TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025108605
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2025067424,2021036624
出願日
2025-04-16,2021-03-08
発明の名称
処理装置、移動体、処理方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
7/70 20170101AFI20250715BHJP(計算;計数)
要約
【課題】処理負荷を軽減しつつ、精度よく物標を特定すること。
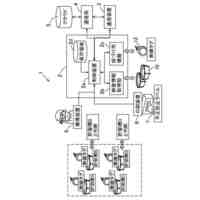
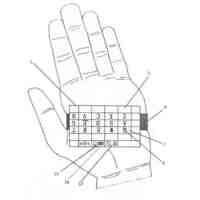
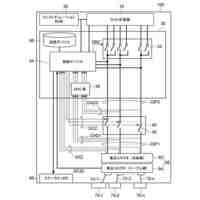
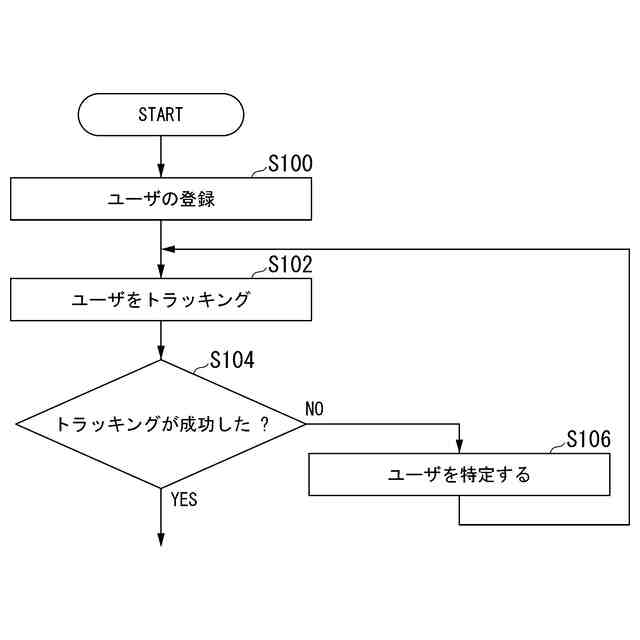
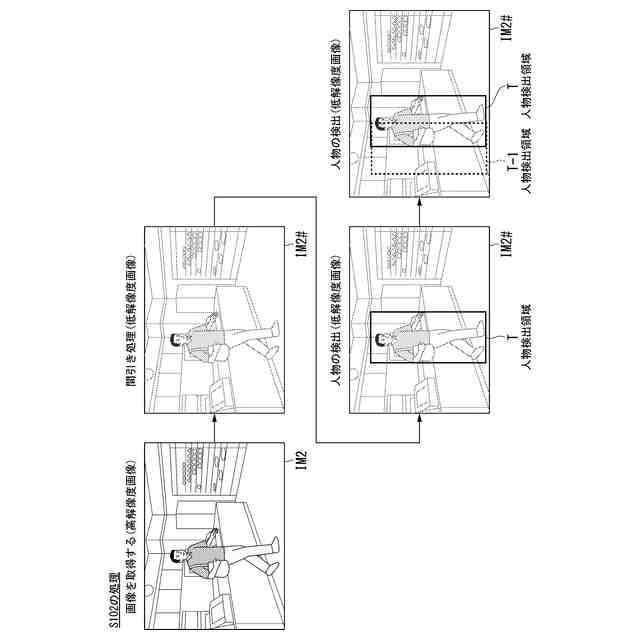
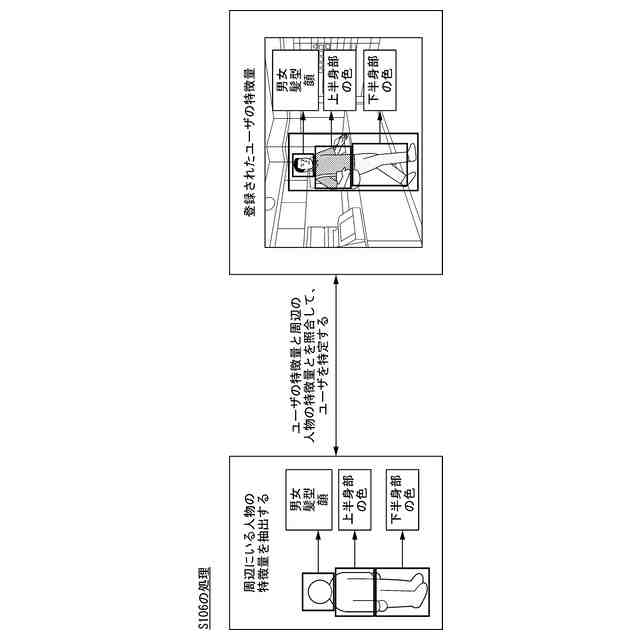
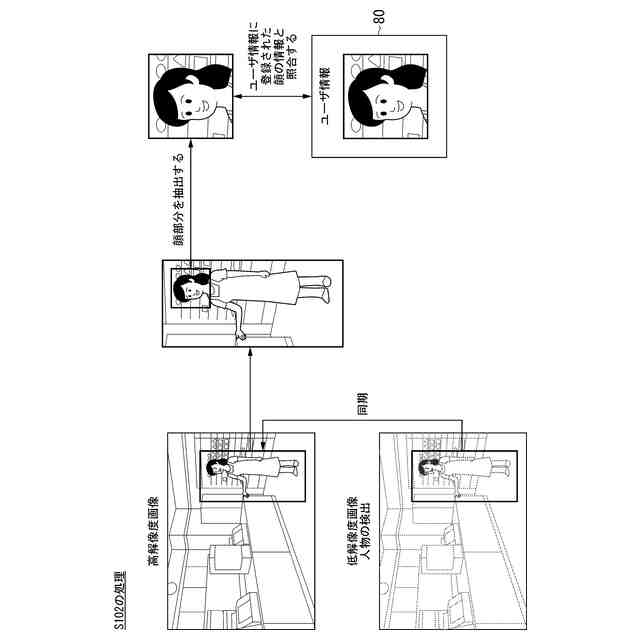
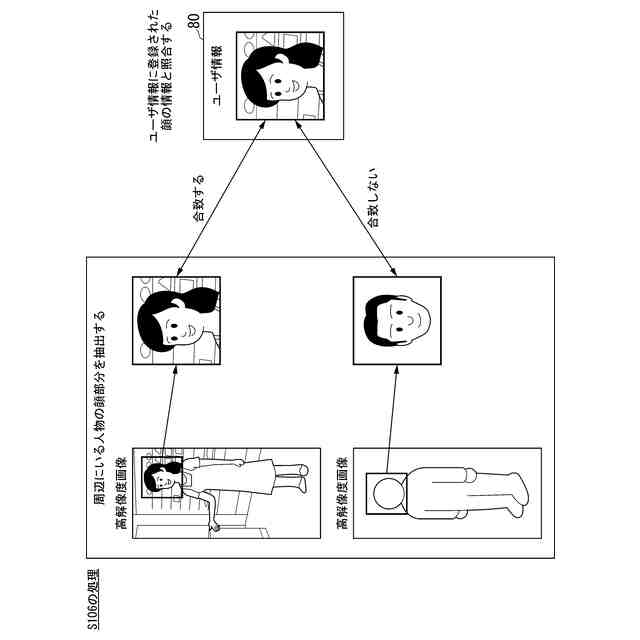
【解決手段】処理装置は、第1画像を撮像する撮像部と、前記第1画像を前記第1画像よりも低解像度の第2画像に変換する第1処理部と、前記第2画像における所定の対象物標を含む物標領域を特定し、前記第2画像における前記物標領域に基づいて、前記第1画像における前記対象物標を含む物標領域を特定する第2処理部と、を備え、前記物標領域における前記対象物標を認識するための領域である特定領域は、前記撮像部と前記対象物標との相対位置に応じて変化する。
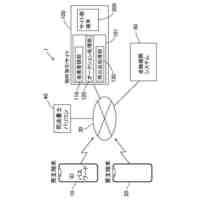
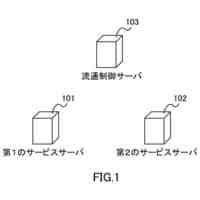
【選択図】図1
特許請求の範囲
【請求項1】
第1画像を撮像する撮像部と、
前記第1画像を前記第1画像よりも低解像度の第2画像に変換する第1処理部と、
前記第2画像における所定の対象物標を含む物標領域を特定し、前記第2画像における前記物標領域に基づいて、前記第1画像における前記対象物標を含む物標領域を特定する第2処理部と、を備え、
