TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025116168
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2025091882,2021136257
出願日
2025-06-02,2021-08-24
発明の名称
基板搬送ロボットおよび基板搬送ロボットの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250731BHJP(基本的電気素子)
要約
【課題】基板を搬送する際に、基板が干渉するのを抑制することが可能な基板搬送ロボットを提供する。
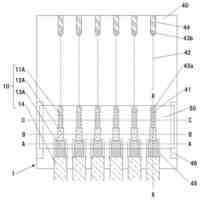
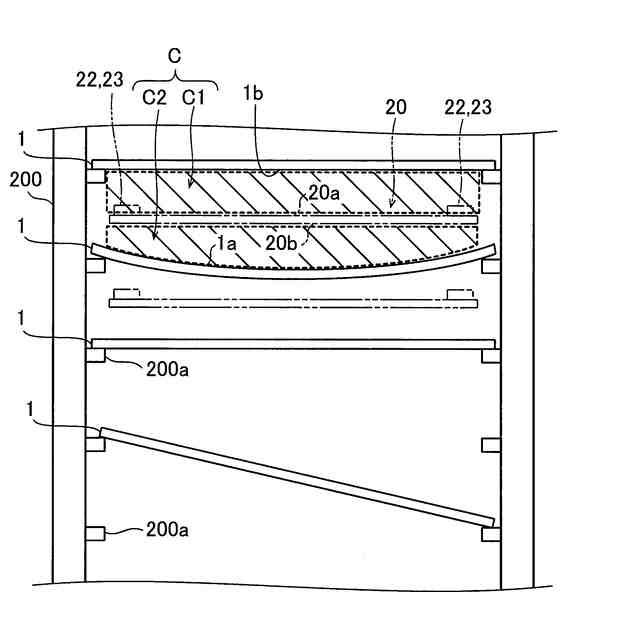
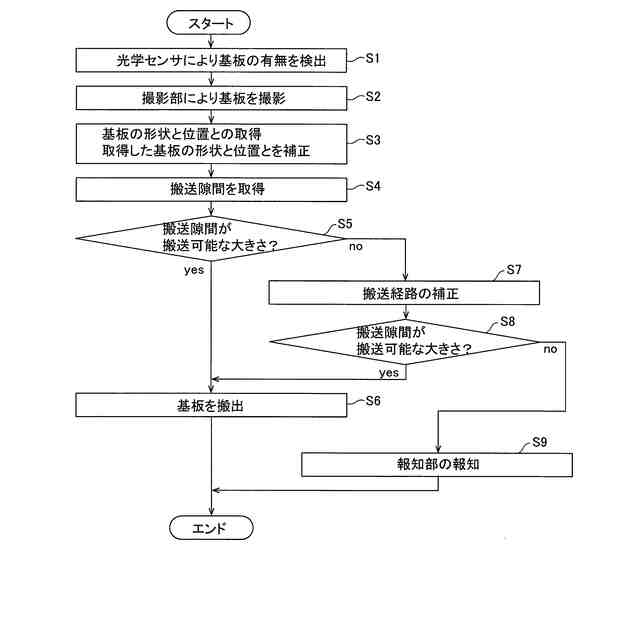
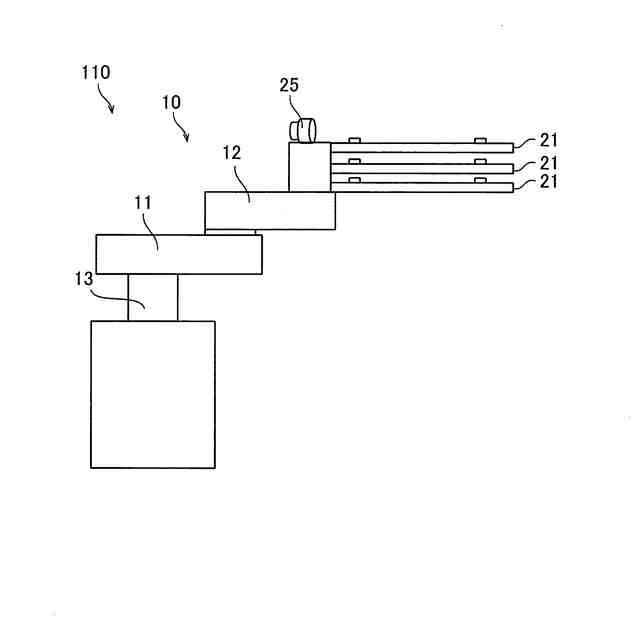
【解決手段】この基板搬送ロボット100では、制御部30は、撮影部25により撮影された画像に基づいて、収納部200内における基板保持ハンド20の位置と基板1との間の隙間と、基板保持ハンド20に搬送されている基板1と基板保持ハンド20に搬送されている基板1に隣り合う基板1との間の隙間と、収納部200に収納される基板1同士の間の隙間と、のうちの少なくとも一方を含む搬送隙間Cを取得する。制御部30は、取得した搬送隙間Cの大きさに基づいて、収納部200から基板1を搬出することと収納部200に基板1を搬入することとのうちの少なくとも一方を行うようにロボットアーム10および基板保持ハンド20の動作を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
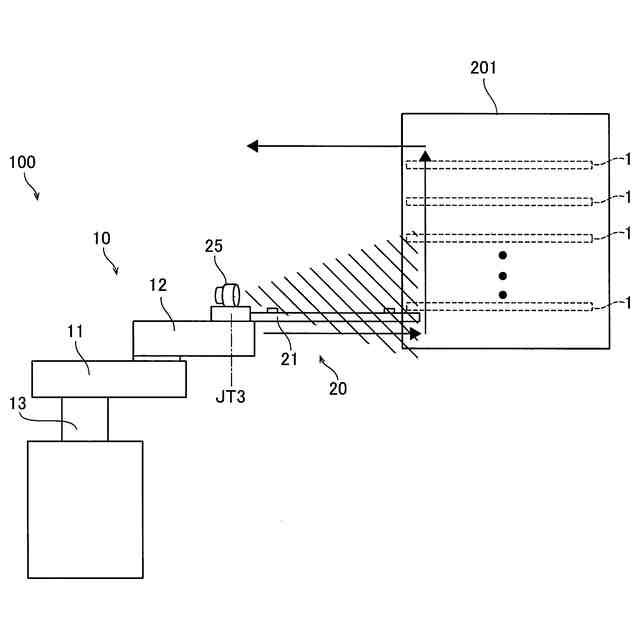
複数の基板を収納するための収納部から前記基板を搬出することと前記収納部に前記基板を搬入することとのうちの少なくとも一方を行う基板搬送ロボットであって、
ロボットアームと、
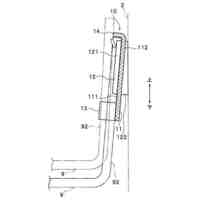
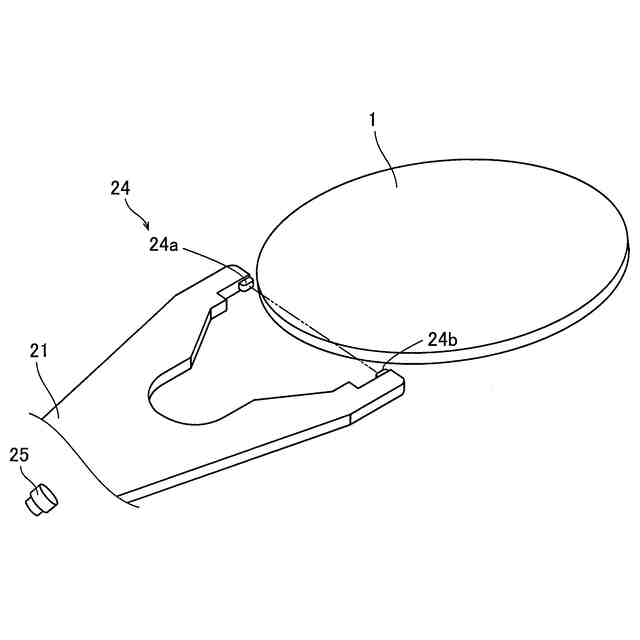
前記ロボットアームの先端に取り付けられ、前記基板を保持する基板保持ハンドと、
前記収納部に収納される前記複数の基板を撮影する撮影部と、
前記収納部に収納される前記複数の基板が配置されている配列方向に沿って移動し前記基板を検出する光学センサと、
制御部と、を備え、
前記制御部は、
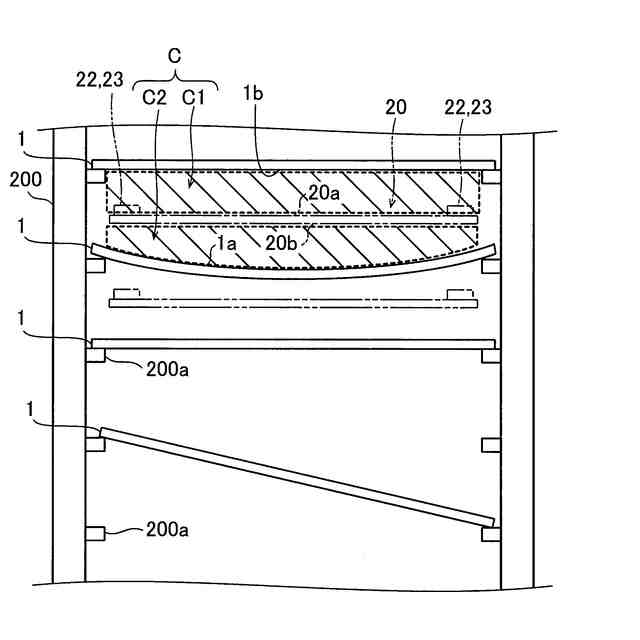
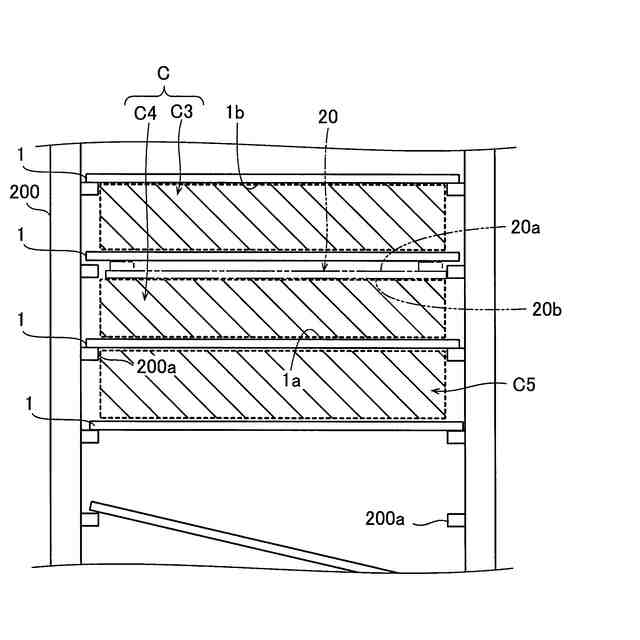
