TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115330
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2024009826
出願日
2024-01-25
発明の名称
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250730BHJP(基本的電気素子)
要約
【課題】干渉確認を行う時間を短縮することが可能なワーク搬送ロボットの干渉確認方法を提供する。
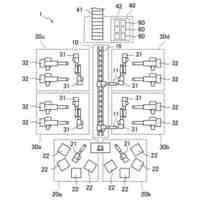
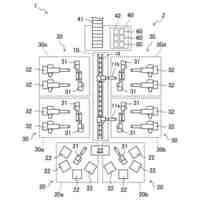
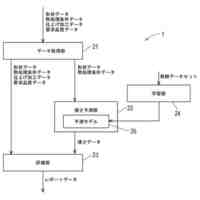
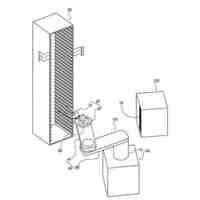
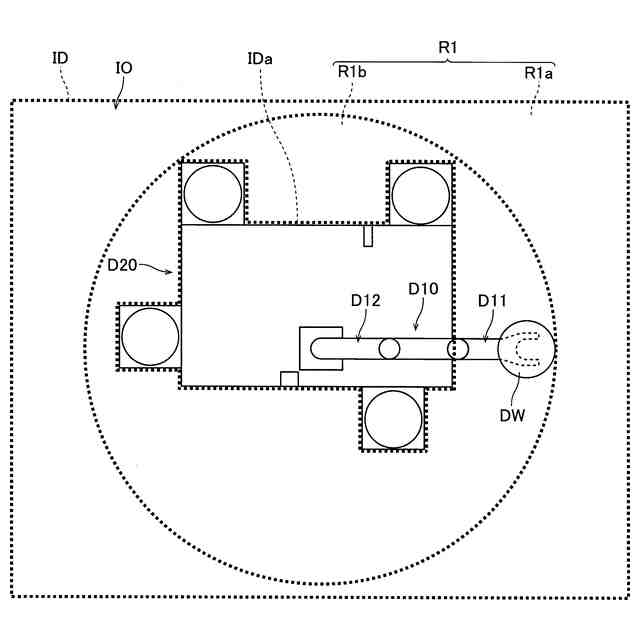
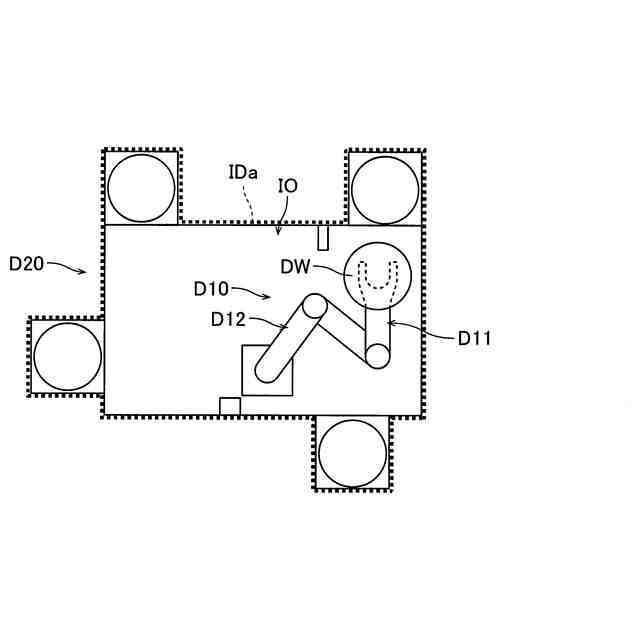
【解決手段】この基板搬送ロボット10の干渉確認方法では、ロボットCADデータCD1および配置領域CADデータCD2を統合した統合データIDにおいて、基板搬送ロボット10を構成するロボット部分D10が到達不可能な到達不可能領域R1を、基板搬送ロボット10が配置される配置領域20を構成する配置領域部分D20にロボット部分D10が干渉するか否かの干渉確認を行う干渉確認対象物IOから除外する前処理を行うことを備える。
【選択図】図4
特許請求の範囲
【請求項1】
ワークを保持するエンドエフェクタと、前記エンドエフェクタが取り付けられたロボットアームと、を含むワーク搬送ロボットのコンピュータ支援設計データであるロボットCADデータおよび前記ワーク搬送ロボットが配置される配置領域のコンピュータ支援設計データである配置領域CADデータを統合した統合データにおいて、前記ワーク搬送ロボットを構成するロボット部分が到達不可能な到達不可能領域を、前記配置領域を構成する配置領域部分に前記ロボット部分が干渉するか否かの干渉確認を行う干渉確認対象物から除外する前処理を行うことと、
前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データを用いて前記干渉確認を行うことと、を備える、ワーク搬送ロボットの干渉確認方法。
続きを表示(約 2,200 文字)
【請求項2】
前記統合データにおいて前記到達不可能領域を前記干渉確認対象物から除外する前記前処理を行うことは、前記ロボットCADデータ、前記ワーク搬送ロボットおよび前記ワークが配置される前記配置領域のコンピュータ支援設計データである前記配置領域CADデータ、および、前記ワークのコンピュータ支援設計データであるワークCADデータを統合した前記統合データにおいて、前記ロボット部分および前記ワークを構成するワーク部分が到達不可能な前記到達不可能領域を、前記配置領域部分に前記ロボット部分または前記ワーク部分が干渉するか否かの前記干渉確認を行う前記干渉確認対象物から除外することを含む、請求項1に記載のワーク搬送ロボットの干渉確認方法。
【請求項3】
前記統合データにおいて前記到達不可能領域を前記干渉確認対象物から除外する前記前処理を行うことは、3次元の前記統合データにおいて前記到達不可能領域を前記干渉確認対象物から除外することを含み、
前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データを用いて前記干渉確認を行うことは、前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した3次元の前記統合データを用いて前記干渉確認を行うことを含む、請求項1に記載のワーク搬送ロボットの干渉確認方法。
【請求項4】
