TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117485
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024012358
出願日
2024-01-30
発明の名称
作業システム及び作業部材
出願人
コネクテッドロボティクス株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250804BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業部材から対象物をより効率的に剥離させる。
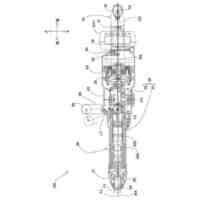
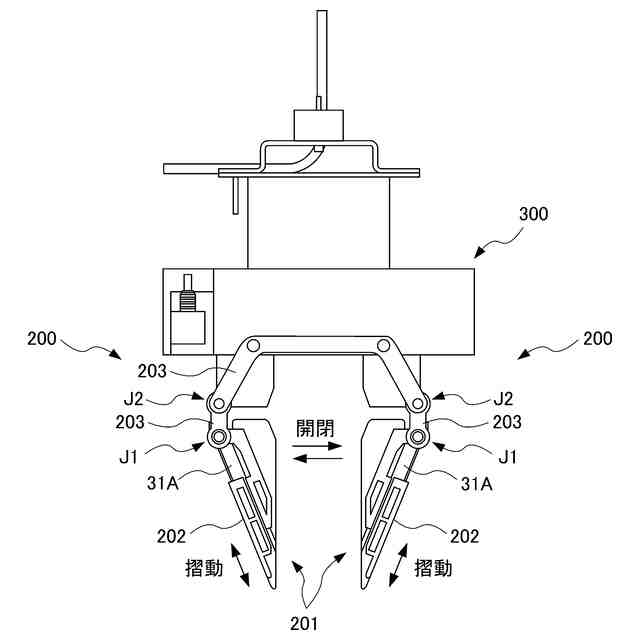
【解決手段】把持システム1は、ハンドユニット31と、把持部材31A(作業部材)と、スクレーパー201,202(移動部材)と、駆動機構300(移動手段)と、を備える。ハンドユニット31は、作業に使用される。駆動機構300は、ハンドユニット31(把持部材31A)を作業のために移動させる。把持部材31Aは、スクレーパー201,202を備える。スクレーパー201,202は、駆動機構300が把持部材31Aを移動させることに従動して、作業において対象物(具材等)と接触する接触面に沿って移動する。
【選択図】図3
特許請求の範囲
【請求項1】
作業に使用される作業部材と、
前記作業部材を前記作業のために移動させる移動手段と、
を備え、
前記作業部材は、
前記移動手段が前記作業部材を移動させることに従動して、前記作業において対象物と接触する接触面に沿って移動する移動部材を備えることを特徴とする作業システム。
続きを表示(約 1,100 文字)
【請求項2】
前記作業部材の前記作業のための移動から独立した固定点と、前記移動部材とが連結部材によって連結され、
前記固定点に対する前記連結部材の回転に応じて、前記移動部材が前記作業部材の接触面に沿って移動することを特徴とする請求項1に記載の作業システム。
【請求項3】
前記移動部材の移動方向に弾性力を付与する弾性部材を備え、
前記弾性部材の弾性力によって、前記移動部材を前記作業部材の接触面に沿って移動させることを特徴とする請求項1または2に記載の作業システム。
【請求項4】
前記移動部材は、前記作業部材に対する移動方向において、間隔を空けて配置された接触部を有し、