前記光学センサの検出結果と前記撮影部により撮影された画像とに基づいて、前記収納部内における前記基板保持ハンドの位置と前記基板との間の隙間と、前記基板保持ハンドによって搬送されている前記基板と前記基板保持ハンドに搬送されている前記基板に隣り合う前記基板との間の隙間と、前記収納部に収納される前記基板同士の間の隙間と、のうちの少なくとも1つを含む搬送隙間を取得し、
取得した前記搬送隙間の大きさに基づいて、前記収納部から前記基板を搬出することと前記収納部に前記基板を搬入することとのうちの少なくとも一方を行うように前記ロボットアームおよび前記基板保持ハンドの動作を制御する、基板搬送ロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記搬送隙間は、
前記収納部内における、前記基板保持ハンドの上面と、前記基板保持ハンドよりも上方に隣り合うように配置される前記基板の下面との間の隙間と、
前記収納部内における、前記基板保持ハンドの下面と、前記基板保持ハンドよりも下方に隣り合うように配置される前記基板の上面との間の隙間と、を含む、請求項1に記載の基板搬送ロボット。
【請求項3】
前記制御部は、
前記撮影部により撮影された画像に基づいて、前記基板の形状と位置との少なくとも一方を取得し、前記搬送隙間の大きさを取得する、請求項1または2に記載の基板搬送ロボット。
【請求項4】
前記制御部は、
前記撮影部により撮影された画像に基づいて取得された前記基板の形状と位置との少なくとも一方を、前記光学センサの検出結果に基づいて補正する、請求項3に記載の基板搬送ロボット。
【請求項5】
前記制御部は、前記光学センサにより前記基板が検出された位置において、前記複数の基板を撮影するように前記撮影部を制御する、請求項4に記載の基板搬送ロボット。
【請求項6】
前記撮影部は、前記ロボットアームまたは前記基板保持ハンドに配置され、
前記光学センサは、前記基板保持ハンドの先端に配置され、前記複数の基板が配置されている配列方向に沿って前記基板保持ハンドにより移動される、請求項4または5に記載の基板搬送ロボット。
【請求項7】
前記制御部は、予め教示された前記基板を搬送する際の前記基板保持ハンドの移動経路に基づいて、前記収納部内における前記基板保持ハンドの位置を取得する、請求項1~6のいずれか1項に記載の基板搬送ロボット。
【請求項8】
前記制御部は、検出した前記搬送隙間の大きさが、前記基板を搬送可能な大きさであると判定した場合、前記収納部から前記基板を搬出することと前記収納部に前記基板を搬入することとのうちの少なくとも一方を行うように前記ロボットアームおよび前記基板保持ハンドの動作を制御する、請求項1~7のいずれか1項に記載の基板搬送ロボット。
【請求項9】
前記制御部は、検出した前記搬送隙間の大きさが、前記基板を搬送可能な大きさではないと判定した場合、検出した前記搬送隙間の大きさに基づいて予め教示された前記基板の搬送経路を補正する、請求項1~8のいずれか1項に記載の基板搬送ロボット。
【請求項10】
報知部をさらに備え、
