TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109331
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024003141
出願日
2024-01-12
発明の名称
飽和回避制御装置、姿勢制御装置、自走式移動装置及び飽和回避制御方法
出願人
学校法人神奈川大学
代理人
個人
,
個人
主分類
B64G
1/28 20060101AFI20250717BHJP(航空機;飛行;宇宙工学)
要約
【課題】CMGによる高精度な姿勢制御を連続して長い期間持続することを可能にする。
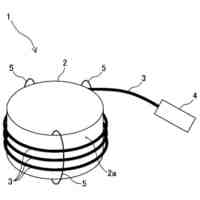
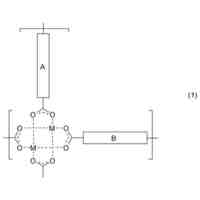
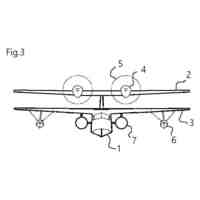
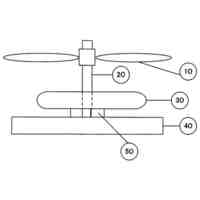
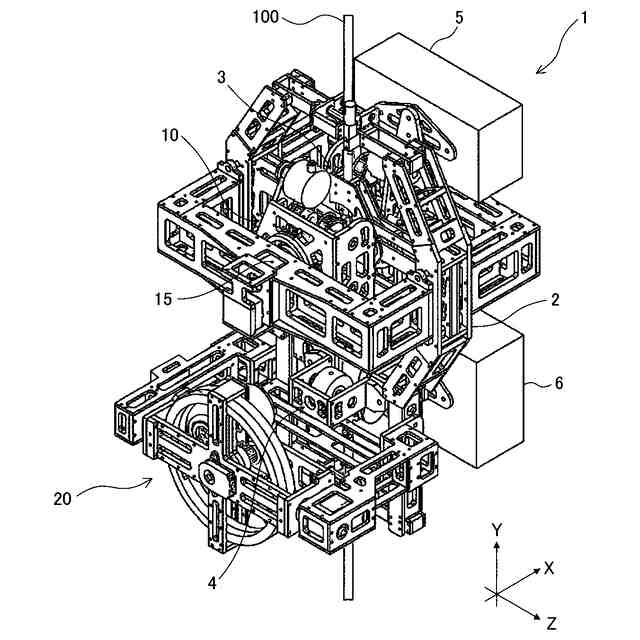
【解決手段】姿勢制御対象1の姿勢制御中におけるコントロール・モーメント・ジャイロ(CMG)の制御飽和を回避するための飽和回避制御を実行する飽和回避制御装置6であって、姿勢制御中のコントロール・モーメント・ジャイロが発生させる姿勢制御トルクτgと同軸回りの飽和回避トルクτsを、ジャイロ効果を用いずに発生させるトルク発生装置10の制御を行うトルク制御部を有し、トルク制御部は、飽和回避トルクによる姿勢制御対象の姿勢変化が、姿勢制御中のコントロール・モーメント・ジャイロのホイール軸21aの傾き角度θgを初期角度へ近づけるように、飽和回避トルクの制御を行う。
【選択図】図1
特許請求の範囲
【請求項1】
姿勢制御対象の姿勢制御中におけるコントロール・モーメント・ジャイロの制御飽和を回避するための飽和回避制御を実行する飽和回避制御装置であって、
姿勢制御中の前記コントロール・モーメント・ジャイロが発生させる姿勢制御トルクと同軸回りの飽和回避トルクを、ジャイロ効果を用いずに発生させるトルク発生装置の制御を行うトルク制御部を有し、
前記トルク制御部は、前記飽和回避トルクによる前記姿勢制御対象の姿勢変化が、姿勢制御中の前記コントロール・モーメント・ジャイロのホイール軸の傾き角度を初期角度へ近づけるように、前記飽和回避トルクの制御を行うことを特徴とする飽和回避制御装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の飽和回避制御装置において、
前記トルク発生装置は、前記飽和回避トルクを発生し続けることが可能な非飽和構成であることを特徴とする飽和回避制御装置。
【請求項3】
請求項2に記載の飽和回避制御装置において、
前記コントロール・モーメント・ジャイロによる姿勢制御は、所定の細長い部材の軸線回りにおける前記姿勢制御対象の回転位置を制御するものであり、
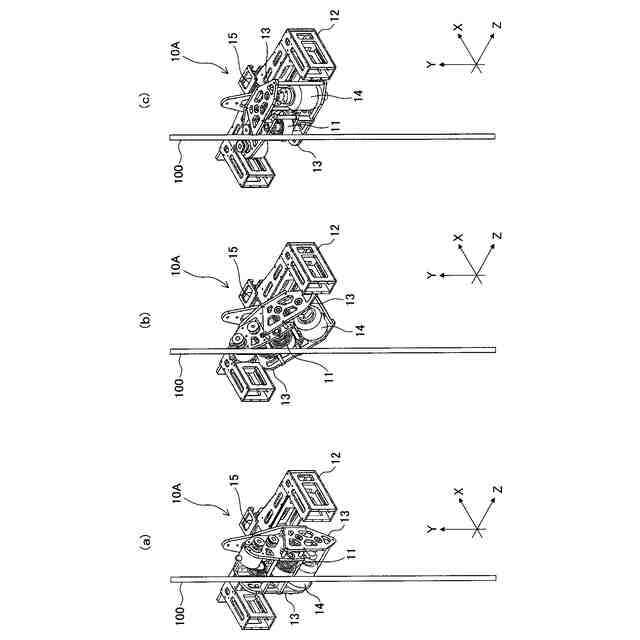
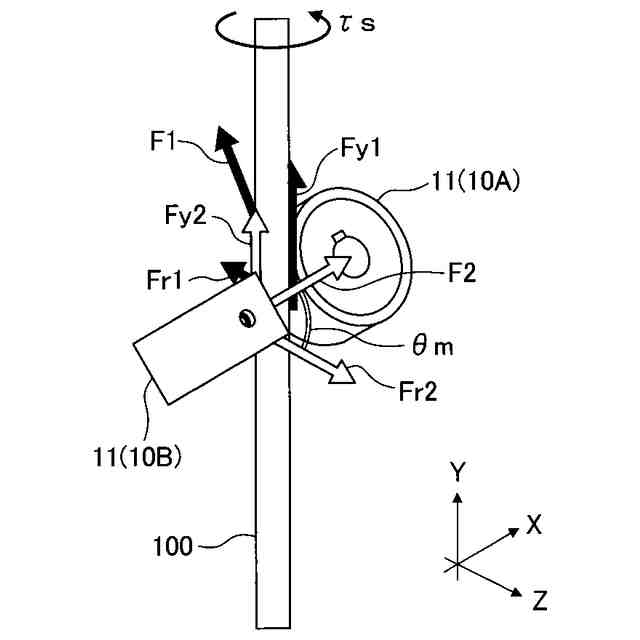