前記物標領域における前記対象物標を認識するための領域である特定領域は、前記撮像部と前記対象物標との相対位置に応じて変化する、
処理装置。
続きを表示(約 1,000 文字)
【請求項2】
前記相対位置は、前記撮像部から前記対象物標までの距離である、
請求項1に記載の処理装置。
【請求項3】
前記撮像部と前記対象物標との距離が所定値以上、または所定値超である領域を第1領域とし、
前記撮像部と前記対象物標との距離が所定値以下、または所定値未満である領域を第2領域とし、
前記第1領域の場合、前記特定領域を前記対象物標の第1特定領域とし、
前記第2領域の場合、前記特定領域を前記対象物標の第2特定領域とする、
請求項2に記載の処理装置。
【請求項4】
前記第2処理部は、
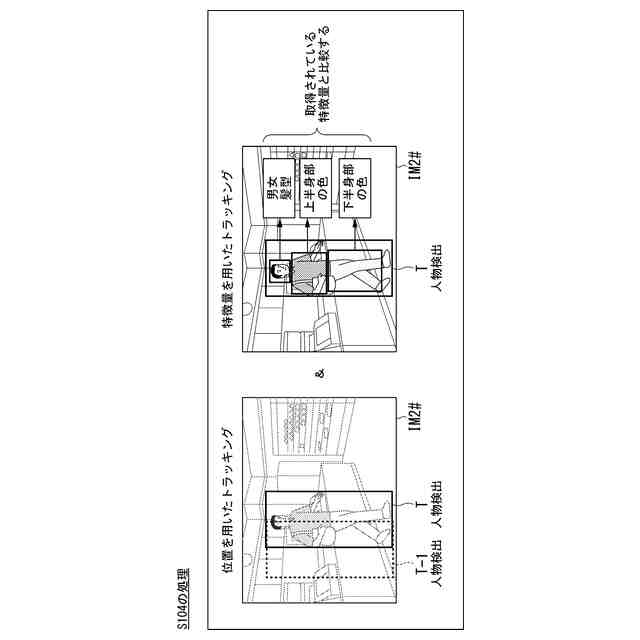
第1時刻に撮像された前記第1画像が変換された前記第2画像および、前記第1時刻よりも後の第2時刻に撮像された前記第1画像が変換された前記第2画像を解析し、前記第1時刻に対応する前記第2画像の前記物標領域に含まれる対象物標を、前記第2時刻に対応する前記第2画像においてトラッキングする、
請求項1に記載の処理装置。
【請求項5】
前記第2処理部は、
時系列で撮像された第1画像のそれぞれが変換された時系列の第2画像における前記対象物標の位置の変化に基づいて、前記第2画像における前記対象物標をトラッキングする、
請求項1に記載の処理装置。
【請求項6】
前記対象物標の認識は、前記第1画像における前記特定領域の情報に基づいて前記対象物標のジェスチャを認識する処理を含む、
請求項1に記載の処理装置。
【請求項7】
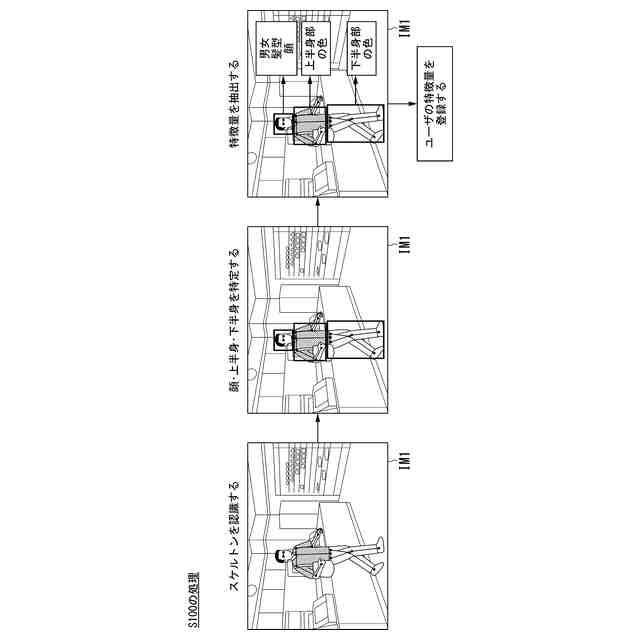
前記対象物標の認識は、前記特定領域を、前記第1画像における前記物標領域に対して骨格または関節点を認識することに基づき認識する処理を含む、
請求項1に記載の処理装置。
【請求項8】
前記対象物標の認識は、前記骨格または関節点の認識結果に基づいて前記対象物標の腕または手を含む領域を前記特定領域とする処理を含む、
請求項7に記載の処理装置。
【請求項9】
前記第1領域は、前記対象物標の手を含むであり、
前記第2領域は、前記対象物標の腕を含む領域である、
請求項3に記載の処理装置。
【請求項10】
