集音された音響データを分析することで、異常の発生と異常の発生位置、内容を自動的に判断することができる」こと(段落0026)、「抽出した三つのマイク622から音源までの距離を判断する。音響データの波形の振幅変化率は、新たな音源からマイク622までの距離に反比例すると判断できるから、この比率に応じて、三つのマイク622からの距離R1,R2,R3を設定する。そして、各マイク622を中心に、距離R1,R2,R3を半径とする円(領域A,B,C)を描くと、その交点の中心に、音源が位置していると判断することができる」こと(段落0049)が記載されている。
【0004】
特許文献3には、「複数のエリアに分割された指向性を有する収音面を有し、エリア毎に、当該エリアの前方から収音する」(段落0013)、「不具合兆候発生位置特定部45は、収音装置31~33のそれぞれについて、収音面31を構成する各エリア32の2次元座標情報(収音装置31では(z、x)、収音装置32では(y、z)、そして、収音装置33では(x、y))を示すエリアマップTL4511~4513(以下、単にエリアマップ451とも呼ぶ)を有している」(段落0027)と記載されている。
【0005】
特許文献4には、「本実施形態では、後述のように、無線子局10にマイク11を設け、一定時間ごとにマイク11を起動させ、点検対象設備2の稼動音を収集させる。無線子局10は、収集した稼動音データを解析し、点検対象設備2の状態を示す第1判定結果として、データ収集装置30へ向けて送信する。データ収集装置30は、第1判定結果が異常である場合には、他の所定の無線子局10から取得された他の第1判定結果と照合する。他の所定の無線子局10の他の第1判定結果も異常を示す場合には、判定対象無線子局からの第1判定結果は、点検対象設備2の周囲の環境の音(以下、環境音)による誤検出と判断することができる」(段落0012)と記載されている。
【0006】
特許文献5には、「図において、被監視対象1には位置信号発信装置1.1が取付けられ被監視対象1と別に建屋等に位置信号発信装置1.2が取付けられている。そして、位置信号発信装置1.1と位置信号発信装置1.2と被監視対象1の発信音状態を入力する複数個の集音センサ20が被監視対象1から離れて配置されている」(段落0023)、「位置解析処理手段22は、集音センサ20により取込まれる振動音から位置特定信号のみを抽出して集音センサ20と位置信号発信装置1.1と位置発信装置1.2との位置関係を特定する実際の位置関係データを作成する。音声データ解析処理手段21は、集音センサ20から取込まれた振動音と位置解析手段22により作成された実際の位置関係データとに基づいて被監視対象1の各部所に対応付けた振動音データを作成し、作成された振動音データから被監視対象1の振動音分布を解析して振動音分布データを作成する」(段落0025)と記載されている。
【0007】
特許文献6には、「場合によっては、コンピューティング装置200は、音響シグネチャ166内の異常音を発生させる、産業プラント152内の未知の構成要素102、104、110、126、128を特定するために、その音響シグネチャ166の分析と他のデータの位置分析とを組み合わせてもよい」(段落0024)、「1つ以上の音響センサ164が方向感知型の場合(例えば、1つ以上の指向性マイクロフォンをその中に含むことによって)、コンピューティング装置200はさらに、各音響センサ164の指向性および/または感度に基づいて、音響シグネチャ166に対応する構成要素102、104、110、126、128を突き止め、および/または特定してもよい」(段落0024)と記載されている。
【0008】
特許文献7には、「図11に示すように、第1の音響センサまたは振動センサ311を二次元センサのパン・チルトの動きの固定点に、第2の音響センサまたは振動センサ312を二次元センサのカメラ軸上に設置する。第3~第5の音響センサ313、314、315または振動センサは図10の関係を保って図11上に設置する」(段落0141)、「これによって、二次元センサ2の観測点方向であるカメラ軸方向を音響センサまたは振動センサのX軸方向とした相対的な位置関係が成立する。先に作用を説明したとおり、複数の音響センサまたは振動センサから音響源または振動源の位置を推定できるので二次元センサの観測点からの相対的な音響源または振動源の位置を求めることができる」(段落0142)と記載されている。
[先行技術文献]
[特許文献]
[特許文献1] 特開2020-149349号公報
[特許文献2] 特開2005-4367号公報
[特許文献3] 特開2005-215833号公報
[特許文献4] 特開2020-71651号公報
[特許文献5] 特開平10-132651号公報
[特許文献6] 特開2018-10632号公報
[特許文献7] 特開平11-85257号公報
【発明の概要】
【0009】
本発明の第1の態様においては、施設内の複数の第1位置のそれぞれにおいて前記施設内を移動して集音を行うことができるロボットにより検出された第1音響データを取得する音響データ取得部と、前記複数の第1位置のそれぞれにおいて検出された前記第1音響データを用いて、各第1位置における音の異常度を検知する音異常検知部と、前記複数の第1位置のそれぞれにおいて検出された音の異常度に基づいて、前記施設内における異常が存在しうる異常エリアを特定する異常エリア特定部とを備える装置を提供する。
【0010】
上記の装置において、前記ロボットは、GPSを備えてよく、前記音響データ取得部は、前記ロボットから、GPSに基づく前記ロボットの位置を示す位置データに対応付けられた前記第1音響データを取得してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
プラント運転支援装置
2日前
横河電機株式会社
装置、方法およびプログラム
2日前
横河電機株式会社
分光分析装置及び分光分析方法
8日前
横河電機株式会社
分析装置、分析方法および分析プログラム
4日前
横河電機株式会社
検知装置、時刻同期方法、時刻同期プログラム、及び検知システム
10日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
3日前
株式会社FUJI
工作機械
3日前
エイブリック株式会社
基準電圧回路
2か月前
株式会社ダイヘン
移動体
8日前
ローム株式会社
半導体集積回路
18日前
トヨタ自動車株式会社
ペダル機構
1か月前
三栄ハイテックス株式会社
基準電圧回路
21日前
株式会社ダイフク
搬送設備
3日前
株式会社ダイフク
搬送設備
1か月前
エイブリック株式会社
ボルテージレギュレータ
2か月前
株式会社鷺宮製作所
制御装置
2日前
株式会社オプトン
制御プログラム生成装置
1日前
トヨタ自動車株式会社
工作機械の制御装置
2か月前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社ダイヘン
負荷時タップ切換器
8日前
株式会社ダイフク
物品搬送設備
17日前
株式会社ダイフク
物品搬送設備
1日前
株式会社やまびこ
走行制御装置
2か月前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
1日前
株式会社タブチ
減圧弁
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
14日前
WHILL株式会社
電動モビリティ
1か月前
株式会社計数技研
移動体、及びプログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