TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025114222
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024008782
出願日
2024-01-24
発明の名称
把持装置および制御方法
出願人
ミネベアミツミ株式会社
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20250729BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】把持した対象物の脱落を防止する。
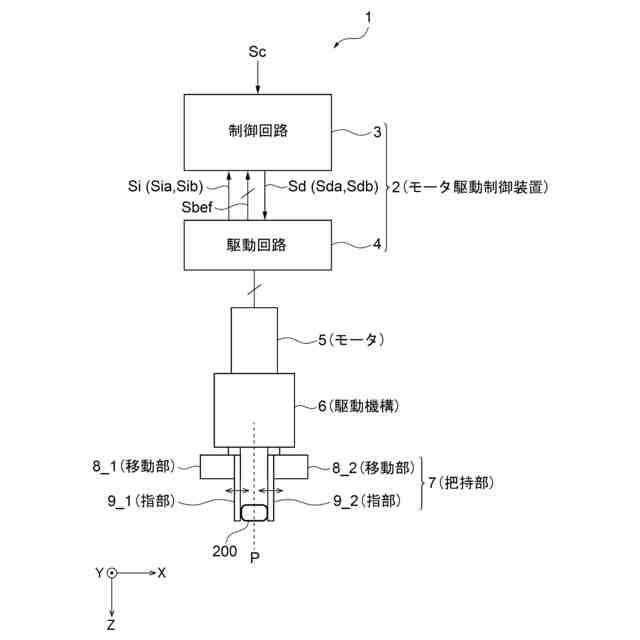
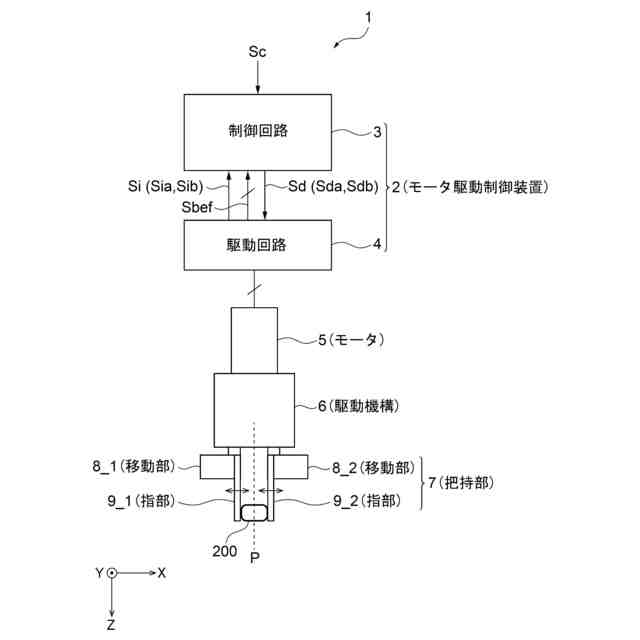
【解決手段】把持装置1は、対象物200を把持するための把持部7と、把持部7をモータ5の回転力に応じて駆動するとともに、モータ5の通電が停止した状態において把持部7の移動を制限するセルフロック機能を有する駆動機構6と、モータ5を駆動するモータ駆動制御装置2と、を備える。モータ駆動制御装置2は、把持部7の駆動を指示する情報を含む駆動指令信号Scが入力された場合に、把持部7が対象物200を把持するようにモータ5を駆動し、モータ5の脱調が検出された場合に、脱調の検出前にモータ5に供給した電流より小さい電流をモータ5に供給して、モータ5のロータ50を固定する。
【選択図】図1
特許請求の範囲
【請求項1】
モータと、
対象物を把持するための把持部と、
前記モータの回転力に応じて前記把持部を駆動するとともに、前記モータの通電が停止した状態において前記把持部の移動を制限するセルフロック機能を有する駆動機構と、
前記モータを駆動するモータ駆動制御装置と、を備え、
前記モータ駆動制御装置は、駆動制御信号に基づいて前記モータに電流を供給することにより前記モータを駆動する駆動回路と、駆動指令信号に基づいて前記駆動制御信号を生成する制御回路とを有し、
前記制御回路は、
前記駆動制御信号を生成する駆動制御信号生成部と、
前記モータの脱調を検出する脱調検出部と、を含み、
前記駆動制御信号生成部は、前記把持部の駆動を指示する情報を含む前記駆動指令信号が入力された場合に、前記把持部が前記対象物を把持するように前記把持部を駆動する前記駆動制御信号を生成し、前記脱調検出部によって前記モータの脱調が検出された場合に、前記モータのロータを固定するように、前記脱調の検出前に前記モータに供給した電流より小さい電流を前記モータに供給する前記駆動制御信号を生成する
把持装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の把持装置において、
