TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094495
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210063
出願日
2023-12-13
発明の名称
作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
E02F
3/43 20060101AFI20250618BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレータの操作の手間を低減可能な、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供する。
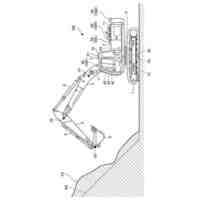
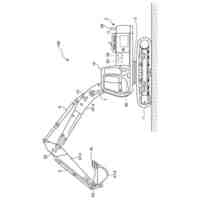
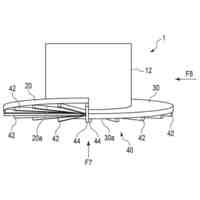
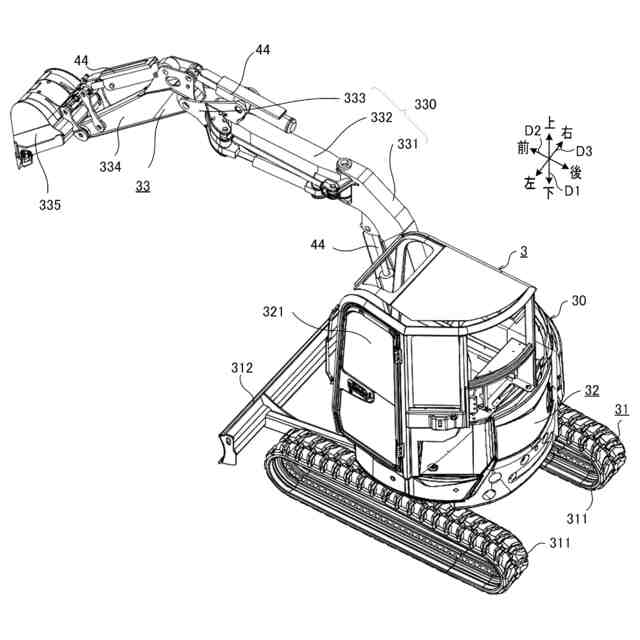
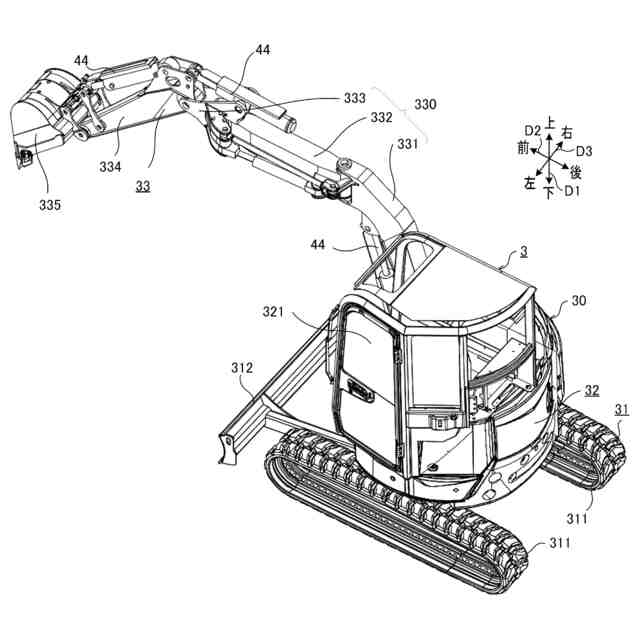
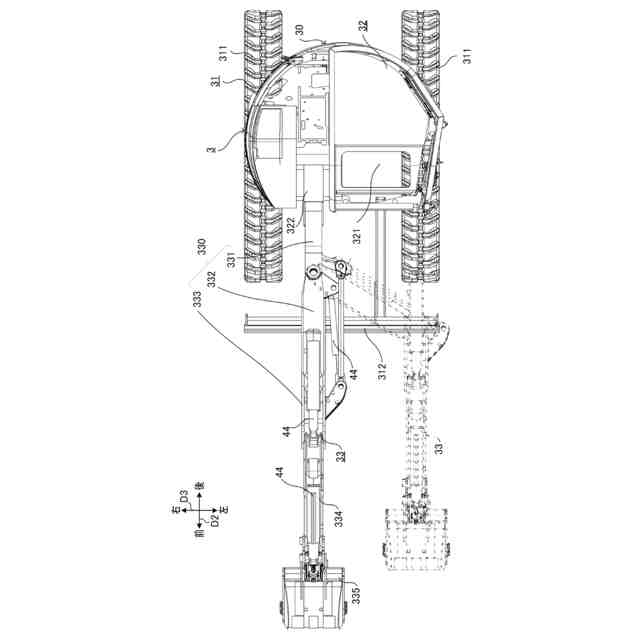
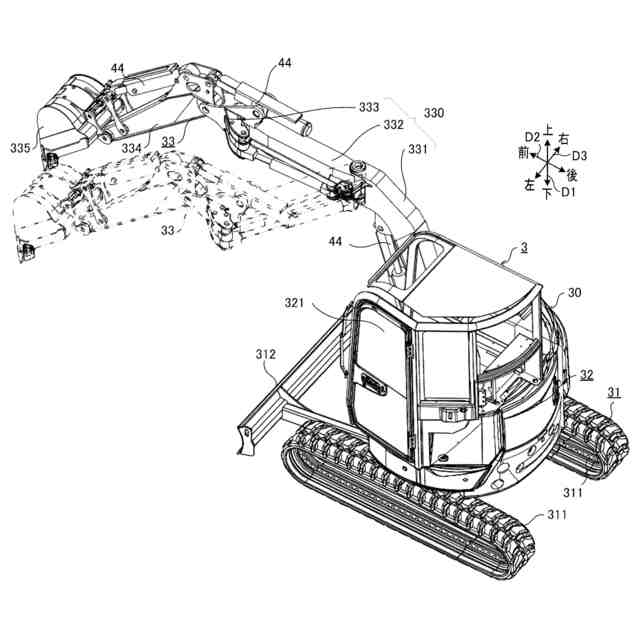
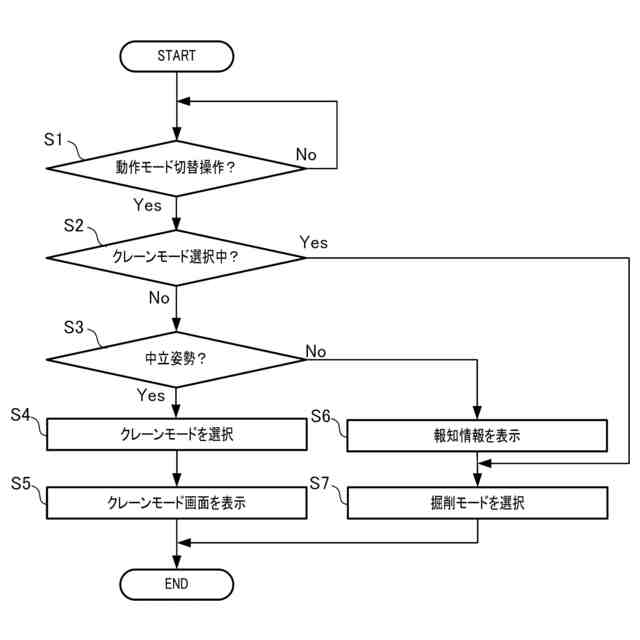
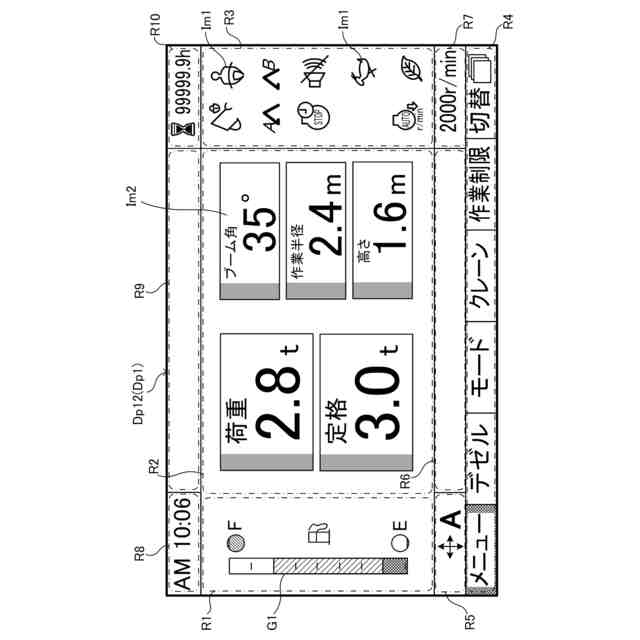
【解決手段】作業機械3の制御方法は、作業を実行可能に構成された作業部33を備える作業機械3に用いられる。作業機械3の制御方法は、中立姿勢及びオフセット姿勢を含む複数の姿勢間で作業部33の姿勢を変更することと、作業部33の姿勢が中立姿勢にある状態で、作業部33の特定動作を許容することと、作業部33の姿勢がオフセット姿勢にある状態で、作業部33の特定動作を禁止することと、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