前記移動手段が前記作業部材を移動させることに従動して、前記移動部材が前記接触部の配置間隔以上に移動することを特徴とする請求項1または2に記載の作業システム。
【請求項5】
前記移動部材の前記作業部材と接触する部分の少なくとも一部は、前記接触面と垂直な平面における断面形状が円形であることを特徴とする請求項1または2に記載の作業システム。
【請求項6】
前記移動部材の前記作業部材と接触する部分の少なくとも一部は、前記接触面と垂直な平面における断面形状に楔形の部分を有することを特徴とする請求項1または2に記載の作業システム。
【請求項7】
前記移動部材は、前記作業部材が前記作業のために移動する工程において、下方への移動及び上方への移動を行うことを特徴とする請求項1または2に記載の作業システム。
【請求項8】
前記移動部材は、前記作業部材が作業を行う場合に作業領域に面する正面側に対し、反対側において片持ち状態で支持されていることを特徴とする請求項1または2に記載の作業システム。
【請求項9】
前記移動部材は、鉛直方向に沿って移動可能な支持部材に支持され、
前記支持部材は、弾性部材によって上方に付勢され、または、外力によって上方に移動され、
前記作業部材が鉛直方向に沿って移動される動作で前記支持部材が押し下げられると、前記移動部材が前記作業部材の接触面に沿って移動することを特徴とする請求項1または2に記載の作業システム。
【請求項10】
前記移動部材は、鉛直方向に沿って移動可能な連結部に連結されると共に、当該連結部との水平方向の距離が保持される構造を有し、
前記作業部材が水平方向に移動することに従動して、前記連結部が鉛直方向に沿って移動することにより、前記移動部材が前記作業部材の接触面に沿って移動することを特徴とする請求項1または2に記載の作業システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業システム及び作業部材に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
近年、様々な分野において、ロボットの導入が進められている。従来からロボットが用いられている工業製品の製造分野はもちろんのことながら、例えば、食品の盛り付けを行う分野等でもロボットの導入が進められている。
また、このような盛り付けを行うロボットに関する技術の一例が、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6645774号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットによって対象物を把持する作業を行うシステムでは、把持部材等の作業部材によって食品等の対象物を把持している。
