TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025114359
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024009012
出願日
2024-01-24
発明の名称
ロボット制御装置及びロボット制御方法
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
9/10 20060101AFI20250729BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの駆動精度をより高めるロボット制御装置及びロボット制御方法を提供する。
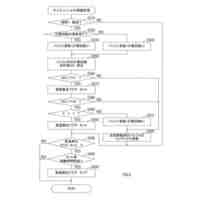
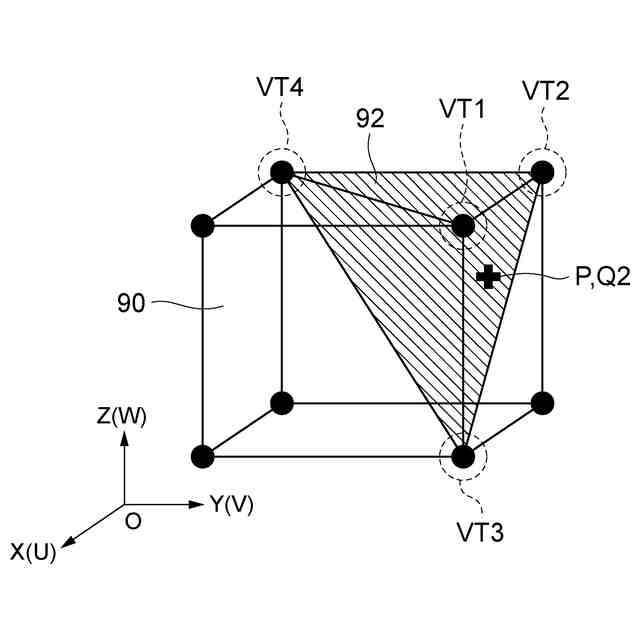
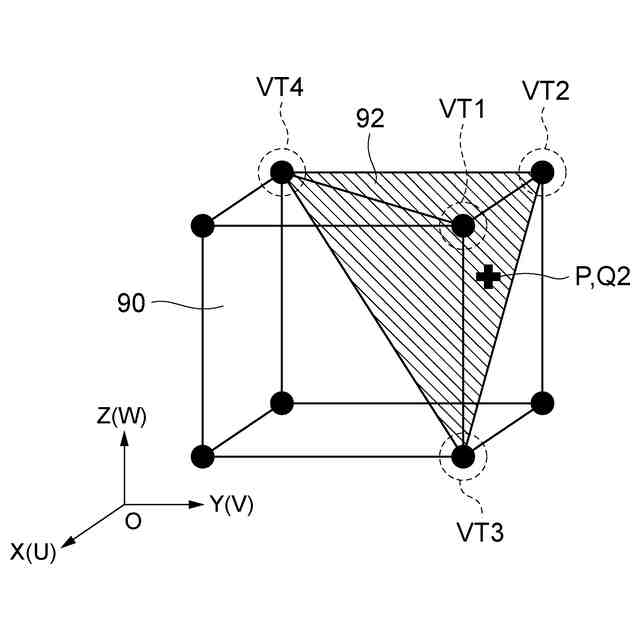
【解決手段】ロボット制御装置(14)のプロセッサ(36)は、ロボット座標空間上の複数の標本点の中から、対象点(P,Q2)を包含する四面体(92)をなす四つの頂点(VT1~VT4)を選択する選択処理(SP16a)と、四つの頂点(VT1~VT4)に対応する四組のデータセットを用いた補間演算又は近似演算により、対象点(P,Q2)における演算特徴量を算出する演算処理(SP16b)と、演算特徴量に基づいてロボット(14)の駆動制御に用いられる制御量を決定する決定処理(SP18)と、を実行する。
【選択図】図5
特許請求の範囲
【請求項1】
一つ以上のプロセッサを備え、
前記一つ以上のプロセッサは、
三次元座標空間上の標本点に対応する座標値及び特徴量のデータセットから構成され、かつ前記特徴量の位置分布を示す特徴量マップを取得する取得処理と、
前記取得処理を通じて取得された前記特徴量マップを構成する複数の標本点の中から、前記三次元座標空間上の対象点を包含する四面体をなす四つの頂点を、予め定められた選択規則に従って選択する選択処理と、
前記選択処理を通じて選択された前記四つの頂点に対応する四組の前記データセットを用いた補間演算又は近似演算により、前記対象点における演算特徴量を算出する演算処理と、
前記演算処理を通じて算出された前記演算特徴量に基づいて、ロボットの駆動制御に用いられる制御量を決定する決定処理と、
を実行することを特徴とするロボット制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記選択規則は、前記四面体の体積が最小になることを特徴とする請求項1に記載のロボット制御装置。
【請求項3】
前記選択規則は、前記ロボット座標空間をなす一軸上の位置のばらつきが最小になることを特徴とする請求項1に記載のロボット制御装置。
【請求項4】
前記近似演算は、前記四組のデータセットから三次元線形変換行列を求める演算と、前記対象点の座標値に前記三次元線形変換行列を作用する演算と、を含むことを特徴とする請求項1に記載のロボット制御装置。
【請求項5】
前記三次元座標空間は、実座標空間であり、
前記特徴量は、前記駆動制御に用いられるロボット座標空間上の、前記標本点に対応する位置を示す座標値であり、
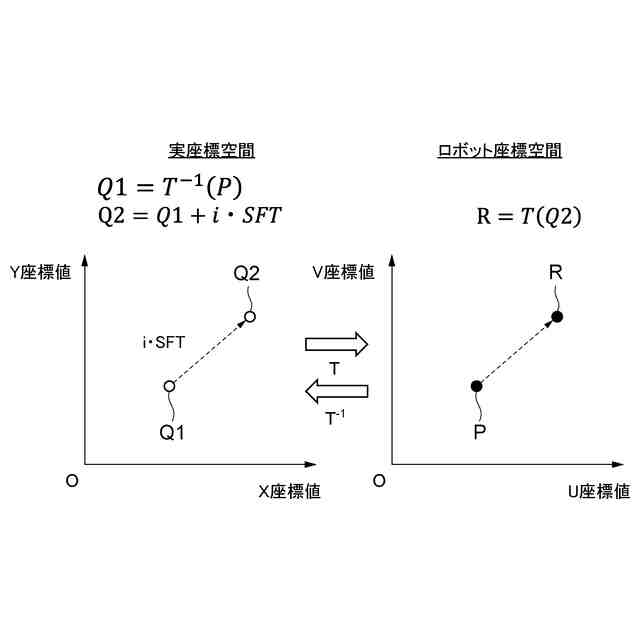
前記対象点は、前記実座標空間上にある第一点からシフト量だけ移動した第二点を含み、