前記トルク発生装置は、前記細長い部材の周面に当接して該細長い部材の軸線回りに前記姿勢制御対象を回転駆動させる駆動回転体と、該細長い部材の軸線に対する該駆動回転体の回転軸の角度を変更する軸角度変更部とを備え、
前記トルク制御部は、前記軸角度変更部に前記駆動回転体の回転軸の角度を変更させる制御により、前記飽和回避トルクの制御を行うことを特徴とする飽和回避制御装置。
【請求項4】
請求項2又は3に記載の飽和回避制御装置において、
前記コントロール・モーメント・ジャイロによる姿勢制御は、所定の細長い部材の軸線回りにおける前記姿勢制御対象の回転位置を制御するものであり、
前記トルク発生装置は、前記細長い部材の周面に当接して該細長い部材の軸線回りに前記姿勢制御対象を回転駆動させる駆動回転体を備え、
前記トルク制御部は、前記駆動回転体の駆動制御により、前記飽和回避トルクの制御を行うことを特徴とする飽和回避制御装置。
【請求項5】
請求項1乃至3のいずれか1項に記載の飽和回避制御装置において、
前記トルク制御部は、前記飽和回避トルクの制御を所定の時間間隔で連続的に行うことを特徴とする飽和回避制御装置。
【請求項6】
請求項1乃至3のいずれか1項に記載の飽和回避制御装置において、
前記トルク制御部は、姿勢制御中の前記コントロール・モーメント・ジャイロのホイール軸の傾き角度が、前記初期角度から所定角度以上離れたときには前記飽和回避トルクの制御を行い、前記初期角度から前記所定角度未満の範囲内であるときには前記飽和回避トルクの制御を行わないことを特徴とする飽和回避制御装置。
【請求項7】
請求項1乃至3のいずれか1項に記載の飽和回避制御装置において、
前記トルク制御部は、姿勢制御中の前記コントロール・モーメント・ジャイロの制御目標値を取得し、該制御目標値を用いて前記飽和回避トルクの制御を行うことを特徴とする飽和回避制御装置。
【請求項8】
コントロール・モーメント・ジャイロを用いて姿勢制御対象の姿勢制御を行う姿勢制御装置であって、
姿勢制御中の前記コントロール・モーメント・ジャイロが発生させる姿勢制御トルクと同軸回りの飽和回避トルクを、ジャイロ効果を用いずに発生させるトルク発生装置と、
姿勢制御対象の姿勢制御中における前記コントロール・モーメント・ジャイロの制御飽和を回避するための飽和回避制御を実行する飽和回避制御装置とを有し、
前記飽和回避制御装置として、請求項1乃至3のいずれか1項に記載の飽和回避制御装置を用いることを特徴とする姿勢制御装置。
【請求項9】
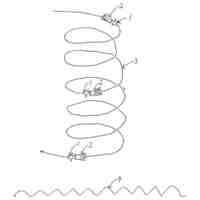
細長い経路部材の周面に当接する駆動回転体の回転駆動力により該経路部材に沿って移動する自走式移動装置であって、
前記経路部材の軸線に対する前記駆動回転体の回転軸の角度を変更する軸角度変更部を備え、
前記経路部材の軸線回りにおける当該自走式移動装置の回転位置を制御する姿勢制御を行う姿勢制御装置として、請求項8に記載の姿勢制御装置を用い、
前記飽和回避制御装置として、請求項3に記載の飽和回避制御装置を用い、
前記トルク制御部は、前記軸角度変更部に前記駆動回転体の回転軸の角度を変更させる制御により、前記飽和回避トルクの制御を行うことを特徴とする自走式移動装置。
【請求項10】
請求項9に記載の自走式移動装置において、
