TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025108895
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024002396
出願日
2024-01-11
発明の名称
車両制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
30/02 20120101AFI20250716BHJP(車両一般)
要約
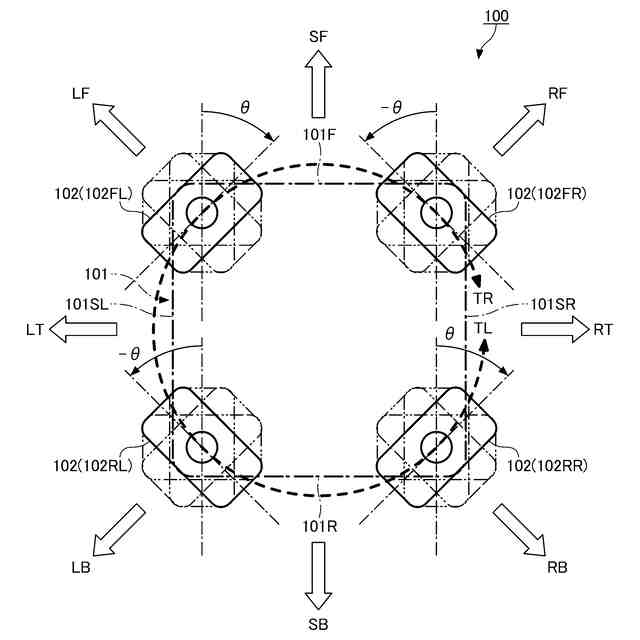
【課題】本開示は、4輪独立操舵車両の超信地旋回の停止時にその車両の乗員が受ける衝撃を緩和可能な車両制御方法を提供する。
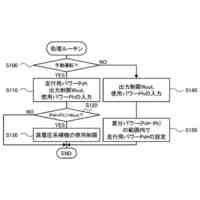
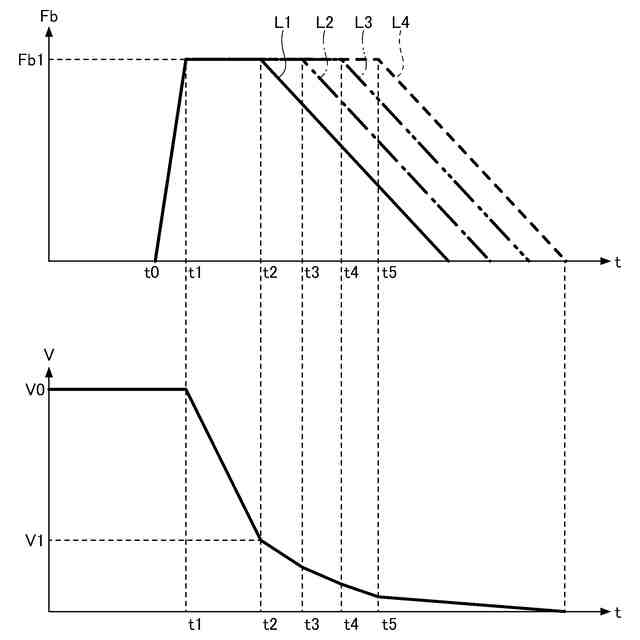
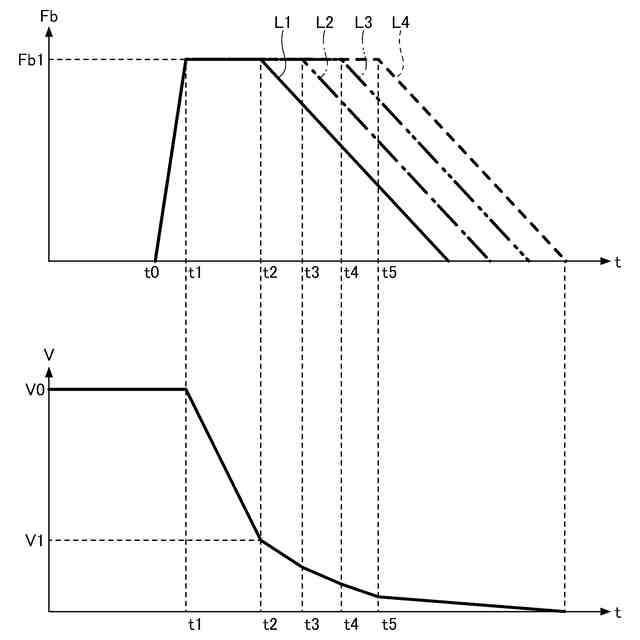
【解決手段】4輪独立操舵車両の超信地旋回中に複数の車輪に制動力Fb1を加えて回転速度Vを閾値V1まで低下させた後に複数の車輪の間で時間差を設けて制動力Fbを減少させる、車両制御方法。
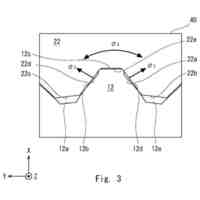
【選択図】図3
特許請求の範囲
【請求項1】
4輪独立操舵車両の超信地旋回中に複数の車輪に制動力を加えて回転速度を閾値まで低下させた後に前記複数の車輪の間で時間差を設けて制動力を減少させる、車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御方法に関する。
続きを表示(約 940 文字)
【背景技術】
【0002】
従来、三輪以上のタイヤが独立して転舵可能な独立転舵車両において車両の走行を制御する車両走行制御装置が知られている(例えば、下記特許文献1)。
【0003】
上記車両走行制御装置では、加速時に、疑似前輪部の駆動力を疑似後輪部の駆動力よりも大きく設定し、制動時に、疑似後輪部の制動力を疑似前輪部の制動力よりも大きく設定することで、リフトアップを防ぐことができる。
【先行技術文献】
【特許文献】
【0004】
特開2022-088025号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載された三輪以上のタイヤが独立して転舵可能な独立転舵車両は、車両をその場で旋回させる超信地旋回時の回転速度の調整が難しく、超信地旋回の停止時に車両の乗員が受ける衝撃が大きくなる傾向がある。
【0006】
本開示は、4輪独立操舵車両の超信地旋回の停止時にその車両の乗員が受ける衝撃を緩和可能な車両制御方法を提供する。
【課題を解決するための手段】
【0007】
本開示の一つの態様は、4輪独立操舵車両の超信地旋回中に複数の車輪に制動力を加えて回転速度を閾値まで低下させた後に前記複数の車輪の間で時間差を設けて制動力を減少させる、車両制御方法を提供する。
【発明の効果】
【0008】