前記制御部は、予め教示された前記基板の前記搬送経路を補正しても、前記収納部から前記基板を搬出することと前記収納部に前記基板を搬入することとのうちの少なくとも一方ができないと判定した場合、前記基板の搬入と搬出とのうちの少なくとも一方ができないことを前記報知部に報知させる制御を行う、請求項9に記載の基板搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送ロボットおよび基板搬送ロボットの制御方法に関し、特に、基板を保持する基板保持ハンドを備える基板搬送ロボットおよび基板搬送ロボットの制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、基板を保持する基板保持ハンドを備える基板搬送ロボットが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、複数の基板が収納されたカセットから基板を搬出する基板搬送ロボットが開示されている。基板搬送ロボットは、予め教示されたティーチングデータに基づいて、ハンドによりカセットから基板を搬出する。また、上記特許文献1には、カセットに収納された複数の基板を撮影するカメラと、カメラにより撮影された画像を処理する制御部とが開示されている。そして、制御部は、カメラにより撮影された画像に基づいて、カセット内に配置された複数の基板の傾斜角度や湾曲状態などを取得する。制御部は、取得した基板の傾斜角度や湾曲状態などに基づいて、基板を搬出するためのティーチングデータを補正する。すなわち、取得した基板の傾斜角度や湾曲状態などに基づいて、カセットに侵入するハンドの移動経路や位置などが変更される。これにより、カセットにおいて基板が傾斜した状態で配置されている場合や、基板が湾曲している場合でも、カセットから基板を搬出することが可能になる。
【先行技術文献】
【特許文献】
【0004】
特許第6571475号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、カセットには複数の基板が所定の間隔を隔てて積層するように配置されている。このため、上記特許文献1のように、取得した基板の傾斜角度や湾曲状態などに基づいて、カセットに侵入するハンドの移動経路や位置などが変更された場合では、ハンドが、搬出対象となる基板に隣り合うように配置されている基板に干渉する場合がある。また、ハンドに搬送されている基板が、隣り合うように配置されている基板に干渉する場合がある。このため、基板を搬送する際に、基板が干渉するという問題点がある。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板を搬送する際に、基板が干渉するのを抑制することが可能な基板搬送ロボットおよび基板搬送ロボットの制御方法を提供することである。
【課題を解決するための手段】
【0007】