前記コントロール・モーメント・ジャイロによる姿勢制御は、前記経路部材の軸線回りに時間変化する目標回転位置に当該自走式移動装置の回転位置が追従するように制御するものであることを特徴とする自走式移動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、姿勢制御対象の姿勢制御中におけるコントロール・モーメント・ジャイロ(以下「CMG」ともいう。)の制御飽和を回避するための飽和回避制御を実行する飽和回避制御装置、姿勢制御装置、自走式移動装置及び飽和回避制御方法に関するものである。
続きを表示(約 4,300 文字)
【背景技術】
【0002】
一般に、CMGは、回転するホイールの回転軸(ホイール軸)をジンバルの回転軸(ジンバル軸)回りで回動させることにより、ホイール軸の傾き角度(初期角度に対する相対角度)を変更してジャイロ効果による姿勢制御トルクを発生させる。CMGでは、ジンバルを制御してホイール軸の傾き角度を変更することで生じる姿勢制御トルクを用いて、姿勢制御対象の姿勢を変化させ、姿勢制御対象の姿勢が目標姿勢となるように制御する。このようなCMGを用いた姿勢制御装置としては、例えば、特許文献1などに開示されたものが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-035794号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
CMGは、高精度な姿勢制御を実現できることから、高精度な姿勢制御が求められる多くの姿勢制御対象において活用が検討されている。しかしながら、CMGは、姿勢制御が可能なホイール軸の傾き角度の制御範囲には限界があり、一定方向の飽和回避トルクを発生し続けることができない。そのため、CMGは、姿勢制御によりホイール軸の傾き角度が限界角度まで達してしまうと、それ以上の姿勢制御ができない制御飽和状態となる。よって、従来の姿勢制御装置では、CMGによる高精度な姿勢制御を、連続して長い期間持続することができないという課題があった。
【課題を解決するための手段】
【0005】
本発明の一態様は、姿勢制御対象の姿勢制御中におけるコントロール・モーメント・ジャイロの制御飽和を回避するための飽和回避制御を実行する飽和回避制御装置であって、姿勢制御中の前記コントロール・モーメント・ジャイロが発生させる姿勢制御トルクと同軸回りの飽和回避トルクを、ジャイロ効果を用いずに発生させるトルク発生装置の制御を行うトルク制御部を有し、前記トルク制御部は、前記飽和回避トルクによる前記姿勢制御対象の姿勢変化が、姿勢制御中の前記コントロール・モーメント・ジャイロのホイール軸の傾き角度を初期角度へ近づけるように、前記飽和回避トルクの制御を行うことを特徴とするものである。
コントロール・モーメント・ジャイロ(CMG)の制御飽和を回避する方法としては、例えば、限界角度に達したCMGのホイール軸の傾き角度を当該CMGのジンバルにより初期角度まで戻すという方法が考えられる。しかしながら、この方法では、ホイール軸の傾き角度を初期角度まで戻す間は当該CMGによる姿勢制御を中断する必要があるため、姿勢制御ができない期間が生じ、連続した姿勢制御を持続することができない。また、当該CMGのホイールを回転状態のまま、ホイール軸の傾き角度を初期角度まで急激に戻すと、反力で姿勢制御対象の制御が困難となる。