請求項1から9のうちいずれか1項に記載の処理装置が搭載された移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、処理装置、移動体、処理方法、およびプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、2つのカメラにより撮像された画像を解析して物体をトラッキングする情報処理装置が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-88234号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の技術では、利用する機器の構成が煩雑であったり、処理負荷が高かったりする場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、処理負荷を軽減しつつ、精度よく物標を特定することができる処理装置、移動体、処理方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る処理装置、移動体、処理方法、およびプログラムは、以下の構成を採用した。
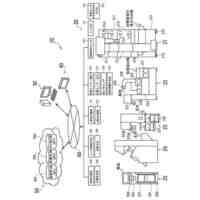
(1): この発明の一実施形態に係る処理装置は、第1画像を撮像する撮像部と、前記第1画像を前記第1画像よりも低解像度の第2画像に変換する第1処理部と、前記第2画像における所定の対象物標を含む物標領域を特定し、前記第2画像における前記物標領域に基づいて、前記第1画像における前記対象物標を含む物標領域を特定する第2処理部と、を備え、前記物標領域における前記対象物標を認識するための領域である特定領域は、前記撮像部と前記対象物標との相対位置に応じて変化する。
【0007】
(2):上記(1)の態様において、前記相対位置は、前記撮像部から前記対象物標までの距離である。
【0008】
(3):上記(2)の態様において、前記撮像部と前記対象物標との距離が所定値以上、または所定値超である領域を第1領域とし、前記撮像部と前記対象物標との距離が所定値以下、または所定値未満である領域を第2領域とし、前記第1領域の場合、前記特定領域を前記対象物標の第1特定領域とし、前記第2領域の場合、前記特定領域を前記対象物標の第2特定領域とする。
【0009】