作業を実行可能に構成された作業部を備える作業機械に用いられ、
中立姿勢及びオフセット姿勢を含む複数の姿勢間で前記作業部の姿勢を変更することと、
前記作業部の姿勢が前記中立姿勢にある状態で、前記作業部の特定動作を許容することと、
前記作業部の姿勢が前記オフセット姿勢にある状態で、前記作業部の前記特定動作を禁止することと、を有する、
作業機械の制御方法。
続きを表示(約 1,000 文字)
【請求項2】
前記作業部の前記特定動作中にあっては、前記作業部の姿勢について前記中立姿勢から前記オフセット姿勢への移行を禁止する、
請求項1に記載の作業機械の制御方法。
【請求項3】
前記作業部の前記特定動作中において、前記作業部の姿勢が前記中立姿勢から前記オフセット姿勢に移行すると、前記作業部の前記特定動作を中止する、
請求項1に記載の作業機械の制御方法。
【請求項4】
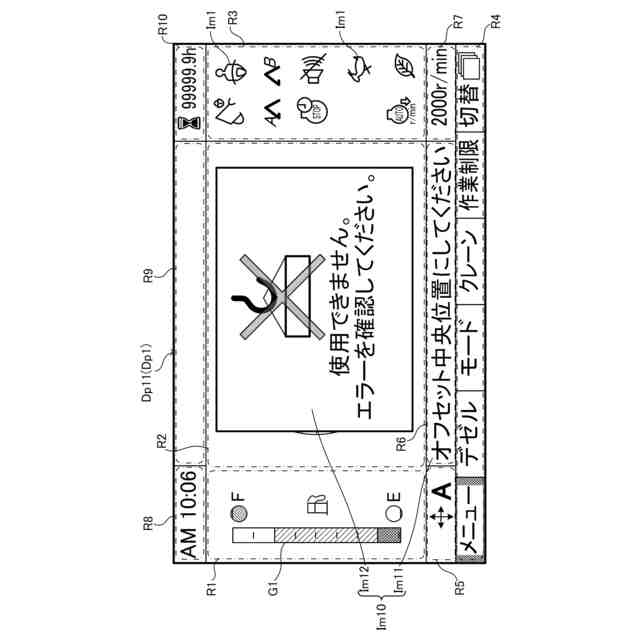
前記作業部の姿勢が前記オフセット姿勢にある状態で前記作業部の前記特定動作を禁止する場合に、報知情報を提示すること、を更に有する、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項5】
前記報知情報は、少なくとも前記特定動作に関する情報を含む、
請求項4に記載の作業機械の制御方法。
【請求項6】
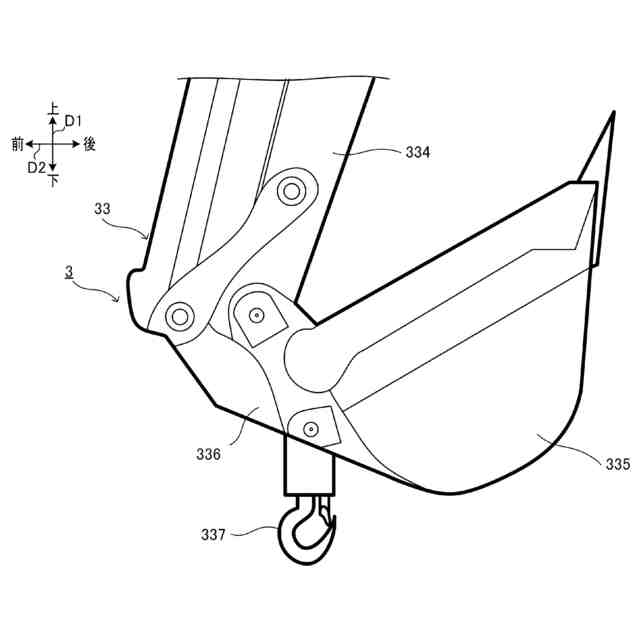
前記特定動作は、前記作業部に吊り作業を実行させるクレーンモードにおける前記作業機械の動作を含む、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項7】
前記特定動作は、前記作業部の可動範囲を制限位置までに制限する制限モードにおいて使用する前記制限位置を登録する動作を含む、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項8】
