TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117070
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011742
出願日
2024-01-30
発明の名称
ピックアップ方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250804BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ピックアップ作業を簡易な構成により実現し、ピックアップ作業を自動化するためのコストの増大を抑制する。
【解決手段】ロボットが保持する治具を利用して、凹部を有する対象物をピックアップするピックアップ方法であって、ロボットが、凹部に治具を挿入する挿入ステップと、ロボットが有する力センサを利用して、凹部に対する治具の挿入の終点を検知する終点検知ステップと、ロボットが、凹部に対する治具の挿入方向と逆方向に治具を移動させることにより、対象物をピックアップするピックアップステップと、を含む。
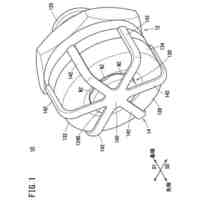
【選択図】図1
特許請求の範囲
【請求項1】
ロボットが保持する治具を利用して、凹部を有する対象物をピックアップするピックアップ方法であって、
前記ロボットが、前記凹部に前記治具を挿入する挿入ステップと、
前記ロボットが有する力センサを利用して、前記凹部に対する前記治具の挿入の終点を検知する終点検知ステップと、
前記ロボットが、前記凹部に対する前記治具の挿入方向と逆方向に前記治具を移動させることにより、前記対象物をピックアップするピックアップステップと、
を含む、
ピックアップ方法。
続きを表示(約 280 文字)
【請求項2】
請求項1に記載のピックアップ方法であって、
前記治具のうち、前記凹部に挿入される部分である挿入部は、前記治具の先端側から基端側に向かって外径が大きくなるテーパ状に形成されている、
ピックアップ方法。
【請求項3】
請求項1または請求項2に記載のピックアップ方法であって、
前記対象物は、樹脂を主材料としている、
ピックアップ方法。
【請求項4】
請求項1または請求項2に記載のピックアップ方法であって、
前記治具は、ピペットである、
ピックアップ方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ピックアップ方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、人間の作業者が行っていた実験・研究に係る作業を、ロボットを用いて自動化するラボオートメーションが知られている。ラボオートメーションによる自動化が望まれる作業には、例えば、所定量の液体試薬をピペットにより取り集める分注作業がある。分注作業においては、予めチップボックスに配列されたチップをピペットの先端に装着するために、チップボックスからチップをピックアップする作業が発生する。このようなピックアップ作業を自動化するために、例えば、特許文献1に記載のロボットハンドが用いられる。
【先行技術文献】
【特許文献】
【0003】
特開2023-130116号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のロボットハンドの構成は複雑であり、ピックアップ作業を自動化するためのコストが増大するという問題がある。なお、かかる問題は、ピペットに装着されるチップのピックアップに限定されず、種々の物体のピックアップにおいても同様である。
【課題を解決するための手段】
【0005】
(1)本開示の第1の形態によれば、ロボットが保持する治具を利用して、凹部を有する対象物をピックアップするピックアップ方法が提供される。このピックアップ方法は、前記ロボットが、前記凹部に前記治具を挿入する挿入ステップと、前記ロボットが有する力センサを利用して、前記凹部に対する前記治具の挿入の終点を検知する終点検知ステップと、前記ロボットが、前記凹部に対する前記治具の挿入方向と逆方向に前記治具を移動させることにより、前記対象物をピックアップするピックアップステップと、を含む。
【図面の簡単な説明】
【0006】
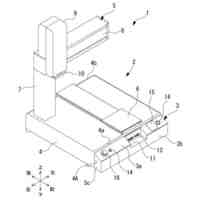
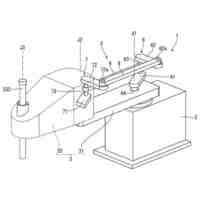
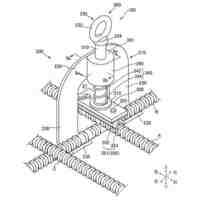
本実施形態における分注装置の概略構成を示す説明図である。
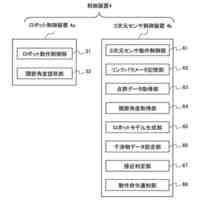
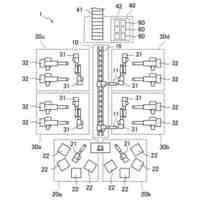