この開示の第1の局面による基板搬送ロボットは、複数の基板を収納するための収納部から基板を搬出することと収納部に基板を搬入することとのうちの少なくとも一方を行う基板搬送ロボットであって、ロボットアームと、ロボットアームの先端に取り付けられ、基板を保持する基板保持ハンドと、収納部に収納される複数の基板を撮影する撮影部と、収納部に収納される複数の基板が配置されている配列方向に沿って移動し基板を検出する光学センサと、制御部と、を備え、制御部は、光学センサの検出結果と撮影部により撮影された画像とに基づいて、収納部内における基板保持ハンドの位置と基板との間の隙間と、基板保持ハンドによって搬送されている基板と基板保持ハンドに搬送されている基板に隣り合う基板との間の隙間と、収納部に収納される基板同士の間の隙間と、のうちの少なくとも1つを含む搬送隙間を取得し、取得した搬送隙間の大きさに基づいて、収納部から基板を搬出することと収納部に基板を搬入することとのうちの少なくとも一方を行うようにロボットアームおよび基板保持ハンドの動作を制御する。
【0008】
この開示の第1の局面による基板搬送ロボットでは、上記のように、制御部は、撮影部により撮影された画像に基づいて、収納部内における基板保持ハンドの位置と基板との間の隙間と、基板保持ハンドによって搬送されている基板と基板保持ハンドに搬送されている基板に隣り合う基板との間の隙間と、収納部に収納される基板同士の間の隙間と、のうちの少なくとも1つを含む搬送隙間を取得し、取得した搬送隙間の大きさに基づいて、収納部から基板を搬出することと収納部に基板を搬入することとのうちの少なくとも一方を行うようにロボットアームおよび基板保持ハンドの動作を制御する。これにより、基板の傾斜角度や湾曲状態などに基づいて収納部に侵入する基板保持ハンドの移動経路や位置などを変更した場合でも、搬送隙間の大きさが不十分な場合には、収納部から基板を搬出すること、または、収納部に基板を搬入することを行わないように制御することができる。このため、基板保持ハンドが、搬出対象となる基板に隣り合うように配置されている基板に干渉することや、基板保持ハンドに搬送されている基板が、隣り合うように配置されている基板に干渉することを抑制することができる。その結果、基板を搬送する際に、基板が干渉するのを抑制することができる。
【0009】
また、収納部に収納されている基板の配列方向に沿って光学センサを移動させて基板の位置などを検出して搬送隙間を取得することも可能である。一方、この場合では、光学センサが基板の一方側端部などの一部のみを検出するので、基板の中央部および他方側端部における搬送隙間を正確に取得することが困難である。そこで、上記のように撮影部により撮影された画像に基づいて搬送隙間を取得することにより、基板の一方側端部だけでなく中央部および他方側端部における搬送隙間を取得することができる。その結果、基板を搬送する際に、基板が干渉するのを適切に抑制することができる。
【0010】