前記モータは、2相のコイルを有するステッピングモータであって、
前記駆動制御信号生成部は、前記2相のコイルをともに励磁する2相励磁方式により前記駆動制御信号を生成することにより、前記ロータを固定する
把持装置。
【請求項3】
請求項2に記載の把持装置において、
前記駆動制御信号生成部は、前記脱調検出部によって前記脱調が検出された場合に、前記2相励磁方式により前記ロータを1ステップ分回転させた後に、前記ロータを固定する
把持装置。
【請求項4】
請求項1に記載の把持装置において、
前記制御回路は、
前記把持部による前記対象物の把持の有無を判定する把持判定部を更に有し、
前記駆動制御信号生成部は、
前記モータに供給する電流を測定する電流測定部と、
前記モータに供給する電流の基準となる電流基準値を第1値に設定し、前記脱調検出部によって前記脱調が検出された場合に前記電流基準値を前記第1値よりも小さい第2値に設定する電流基準値設定部と、
信号出力部と、を含み、
前記信号出力部は、前記電流測定部によって測定された電流が前記電流基準値を超えないように所定の周期のPWM信号を生成して前記駆動制御信号として出力し、
前記把持判定部は、前記ロータを固定するように前記駆動制御信号が生成されている状態において、1周期の前記PWM信号のデューティ比の、当該1周期より前の周期の前記PWM信号のデューティ比に対する変化量が閾値より大きい場合に、前記把持部による前記対象物の把持が解除されたと判定する
把持装置。
【請求項5】
請求項4に記載の把持装置において、
前記把持判定部は、
前記PWM信号のデューティ比を測定するデューティ比測定部と、
複数の前記周期における前記デューティ比の平均値を算出する平均デューティ比算出部と、
前記デューティ比の平均値と前記デューティ比との差分を算出する差分算出部と、
前記ロータを固定するように前記駆動制御信号が生成されている状態において、前記差分と前記閾値とを比較し、前記差分が前記閾値より大きい場合に、前記把持部による前記対象物の把持が解除されたと判定する判定部と、を含む
把持装置。
【請求項6】
モータと、対象物を把持するための把持部と、前記モータの回転力に応じて前記把持部を駆動するとともに、前記モータの通電が停止した状態において前記把持部が移動することを制限するセルフロック機能を有する駆動機構と、前記モータを駆動するモータ駆動制御装置とを備えた把持装置の制御方法であって、
前記把持部が前記対象物を把持するように前記モータを駆動する第1ステップと、
前記第1ステップによって前記モータを駆動しているときに、前記モータの脱調の有無を判定する第2ステップと、
前記第2ステップにおいて前記脱調が検出された場合に、前記第1ステップによって前記モータを駆動するときに前記モータに供給する電流より小さい電流を前記モータに供給することにより、前記モータのロータを固定する第3ステップと、を含む