本開示の上記の態様によれば、4輪独立操舵車両の超信地旋回の停止時にその車両の乗員が受ける衝撃を緩和可能な車両制御方法を提供することができる。
【図面の簡単な説明】
【0009】
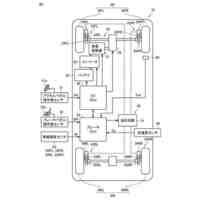
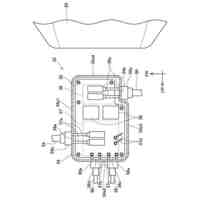
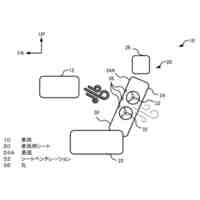
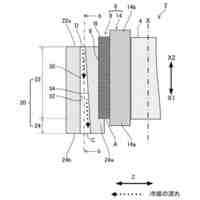
本開示に係る車両制御方法の実施形態における制御対象の模式図である。
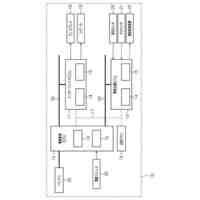
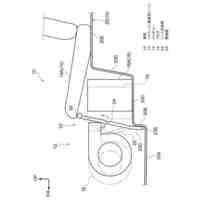
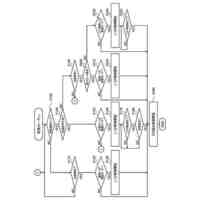
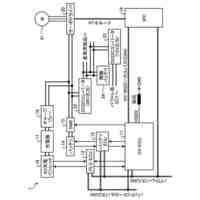
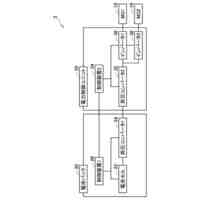
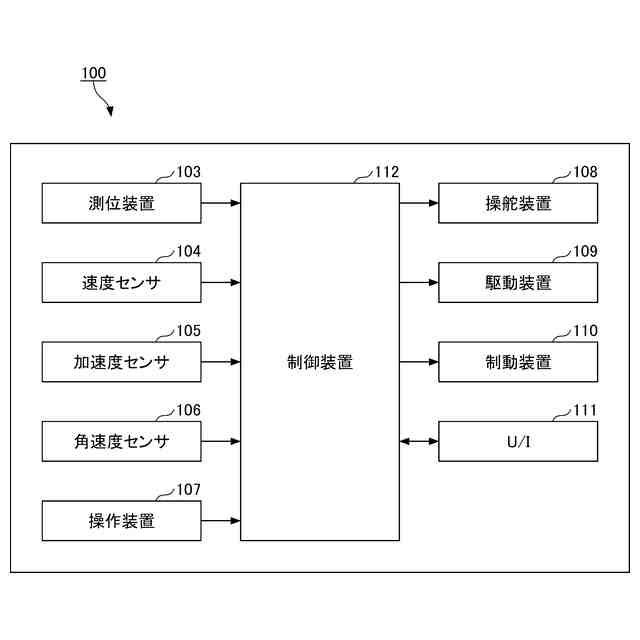
図1の制御対象としての4輪独立操舵車両の構成例を示すブロック図である。
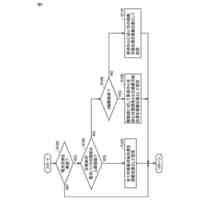
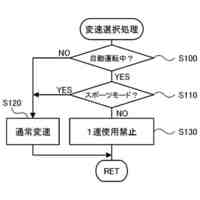
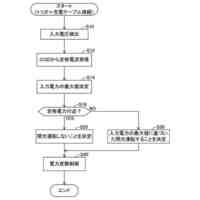
本開示に係る車両制御方法の実施形態を説明するグラフである。
【発明を実施するための形態】
【0010】
以下、図面を参照して発明を実施するための形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
装置
1か月前
トヨタ自動車株式会社
方法
26日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
方法
19日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電極
1か月前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
膜体
4日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電極
26日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
16日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
移動体
18日前
トヨタ自動車株式会社
電極体
24日前
トヨタ自動車株式会社
自動車
1か月前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
充電器
16日前
トヨタ自動車株式会社
軸部材
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