前記制限位置が登録済みである場合の前記制限モードにおける前記作業部の動作は前記特定動作に含まない、
請求項7に記載の作業機械の制御方法。
【請求項9】
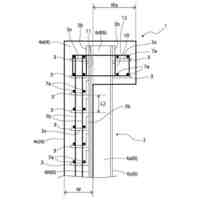
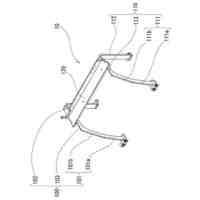
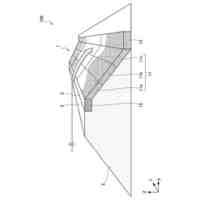
前記作業部は、互いに連結された第1ブームと第2ブームとを含み、平面視において前記第1ブームに対する前記第2ブームの角度を変更可能なブームを有し、
前記作業部の姿勢は、前記第1ブームに対する前記第2ブームの角度によって変化し、
前記中立姿勢は、前記角度が中立範囲内にあるときの前記作業部の姿勢であって、
前記オフセット姿勢は、前記角度がオフセット範囲内にあるときの前記作業部の姿勢である、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項10】
前記中立範囲と前記オフセット範囲との境界を設定可能である、
請求項9に記載の作業機械の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業を実行可能に構成された作業部を備える作業機械に用いられる、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
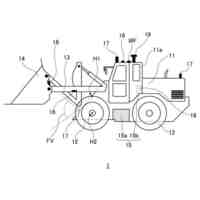
関連技術として、フロント装置の先端に荷重を吊り下げ支持するクレーンモード(クレーン作業モード)を有する作業機械(バックホウ)が知られている(例えば、特許文献1参照)。この作業機械は、ブームを、オフセットシリンダによって一対の関節支点を介して平行に横折れ駆動するよう構成され、フロント装置を運転部の右横に小さく折込んで小半径で旋回することができる、いわゆる超小旋回型の作業機械である。