制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持装置および制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
製造現場等では、機械部品や電子部品等の対象物(ワーク)を把持する電動グリッパ等の把持装置が用いられている。一般に、電動グリッパは、対象物を把持する把持部と、モータと、モータの回転力に応じて把持部を駆動する駆動機構とを備えている。
【0003】
近年、セルフロック機能を有する駆動機構を備えた電動グリッパが増えつつある。セルフロック機能は、モータの通電が停止した状態において把持部の移動を制限する機能である(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2020-104188号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の電動グリッパでは、セルフロック機能によって対象物を把持する力が時間の経過とともに低下し、対象物が把持部から脱落するおそれがある。
【0006】
本発明は、上述した課題に鑑みてなされたものであり、把持した対象物の脱落を防止することを目的とする。
【課題を解決するための手段】
【0007】
本発明の代表的な実施の形態に係る把持装置は、モータと、対象物を把持するための把持部と、前記モータの回転力に応じて前記把持部を駆動するとともに、前記モータの通電が停止した状態において前記把持部の移動を制限するセルフロック機能を有する駆動機構と、前記モータを駆動するモータ駆動制御装置と、を備え、前記モータ駆動制御装置は、駆動制御信号に基づいて前記モータに電流を供給することにより前記モータを駆動する駆動回路と、駆動指令信号に基づいて前記駆動制御信号を生成する制御回路とを有し、前記制御回路は、前記駆動制御信号を生成する駆動制御信号生成部と、前記モータの脱調を検出する脱調検出部と、を含み、前記駆動制御信号生成部は、前記把持部の駆動を指示する情報を含む前記駆動指令信号が入力された場合に、前記把持部が前記対象物を把持するように前記把持部を駆動する前記駆動制御信号を生成し、前記脱調検出部によって前記モータの脱調が検出された場合に、前記モータのロータを固定するように、前記脱調の検出前に前記モータに供給した電流より小さい電流を前記モータに供給する前記駆動制御信号を生成することを特徴とする。
【発明の効果】
【0008】
本発明に係る把持装置によれば、把持した対象物の脱落を防止することが可能となる。
【図面の簡単な説明】
【0009】
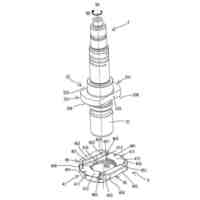
実施の形態に係る把持装置の構成を模式的に示す図である。