前記統合データにおいて前記到達不可能領域を前記干渉確認対象物から除外する前記前処理を行うことは、前記統合データにおいて前記ロボットアームを構成するロボットアーム部分を最大限延ばした状態で前記ロボット部分が届かない前記到達不可能領域を前記干渉確認対象物から除外することを含む、請求項1に記載のワーク搬送ロボットの干渉確認方法。
【請求項5】
前記統合データにおいて前記到達不可能領域を前記干渉確認対象物から除外する前記前処理を行うことは、前記統合データにおいて前記配置領域部分の外側の前記到達不可能領域を前記干渉確認対象物から除外することを含む、請求項1に記載のワーク搬送ロボットの干渉確認方法。
【請求項6】
前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データを用いて前記干渉確認を行うことは、前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データにおいて、前記エンドエフェクタを構成するエンドエフェクタ部分が予め設定された経由点を経由するように前記ロボット部分が到達可能な到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外して前記干渉確認を行うことを含む、請求項1に記載のワーク搬送ロボットの干渉確認方法。
【請求項7】
前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データにおいて前記到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外して前記干渉確認を行うことは、前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データにおいて、複数の第1の矩形領域から構成される前記到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外した後に、前記第1の矩形領域よりも小さい複数の第2の矩形領域から構成される前記到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外して、前記干渉確認を行うことを含む、請求項6に記載のワーク搬送ロボットの干渉確認方法。
【請求項8】
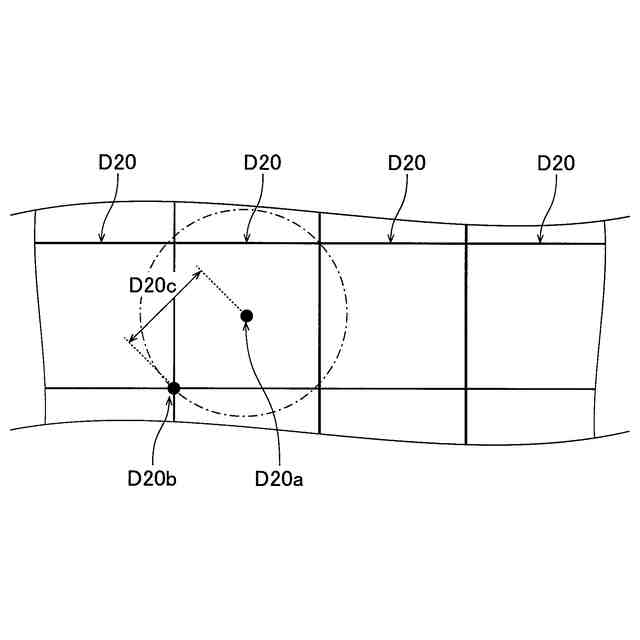
前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データにおいて、前記到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外して前記干渉確認を行うことは、前記配置領域部分の重心と前記重心から最も遠い前記配置領域部分の端部との距離を用いて、前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データにおいて、前記到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外して前記干渉確認を行うことを含む、請求項6に記載のワーク搬送ロボットの干渉確認方法。
【請求項9】
前記前処理により前記到達不可能領域を前記干渉確認対象物から除外した前記統合データにおいて、前記到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外して前記干渉確認を行うことは、前記前処理により前記到達不可能領域を前記干渉確認対象物から除外し、かつ、前記到達可能領域に含まれない前記配置領域部分を前記干渉確認対象物から除外した前記統合データにおいて、前記配置領域部分に前記ワーク搬送ロボットのうちの外側の部分に対応するロボット外側部分が干渉するか否かの前記干渉確認を行うことを含む、請求項6に記載のワーク搬送ロボットの干渉確認方法。
【請求項10】
前記ワークは、半導体基板であり、
前記エンドエフェクタは、前記半導体基板を保持するハンドであり、
前記ロボットアームは、水平多関節型のロボットアームであり、
前記ワーク搬送ロボットは、前記半導体基板を搬送する基板搬送ロボットであり、