また、1つの姿勢制御対象を複数のCMGを用いて姿勢制御することにより、1つのCMGが制御飽和状態になっても他のCMGによる姿勢制御を継続することで、連続した姿勢制御を持続させるという方法も考えられる。しかしながら、この方法では、すべてのCMGが制御飽和状態になってしまうと姿勢制御できない状態になるため、連続した姿勢制御を持続できない場合が生じ得る。
本態様では、CMGが発生させる姿勢制御トルクと同軸回りの飽和回避トルクを発生させるトルク発生装置を用い、姿勢制御中のCMGのホイール軸の傾き角度を初期角度へ近づける飽和回避トルクを当該トルク発生装置により発生させる。この飽和回避トルクによって、姿勢制御中にCMGのホイール軸の傾き角度が限界角度に到達してしまう事態(制御飽和状態)を回避することができる。そして、本態様では、飽和回避トルクを発生させるトルク発生装置として、ジャイロ効果を用いずに当該飽和回避トルクを発生させるものを採用する。これにより、CMGと同様に一定方向の飽和回避トルクを発生し続けることができないようなトルク発生装置と比較して、より長い期間、飽和回避トルクによるCMGの制御飽和状態の回避制御(飽和回避制御)を持続することが可能である。よって、本態様によれば、CMGによる高精度な姿勢制御を、連続して、より長い期間持続することが可能となる。
【0006】
前記飽和回避制御装置において、前記トルク発生装置は、前記飽和回避トルクを発生し続けることが可能な非飽和構成であってもよい。
これによれば、飽和回避トルクによるCMGの制御飽和状態の回避制御(飽和回避制御)を持続することができるので、連続した姿勢制御を安定して持続することができる。
【0007】
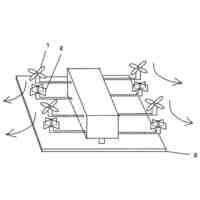
前記飽和回避制御装置において、前記コントロール・モーメント・ジャイロによる姿勢制御は、所定の細長い部材の軸線回りにおける前記姿勢制御対象の回転位置を制御するものであってもよく、前記トルク発生装置は、前記細長い部材の周面に当接して該細長い部材の軸線回りに前記姿勢制御対象を回転駆動させる駆動回転体と、該細長い部材の軸線に対する該駆動回転体の回転軸の角度を変更する軸角度変更部とを備えてもよく、前記トルク制御部は、前記軸角度変更部に前記駆動回転体の回転軸の角度を変更させる制御により、前記飽和回避トルクの制御を行ってもよい。
本態様も、所定の細長い部材の軸線回りにおける姿勢制御対象の回転位置(姿勢)をCMGにより制御する場合における当該CMGの飽和回避制御に適用されるものである。ただし、本態様では、トルク発生装置として、前記細長い部材の周面に当接して当該細長い部材の軸線回りに姿勢制御対象を回転駆動させる駆動回転体と、当該細長い部材の軸線に対する駆動回転体の回転軸の角度を変更する軸角度変更部とを備えるものを用いる。そして、このトルク発生装置を用い、軸角度変更部に駆動回転体の回転軸の角度を変更させる制御を行うことで、細長い部材の軸線回りに所望の飽和回避トルクを発生させ続けることができる。これによれば、CMGの制御飽和状態を回避するための飽和回避トルクを発生させ続けることが可能となるので、前記細長い部材の軸線回りにおける姿勢制御対象の回転位置(姿勢)の制御を安定して持続することができる。