この開示の第2の局面による基板搬送ロボットの制御方法は、複数の基板を収納するための収納部から基板を搬出することと収納部に基板を搬入することとのうちの少なくとも一方を行う基板搬送ロボットの制御方法であって、撮影部により収納部に収納される複数の基板を撮影することと、収納部に収納される複数の基板が配置されている配列方向に沿って移動する光学センサにより基板を検出することと、光学センサの検出結果と撮影部により撮影された画像とに基づいて、収納部内における基板搬送ロボットの基板保持ハンドの位置と基板との間の隙間と、基板保持ハンドによって搬送されている基板と基板保持ハンドに搬送されている基板に隣り合う基板との間の隙間と、収納部に収納される基板同士の間の隙間と、のうちの少なくとも1つを含む搬送隙間を取得することと、取得した搬送隙間の大きさに基づいて、収納部から基板を搬出することと収納部に基板を搬入することとのうちの少なくとも一方を行うように基板搬送ロボットのロボットアームおよび基板保持ハンドの動作を制御すること、とを備える。なお、基板搬送ロボットの制御方法は、ティーチングデータや制御パラメータにより基板搬送ロボットに教示される方法を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
雄端子
今日
個人
後付地震遮断機
4日前
個人
超精密位置決め機構
5日前
東レ株式会社
積層多孔質膜
8日前
株式会社潤工社
同軸ケーブル
1か月前
CKD株式会社
巻回装置
7日前
エイブリック株式会社
半導体装置
1か月前
個人
マルチバンドコイルアンテナ
20日前
株式会社GSユアサ
蓄電素子
14日前
株式会社大阪ソーダ
複合固体電解質
14日前
株式会社GSユアサ
蓄電装置
11日前
矢崎総業株式会社
電線
15日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社ダイヘン
変圧器
26日前
日星電気株式会社
ケーブルアセンブリ
1か月前
住友電装株式会社
端子台
1か月前
日本特殊陶業株式会社
保持装置
7日前
日本特殊陶業株式会社
保持装置
12日前
日本化薬株式会社
電流遮断装置
5日前
ダイハツ工業株式会社
固定治具
14日前
オムロン株式会社
スイッチ装置
1か月前
東レエンジニアリング株式会社
実装装置
15日前
TOWA株式会社
製造装置
12日前
トヨタ自動車株式会社
電池パック
20日前
トヨタ自動車株式会社
電池パック
20日前
トヨタ自動車株式会社
電池パック
20日前
株式会社東芝
回路素子
6日前
ローム株式会社
チップ部品
18日前
ローム株式会社
チップ部品
18日前
ローム株式会社
チップ部品
1か月前
ローム株式会社
チップ部品
18日前
ローム株式会社
チップ部品
18日前
株式会社村田製作所
アンテナ装置
6日前
個人
“hi-light surf.”
13日前
三菱電機株式会社
半導体装置
7日前
太陽誘電株式会社
コイル部品
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