前記配置領域は、前記基板搬送ロボットが配置される基板搬送室と、前記半導体基板が載置される基板載置部と、を含む、請求項1に記載のワーク搬送ロボットの干渉確認方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、ロボットの動作経路を導出するロボット動作経路生成方法が知られている。たとえば、特許文献1には、ロボットが障害物に干渉しないようにロボットの動作経路をシミュレーションして導出するロボット動作経路生成方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-193975号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されているロボット動作経路生成方法では、ロボットが障害物に干渉しないようにロボットの動作経路をシミュレーションして導出するので、ロボットが障害物に干渉するか否かを確認する干渉確認対象物が非常に多く、干渉確認を行うのに比較的長い時間を要する。このため、干渉確認を行う時間を短縮することが可能な構成が望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、干渉確認を行う時間を短縮することが可能なワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、この開示の第1の局面によるワーク搬送ロボットの干渉確認方法は、ワークを保持するエンドエフェクタと、エンドエフェクタが取り付けられたロボットアームと、を含むワーク搬送ロボットのコンピュータ支援設計データであるロボットCADデータおよびワーク搬送ロボットが配置される配置領域のコンピュータ支援設計データである配置領域CADデータを統合した統合データにおいて、ワーク搬送ロボットを構成するロボット部分が到達不可能な到達不可能領域を、配置領域を構成する配置領域部分にロボット部分が干渉するか否かの干渉確認を行う干渉確認対象物から除外する前処理を行うことと、前処理により到達不可能領域を干渉確認対象物から除外した統合データを用いて干渉確認を行うことと、を備える。
【0007】
この開示の第1の局面によるワーク搬送ロボットの干渉確認方法は、上記のように、ロボットCADデータおよび配置領域CADデータを統合した統合データにおいて、ワーク搬送ロボットを構成するロボット部分が到達不可能な到達不可能領域を、ワーク搬送ロボットが配置される配置領域を構成する配置領域部分にロボット部分が干渉するか否かの干渉確認を行う干渉確認対象物から除外する前処理を行うことと、前処理により到達不可能領域を干渉確認対象物から除外した統合データを用いて干渉確認を行うことと、を備える。これにより、干渉確認を行う前に、前処理により、統合データにおいて到達不可能領域を干渉確認対象物から除外して、統合データのデータ量を削減することができる。すなわち、前処理によりデータ量が削減された統合データを用いて干渉確認を行うことができる。その結果、干渉確認を行う時間を短縮することができる。
【0008】
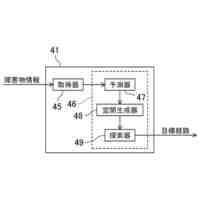
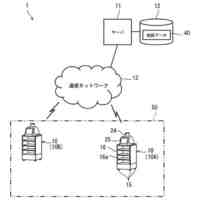
また、上記目的を達成するために、この開示の第2の局面によるロボットの動作経路生成装置は、ワークを保持するエンドエフェクタと、エンドエフェクタが取り付けられたロボットアームと、を含むワーク搬送ロボットのコンピュータ支援設計データであるロボットCADデータおよびワーク搬送ロボットが配置される配置領域のコンピュータ支援設計データである配置領域CADデータを統合した統合データにおいて、ワーク搬送ロボットを構成するロボット部分が到達不可能な到達不可能領域を、配置領域を構成する配置領域部分にロボット部分が干渉するか否かの干渉確認を行う干渉確認対象物から除外する前処理を行うとともに、前処理により到達不可能領域を干渉確認対象物から除外した統合データを用いて干渉確認を行う制御部と、干渉確認に関する情報の入力を受け付ける入力部と、を備える。