前記演算特徴量は、前記第一点に対応する前記ロボット座標空間上の位置を示す第一座標値、又は前記第二点に対応する前記ロボット座標空間上の位置を示す第二座標値を含み、
前記決定処理は、前記第一座標値又は前記第二座標値に基づいて前記制御量を決定することを特徴とする請求項1に記載のロボット制御装置。
【請求項6】
前記三次元座標空間は、前記駆動制御に用いられるロボット座標空間であり、
前記特徴量は、実座標空間上における位置ずれを示すずれ量又は前記位置ずれの補正量であり、
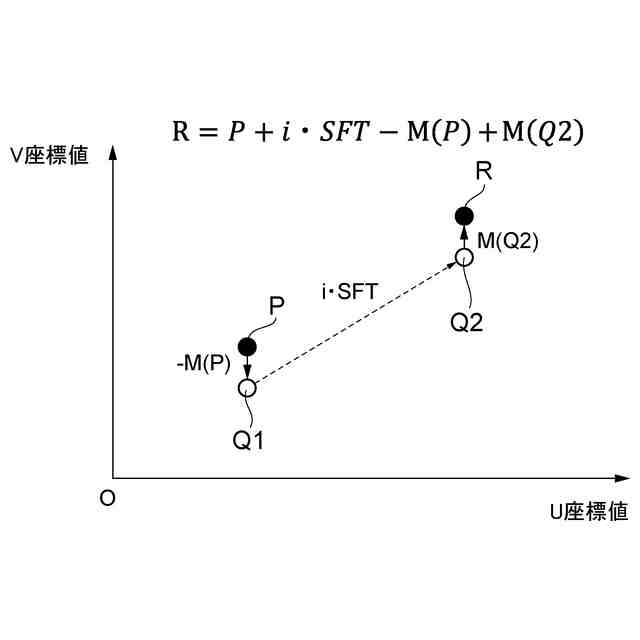
前記対象点は、前記ロボット座標空間上にある第一点からシフト量だけ移動した第二点を含み、
前記演算特徴量は、前記第一点に対応する前記ずれ量又は前記補正量である第一特徴量、又は前記第二点に対応する前記ずれ量又は前記補正量である第二特徴量を含み、
前記決定処理は、前記第一点の第一座標値に対して、前記第一特徴量と前記第二特徴量との差分量を加算又は減算し、かつ前記シフト量を加算して求められる前記第二点の第二座標値に基づいて、前記制御量を決定することを特徴とする請求項1に記載のロボット制御装置。
【請求項7】
三次元座標空間上の標本点に対応する座標値及び特徴量のデータセットから構成され、かつ前記特徴量の位置分布を示す特徴量マップを取得する取得ステップと、
取得された前記特徴量マップを構成する複数の標本点の中から、前記三次元座標空間上の対象点を包含する四面体をなす四つの頂点を、予め定められた選択規則に従って選択する選択ステップと、
選択された前記四つの頂点に対応する四組の前記データセットを用いた補間演算又は近似演算により、前記対象点における演算特徴量を算出する演算ステップと、
算出された前記演算特徴量に基づいて、ロボットの駆動制御に用いられる制御量を決定する決定ステップと、
を一つ又は複数のコンピュータが実行することを特徴とするロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの駆動制御を行うロボット制御装置及びロボット制御方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
例えば、産業用ロボットの技術分野において、ロボットの位置決め精度を高めるための様々な駆動制御技術が提案されている。
【0003】
特許文献1に、ロボット座標空間上における測定ずれ量の位置分布を用いて、ロボットの目的位置を補正する補正方法が開示されている。また、この補正方法では、位置分布を構成する標本点(あるいは、ブロック)が直方格子状に配置されるとともに、線形補間演算を用いて補正量が算出される。
【先行技術文献】
【特許文献】
【0004】
特許第6705017号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、特許文献1のように、標本点が直方格子状に配置されている場合、目的位置(あるいは、対象点)の近傍にある八点の標本点から離れた位置、具体的には、直方格子の重心近傍の位置では、補間演算に起因する演算誤差が生じやすい傾向がある。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、ロボットの駆動精度をより高めるロボット制御装置及びロボット制御方法を提供することにある。
【課題を解決するための手段】
【0007】