(4):上記(1)の態様において、前記第2処理部は、第1時刻に撮像された前記第1画像が変換された前記第2画像および、前記第1時刻よりも後の第2時刻に撮像された前記第1画像が変換された前記第2画像を解析し、前記第1時刻に対応する前記第2画像の前記物標領域に含まれる対象物標を、前記第2時刻に対応する前記第2画像においてトラッキングする。
【0010】
(5):上記(1)の態様において、前記第2処理部は、時系列で撮像された第1画像のそれぞれが変換された時系列の第2画像における前記対象物標の位置の変化に基づいて、前記第2画像における前記対象物標をトラッキングする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
1か月前
個人
裁判のAI化
13日前
個人
情報処理装置
1か月前
個人
情報処理システム
20日前
個人
検査システム
22日前
個人
記入設定プラグイン
1か月前
個人
情報処理装置
1か月前
個人
プラグインホームページ
2か月前
個人
設計支援システム
5日前
個人
設計支援システム
5日前
キヤノン電子株式会社
携帯装置
21日前
個人
不動産売買システム
28日前
個人
情報入力装置
1か月前
株式会社サタケ
籾摺・調製設備
21日前
株式会社カクシン
支援装置
8日前
個人
物価スライド機能付生命保険
1か月前
個人
マイホーム非電子入札システム
1か月前
個人
備蓄品の管理方法
20日前
株式会社BONNOU
管理装置
1か月前
キヤノン株式会社
情報処理装置
21日前
サクサ株式会社
中継装置
21日前
キヤノン株式会社
情報処理装置
21日前
個人
決済手数料0%のクレジットカード
1か月前
株式会社東芝
電子機器
29日前
サクサ株式会社
カードの制動構造
1か月前
株式会社ワコム
電子消去具
28日前
東洋電装株式会社
操作装置
21日前
アスエネ株式会社
排水量管理方法
21日前
ホシデン株式会社
タッチ入力装置
28日前
キヤノン電子株式会社
名刺管理システム
22日前
東洋電装株式会社
操作装置
21日前
株式会社ライト
情報処理装置
1か月前
日本電気株式会社
システム及び方法
7日前
村田機械株式会社
割当補助システム
1か月前
株式会社JVCケンウッド
管理装置
22日前
個人
パターン抽出方法及び通信多重化方法
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