【0009】
この開示の第2の局面によるワーク搬送ロボットの干渉確認装置は、上記のように、ロボットCADデータおよび配置領域CADデータを統合した統合データにおいて、ワーク搬送ロボットを構成するロボット部分が到達不可能な到達不可能領域を、ワーク搬送ロボットが配置される配置領域を構成する配置領域部分にロボット部分が干渉するか否かの干渉確認を行う干渉確認対象物から除外する前処理を行うとともに、前処理により到達不可能領域を干渉確認対象物から除外した統合データを用いて干渉確認を行う制御部を備える。これにより、上記第1の局面によるワーク搬送ロボットの干渉確認方法と同様に、干渉確認を行う前に、前処理により、統合データにおいて非到達領域を干渉確認対象物から除外して、統合データのデータ量を削減することができる。その結果、上記第1の局面によるワーク搬送ロボットの干渉確認方法と同様に、干渉確認を行う時間を短縮することができる。
【発明の効果】
【0010】
本開示によれば、上記のように、干渉確認を行う時間を短縮することが可能なワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ロボット
29日前
川崎重工業株式会社
作業設備
7日前
川崎重工業株式会社
搬送システム
7日前
川崎重工業株式会社
燃料供給設備
28日前
川崎重工業株式会社
液化ガス運搬船
28日前
川崎重工業株式会社
GHG排出量推定装置
29日前
川崎重工業株式会社
二酸化炭素分離システム
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
パレット及びロボットシステム
7日前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
6日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
13日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
28日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
28日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
9日前
川崎重工業株式会社
情報処理装置
21日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
29日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
29日前
川崎重工業株式会社
経路計画装置、運転支援システム、経路計画方法及び経路計画プログラム
9日前
川崎重工業株式会社
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
1日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
1か月前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
今日
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
21日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラム
1か月前
個人
超精密位置決め機構
今日
東レ株式会社
積層多孔質膜
3日前
株式会社潤工社
同軸ケーブル
28日前
株式会社ExH
電流開閉装置
1か月前
CKD株式会社
巻回装置
2日前
個人
鉄心用材料とその製造方法
1か月前
株式会社クオルテック
空気電池
1か月前
株式会社メルビル
ステージ
1か月前
エイブリック株式会社
半導体装置
1か月前
個人
マルチバンドコイルアンテナ
15日前
株式会社GSユアサ
蓄電装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