特に、本態様では、駆動回転体を一定方向に回転駆動させたまま、軸角度変更部による駆動回転体の回転軸の角度変更により、細長い部材の軸線回りにおいて右回りの飽和回避トルクと左回りの飽和回避トルクのいずれも発生させることが可能である。したがって、駆動回転体の回転方向を正逆切り替える制御が不要となり、飽和回避トルクによるCMGの制御飽和状態をよりスムーズに回避することが可能である。
【0008】
前記飽和回避制御装置において、前記コントロール・モーメント・ジャイロによる姿勢制御は、所定の細長い部材の軸線回りにおける前記姿勢制御対象の回転位置を制御するものであってもよく、前記トルク発生装置は、前記細長い部材の周面に当接して該細長い部材の軸線回りに前記姿勢制御対象を回転駆動させる駆動回転体を備えてもよく、前記トルク制御部は、前記駆動回転体の駆動制御により、前記飽和回避トルクの制御を行ってもよい。
本態様は、所定の細長い部材の軸線回りにおける姿勢制御対象の回転位置(姿勢)をCMGにより制御する場合における当該CMGの飽和回避制御に適用されるものである。本態様では、飽和回避トルクを発生させるトルク発生装置として、前記細長い部材の周面に当接して当該細長い部材の軸線回りに姿勢制御対象を回転駆動させる駆動回転体を備えるものを用いる。このトルク発生装置を用い、駆動回転体の駆動制御(例えば、駆動回転体の回転速度や回転方向などの制御)を行うことで、細長い部材の軸線回りに所望の飽和回避トルクを発生させ続けることができる。これによれば、CMGの制御飽和状態を回避するための飽和回避トルクを発生させ続けることが可能となるので、前記細長い部材の軸線回りにおける姿勢制御対象の回転位置(姿勢)の制御を安定して持続することができる。
【0009】
前記飽和回避制御装置において、前記トルク制御部は、前記飽和回避トルクの制御を所定の時間間隔で連続的に行ってもよい。
これによれば、飽和回避トルクの制御が所定の時間間隔で連続的に行われる結果、CMGのホイール軸の傾き角度を初期角度付近で変化させながら、姿勢制御を行うことが可能となる。初期角度付近でCMGによる姿勢制御を行う場合、初期角度から離れた角度でCMGによる姿勢制御を行う場合よりも、大きな姿勢制御トルクで姿勢制御を行うことができるので、姿勢制御対象の姿勢をより迅速に変化させることができ、より高精度な姿勢制御が可能となる。
【0010】
前記飽和回避制御装置において、前記トルク制御部は、姿勢制御中の前記コントロール・モーメント・ジャイロのホイール軸の傾き角度が、前記初期角度から所定角度以上離れたときには前記飽和回避トルクの制御を行い、前記初期角度から前記所定角度未満の範囲内であるときには前記飽和回避トルクの制御を行わないとしてもよい。
CMGによる姿勢制御トルクで姿勢制御対象の姿勢制御を行うにあたり、CMGの制御飽和を回避するための飽和回避トルクは、姿勢制御トルクによる姿勢制御を阻害する外乱トルクであると言える。本態様では、姿勢制御中のCMGのホイール軸の傾き角度が初期角度から所定角度未満の範囲内である場合には、姿勢制御中のCMGのホイール軸の傾き角度を初期角度へ近づけるための飽和回避トルクの制御が行われない。これによれば、ホイール軸の傾き角度が前記範囲内である間は、飽和回避トルクの外乱を受けることなく、CMGによる姿勢制御トルクによって姿勢制御対象の姿勢制御を行うことができ、より高精度な姿勢制御が実現可能である。