本実施形態における分注装置の概略構成を示すブロック図である。
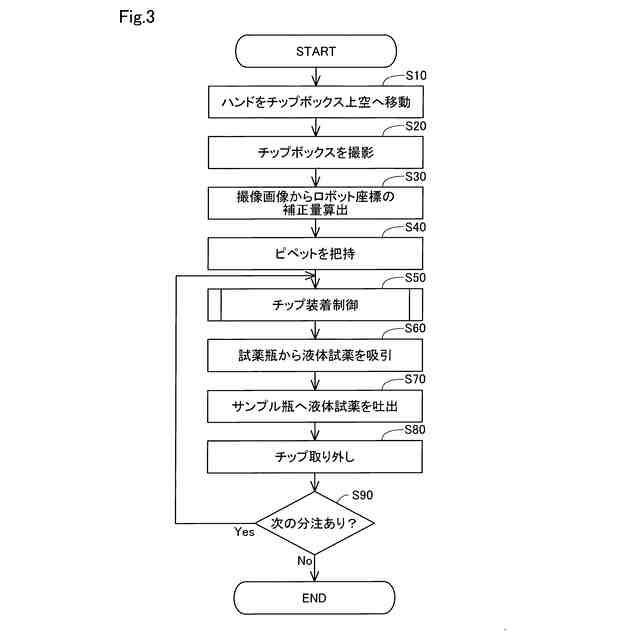
本実施形態における分注制御の手順を示すフローチャートである。
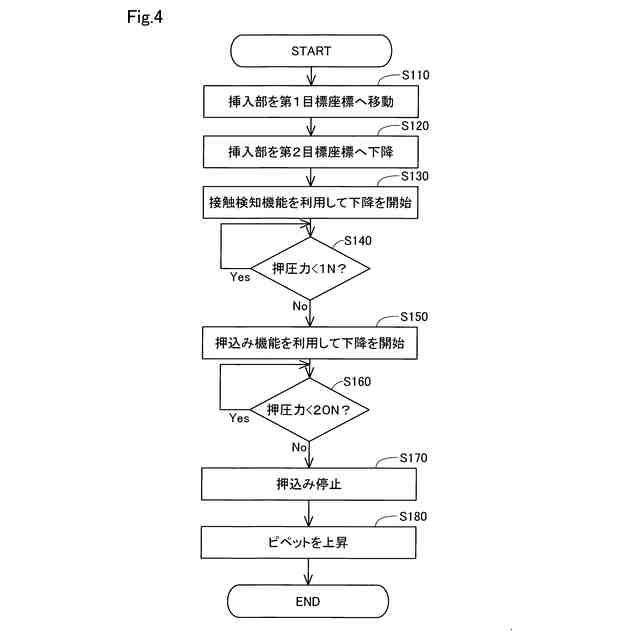
本実施形態におけるチップ装着制御の手順を示すフローチャートである。
他の実施形態におけるピックアップ方法を示す説明図である。
【発明を実施するための形態】
【0007】
A.実施形態:
A-1:装置構成:
図1は、本実施形態における分注装置100の概略構成を示す説明図である。図2は、本実施形態における分注装置100の概略構成を示すブロック図である。図1には、互いに直交するX軸、Y軸およびZ軸が描かれている。X軸およびY軸は水平方向に対応し、Z軸は鉛直方向に対応する。なお、「X軸方向」とは、+X方向と-X方向とを合わせた概念を意味する。同様に、「Y軸方向」とは、+Y方向と-Y方向とを合わせた概念を意味し、「Z軸方向」とは、+Z方向と-Z方向とを合わせた概念を意味する。また、以下の説明において、+Z方向を「上方」とも呼び、-Z方向を「下方」とも呼ぶ。
【0008】
分注装置100は、分注を行うための装置、より具体的には、ユーザーにより指定された種類の液体試薬Lの入った試薬瓶B1から液体試薬Lを吸入し、指定された量の液体試薬Lをサンプル瓶B2に吐出するための装置である。なお、図1では、液体試薬Lの入った試薬瓶B1のみが図示されているが、分注装置100は、単一種類の試薬の分注に限らず、複数種類の液体試薬を複数の試薬瓶からサンプル瓶B2に分注することも行う。図1に示すように、分注装置100は、ピペット10と、チップ20と、重量計30と、ロボット40と、ロボット制御装置50と、カメラ60と、入力部70と、表示部80と、制御装置90とを備える。また、図2に示すように、ピペット10と、重量計30と、ロボット制御装置50と、カメラ60と、入力部70と、表示部80、制御装置90とは、電気的に互いに接続されている。なお、図1では、図示の都合上、表示部80と、ピペット10、チップ20、重量計30およびカメラ60との電気的な接続は省略されている。
【0009】
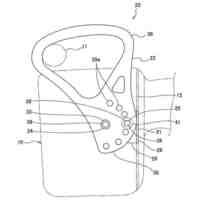
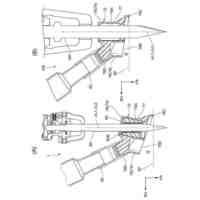
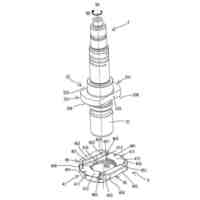
ピペット10は、図1に示すように、ピペット10の先端部分である挿入部11にチップ20を装着して使用される。本実施形態では、挿入部11は、先端側である-Z方向から基端側である+Z方向に向かって外径が大きくなるテーパ状に形成されている。このように挿入部11を形成することにより、チップ20への挿入部11の挿入を容易にできる。
【0010】
ピペット10は、液体が貯留された試薬瓶B1から液体試薬Lを吸入し、吸入した液体試薬Lをサンプル瓶B2へ吐出する。液体試薬Lは、ピペット10によって吸入および吐出可能であれば、その種類は、特に限定されない。ピペット10は、図示しない駆動部の駆動により、所定体積の液体試薬Lを吸入および吐出することができる。ピペット10による液体試薬Lの吸入および吐出は、制御装置90によって制御される。ピペット10は、例えば、マイクロピペットである。ピペット10としては、液体試薬Lの吸入および吐出が可能である任意のピペット10を利用可能である。また、本実施形態では、チップ20は、樹脂を主材料として形成されている。なお、チップ20は、樹脂に限らずガラス等の他の材料を用いて形成されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
ホシデン株式会社
分解用治具
1か月前
積水ハウス株式会社
フィルム除去具
7日前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
12日前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社ジャノメ
ロボット
2か月前
株式会社不二越
ロボットシステム
1日前
株式会社清水製作所
電動工具の吊下げ具
16日前
SMC株式会社
ベルヌーイグリッパ
1か月前
コネクテッドロボティクス株式会社
保持システム
9日前
セイコーエプソン株式会社
ロボット
1か月前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
川崎重工業株式会社
作業設備
13日前
株式会社マキタ
打撃工具
16日前
北越メタル株式会社
鉄筋保持具
12日前
株式会社マキタ
回転工具
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