この作業機械では、吊り下げ半径と吊り下げ荷重との検出に基づいて、吊り下げ荷重によって機体が転倒するのを回避するためクレーン作業用制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2002-206252号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記関連技術では、オフセット姿勢にあると、吊り下げの荷重の検出精度が低下し、また、そもそも作業機械全体として安定しにくい状態にあることから、オフセット姿勢での吊り作業は推奨されない。しかしながらオフセット姿勢での吊り作業を回避するためには、吊り作業を行うためのクレーンモードを起動する度に、オペレータが、オフセット姿勢にないことを確認する必要があり、オペレータの操作の手間が掛かるという問題がある。
【0005】
本発明の目的は、オペレータの操作の手間を低減可能な、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械の制御方法は、作業を実行可能に構成された作業部を備える作業機械に用いられる。前記作業機械の制御方法は、中立姿勢及びオフセット姿勢を含む複数の姿勢間で前記作業部の姿勢を変更することと、前記作業部の姿勢が前記中立姿勢にある状態で、前記作業部の特定動作を許容することと、前記作業部の姿勢が前記オフセット姿勢にある状態で、前記作業部の前記特定動作を禁止することと、を有する。
【0007】
本発明の一態様に係る作業機械用制御プログラムは、前記作業機械の制御方法を、1以上のプロセッサに実行させるためのプログラムである。
【0008】
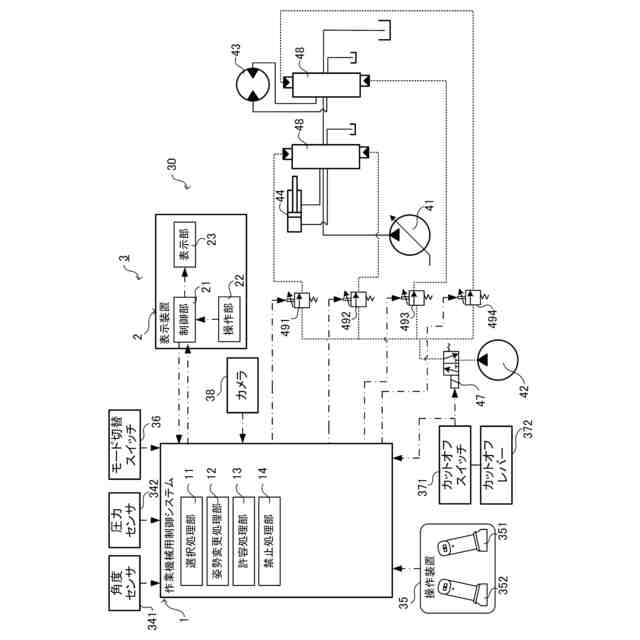
本発明の一態様に係る作業機械用制御システムは、作業を実行可能に構成された作業部を備える作業機械に用いられ、姿勢変更処理部と、許容処理部と、禁止処理部と、を備える。前記姿勢変更処理部は、中立姿勢及びオフセット姿勢を含む複数の姿勢間で前記作業部の姿勢を変更する。前記許容処理部は、前記作業部の姿勢が前記中立姿勢にある状態で、前記作業部の特定動作を許容する。前記禁止処理部は、前記作業部の姿勢が前記オフセット姿勢にある状態で、前記作業部の前記特定動作を禁止する。