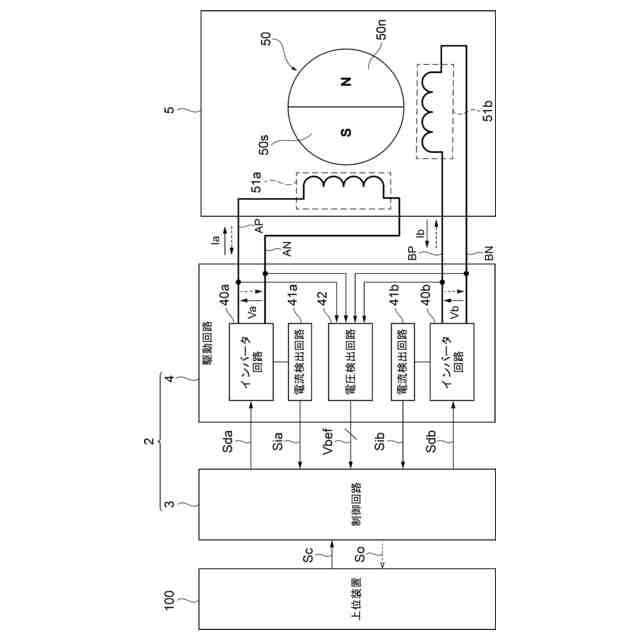
実施の形態に係る把持装置におけるモータおよびモータ駆動制御装置の構成を模式的に示す図である。
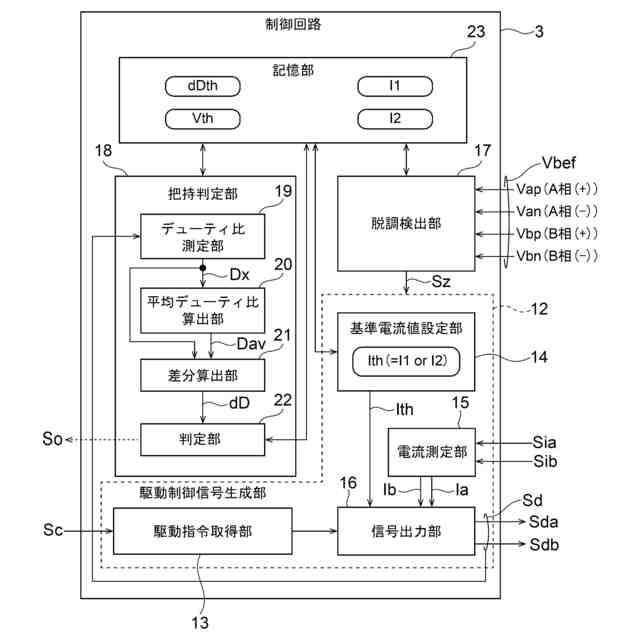
実施の形態に係る把持装置における制御回路の構成を示すブロック図である。
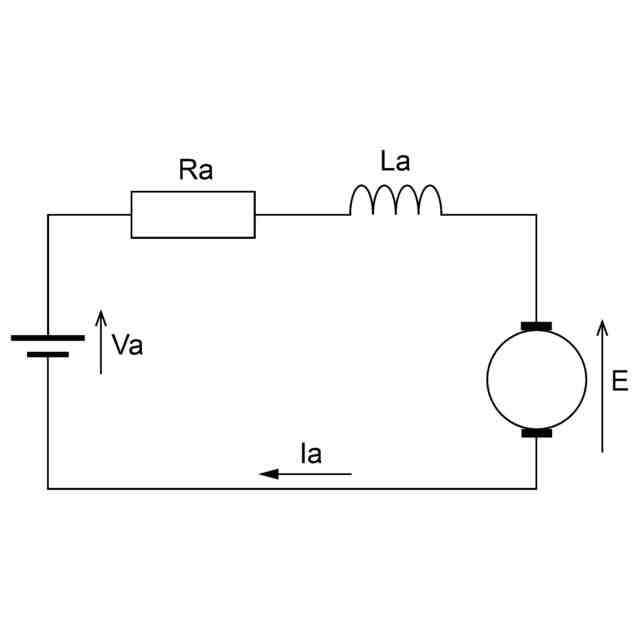
モータのロータを固定させたときのモータの周辺の等価回路を示す図である。
実施の形態に把持装置によって対象物を把持するときのモータ駆動制御装置による処理の流れを示すフローチャートである。
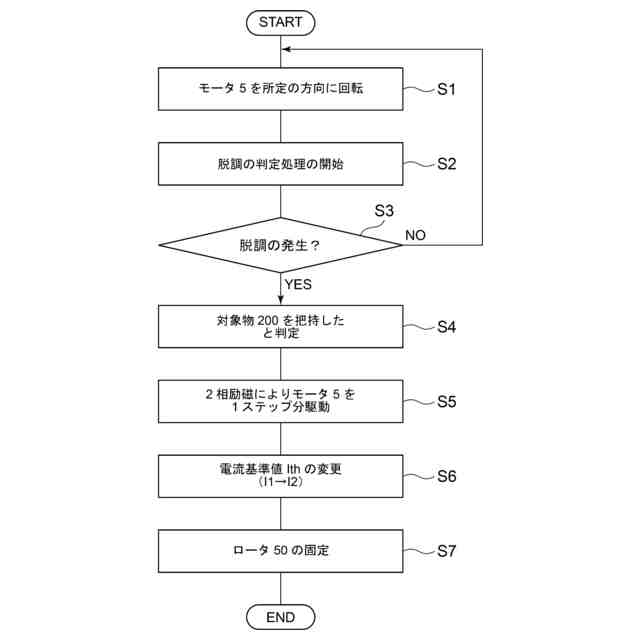
実施の形態に把持装置によって対象物を把持した後のモータ駆動制御装置による処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態の具体例について図を参照して説明する。なお、以下の説明において、各実施の形態において共通する構成要素には同一の参照符号を付し、繰り返しの説明を省略する。また、図面は模式的なものであり、各要素の寸法の関係、各要素の比率などは、現実と異なる場合があることに留意する必要がある。図面の相互間においても、互いの寸法の関係や比率が異なる部分が含まれている場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
28日前
川崎重工業株式会社
ロボット
29日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
29日前
オークラ輸送機株式会社
ハンド装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
積水ハウス株式会社
フィルム除去具
1日前
株式会社不二越
協働ロボットシステム
6日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
10日前
株式会社ジャノメ
ロボット
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
コネクテッドロボティクス株式会社
保持システム
3日前
セイコーエプソン株式会社
ロボット
1か月前
川崎重工業株式会社
作業設備
7日前
株式会社マキタ
打撃工具
6日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
打撃工具
10日前
工機ホールディングス株式会社
集塵装置及び作業機
28日前
株式会社マキタ
回転工具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