一方で、姿勢制御中のCMGのホイール軸の傾き角度が初期角度から所定角度以上離れたときには、飽和回避トルクの制御が行われ、姿勢制御中にCMGのホイール軸の傾き角度を初期角度へ近づけるように補正される。その結果、CMGが制御飽和状態になることを回避することができる。
以上より、本態様によれば、CMGが制御飽和状態になることを回避しつつも、CMGによる高精度な姿勢制御を実現することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人神奈川大学
展開式浮体装置
3か月前
学校法人神奈川大学
制御装置及び推定装置
1か月前
学校法人神奈川大学
エネルギー変換器及び加工装置
24日前
学校法人神奈川大学
接着加工部材の製造方法及び治具
1か月前
学校法人神奈川大学
連結分離装置及びその組み立て方法
3か月前
学校法人神奈川大学
化合物及びそれを含んでなる発光材料
1か月前
株式会社イノアック技術研究所
高分子
5か月前
学校法人神奈川大学
芳香族ポリエステルおよびその製造方法
1か月前
学校法人神奈川大学
ポリマー材料、成型体又は重合性半製品の製造方法
12日前
学校法人神奈川大学
高分子化合物を分解する方法、及びそのための組成物
12日前
学校法人神奈川大学
シクロペンタ-縮環多環芳香族炭化水素化合物の製造方法
1か月前
学校法人神奈川大学
飽和回避制御装置、姿勢制御装置、自走式移動装置及び飽和回避制御方法
2か月前
日本化学工業株式会社
ホスフィンパラジウム錯体、重合触媒及び芳香族ポリマーの製造方法
3か月前
ダイキン工業株式会社
フッ素含有ポリマーの分解方法
2か月前
学校法人神奈川大学
バナジウムの回収方法、及びバナジウムとその他の金属とを含む溶液からバナジウムを選択的に回収する方法
1か月前
学校法人神奈川大学
化合物、エポキシ基含有化合物に対する反応剤、硬化性組成物及び化学反応方法
4か月前
学校法人神奈川大学
クラックパターン膜及びそれからなる透明導電膜形成用マスク、クラックパターン膜の製造方法、透明導電膜の製造方法、導電膜の基材に対する密着性を向上させる方法、並びに導電膜
1か月前
個人
ドローン
7か月前
個人
人工台風
2か月前
個人
着火ドローン
4か月前
個人
救難消防飛行艇
4か月前
個人
ドローンシステム
8か月前
東レ株式会社
中空回転翼
3か月前
個人
無人空中移動体
1日前
個人
動力原付きグライダー
17日前
個人
連続回転可能な飛行機翼
4か月前
個人
陸海空用の乗り物
5か月前
個人
導風板付き垂直離着陸機
2か月前
東レ株式会社
プロペラブレード
3か月前
東レ株式会社
プロペラブレード
3か月前
個人
空飛ぶクルマ
3か月前
個人
垂直離着陸機用エンジン改
8か月前
東レ株式会社
プロペラブレード
3か月前
個人
ドローン消音装置
11か月前
個人
空中移動システム
9か月前
個人
ドローンを自動離着陸する方法
8か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