本発明におけるロボット制御装置は、一つ以上のプロセッサを備え、前記一つ以上のプロセッサは、三次元座標空間上の標本点に対応する座標値及び特徴量のデータセットから構成され、かつ前記特徴量の位置分布を示す特徴量マップを取得する取得処理と、前記取得処理を通じて取得された前記特徴量マップを構成する複数の標本点の中から、前記三次元座標空間上の対象点を包含する四面体をなす四つの頂点を、予め定められた選択規則に従って選択する選択処理と、前記選択処理を通じて選択された前記四つの頂点に対応する四組の前記データセットを用いた補間演算又は近似演算により、前記対象点における演算特徴量を算出する演算処理と、前記演算処理を通じて算出された前記演算特徴量に基づいて、ロボットの駆動制御に用いられる制御量を決定する決定処理と、を実行する。
【0008】
また、前記選択規則は、前記四面体の体積が最小になることであってもよい。
【0009】
また、前記選択規則は、前記ロボット座標空間をなす一軸上の位置のばらつきが最小になることであってもよい。
【0010】
また、前記近似演算は、前記四組のデータセットから三次元線形変換行列を求める演算と、前記対象点の座標値に前記三次元線形変換行列を作用する演算と、を含んでもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
折りたたみ工具
1か月前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
9日前
株式会社竹中工務店
補助セット
8日前
株式会社不二越
ロボット
8日前
株式会社三協システム
移載装置
29日前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボット操作装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
SMC株式会社
着脱装置
1か月前
株式会社ミクロブ
把持装置
1か月前
トヨタ自動車株式会社
ロボット
3日前
株式会社不二越
移動ロボットシステム
11日前
株式会社不二越
ロボットシステム
29日前
本田技研工業株式会社
装置
14日前
株式会社不二越
エッジ仕上げ装置
21日前
株式会社不二越
ロボットシステム
1か月前
トヨタ自動車株式会社
軌道生成装置
3日前
トヨタ自動車株式会社
歩行ロボット
1か月前
株式会社不二越
垂直多関節ロボット
22日前
シンフォニアテクノロジー株式会社
搬送装置
11日前
ライオン株式会社
移載システム
23日前
アネックスツール株式会社
ドライバービット
7日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
株式会社マキタ
回転打撃工具
3日前
ワールド技研株式会社
ロボットセル装置
8日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
21日前
セイコーエプソン株式会社
ロボット
1か月前
NTN株式会社
ハンド
9日前
シヤチハタ株式会社
マーキング装置
1か月前
シヤチハタ株式会社
マーキング装置
1か月前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
7日前
セイコーエプソン株式会社
ロボット
1か月前
トヨタ自動車株式会社
ロボットの制御装置
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