【0009】
本発明の一態様に係る作業機械は、前記作業機械用制御システムと、前記作業部と、を備える。
【発明の効果】
【0010】
本発明によれば、オペレータの操作の手間を低減可能な、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
FKS株式会社
擁壁
6日前
株式会社forch
土採取装置
7日前
鹿島建設株式会社
基礎構造
今日
株式会社富田製作所
継手部構造
今日
株式会社大林組
作業機械
21日前
株式会社竹中工務店
杭基礎構造
14日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
13日前
株式会社竹中工務店
建物の基礎構造
19日前
住友建機株式会社
電動ショベル
12日前
日立建機株式会社
建設機械
今日
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
日立建機株式会社
作業機械
12日前
株式会社テノックス九州
地盤改良方法
12日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
今日
エバタ株式会社
下水道施設の再構築方法
5日前
ナブテスコ株式会社
ショベルカー
12日前
住友重機械工業株式会社
ショベル
6日前
株式会社大林組
山留め工事の支援方法
19日前
大成建設株式会社
杭基礎構造
6日前
日鉄建材株式会社
カゴ枠、及び河川堤防の補強構造
13日前
日立建機株式会社
作業車両
5日前
日立建機株式会社
作業機械
5日前
株式会社大林組
基礎梁の再利用方法及び建築物
8日前
ジャパンパイル株式会社
杭
8日前
大和ハウス工業株式会社
補強用鉄筋籠および作製方法
5日前
株式会社ジオベクトル
補強土壁工法
7日前
住友建機株式会社
ショベル及びショベルの制御装置
13日前
JFE建材株式会社
土留パネル
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