このような作業部材を用いる場合、対象物が作業部材に粘着することにより、正確な量を取り出すことができない、あるいは、作業部材に無用な対象物が残る等の不具合が生じ得る。
これに対し、特許文献1に記載された技術では、把持部材(指リンク)に沿って移動する押出板を備え、押出板を指リンクに沿って直動駆動させることで、把持部材に付着した対象物を解放することとしている。
しかしながら、特許文献1に記載された技術では、押出板を直動駆動するためのアクチュエータや電源が必要となる。即ち、特許文献1に記載された技術においては、対象物の剥離のために特別な装置を設置し、剥離を行う際には、この装置を逐次駆動する必要がある。そのため、特許文献1に記載された技術では、作業部材から対象物を効率的に剥離させることができない。
【0005】
本発明の課題は、作業部材から対象物をより効率的に剥離させることである。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一実施形態に係る作業システムは、
作業に使用される作業部材と、
前記作業部材を前記作業のために移動させる移動手段と、
を備え、
前記作業部材は、
前記移動手段が前記作業部材を移動させることに従動して、前記作業において対象物と接触する接触面に沿って移動する移動部材を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、作業部材から対象物をより効率的に剥離させることができる。
【図面の簡単な説明】
【0008】
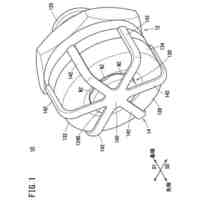
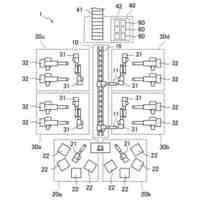
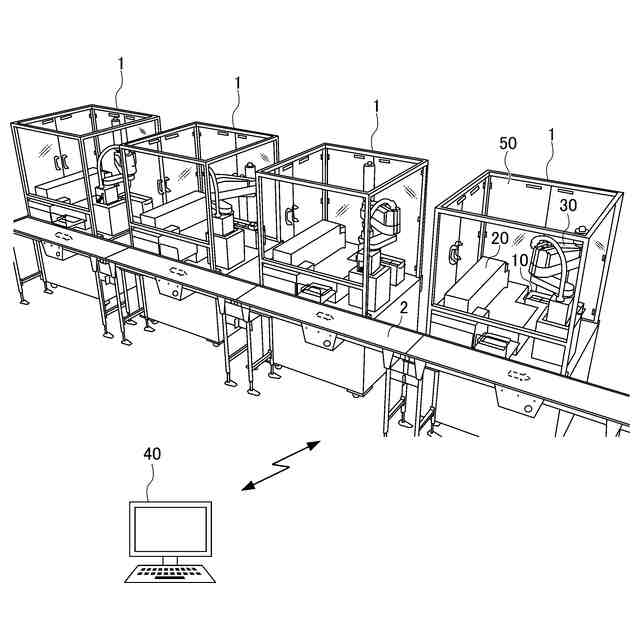
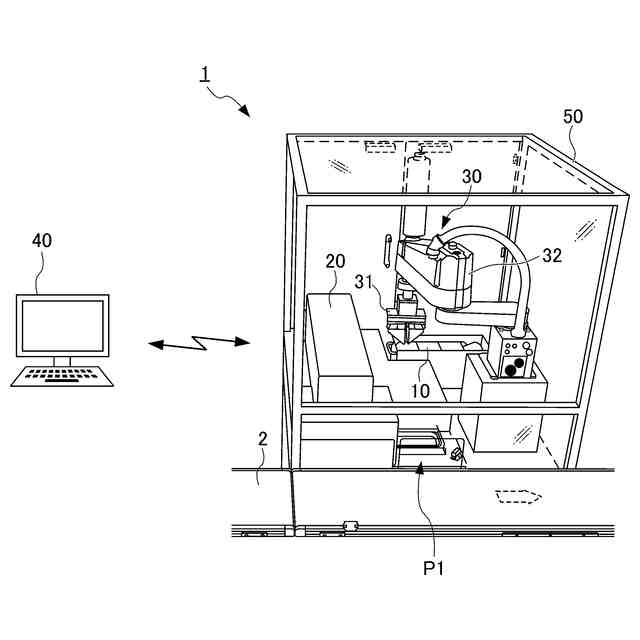
本発明に係る把持システム1が複数並べられた状態を示す斜視図である。
本発明に係る把持システム1の主要部を拡大した斜視図である。
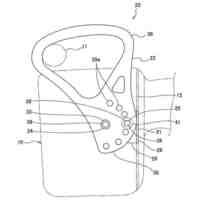
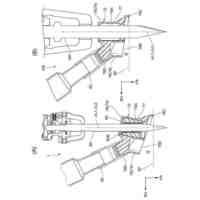
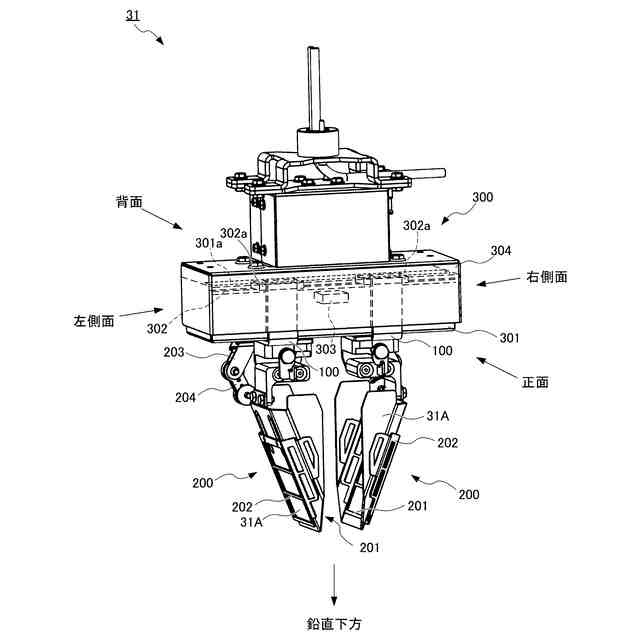
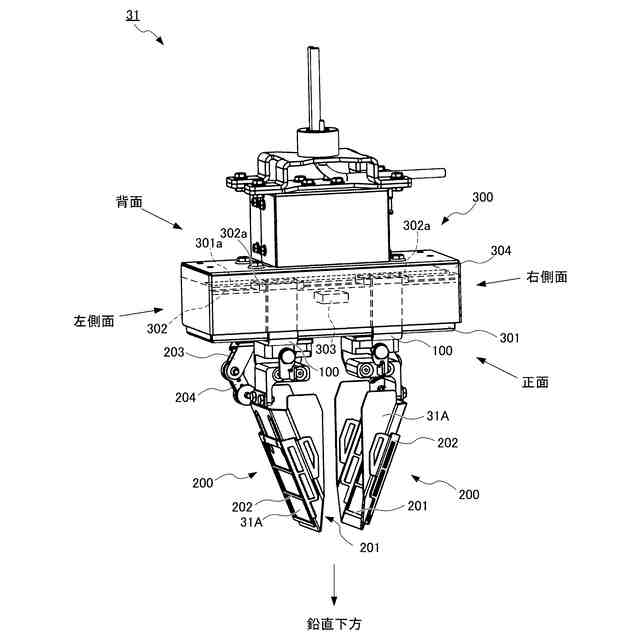
ハンドユニット31の構成を示す模式図(斜視図)である。
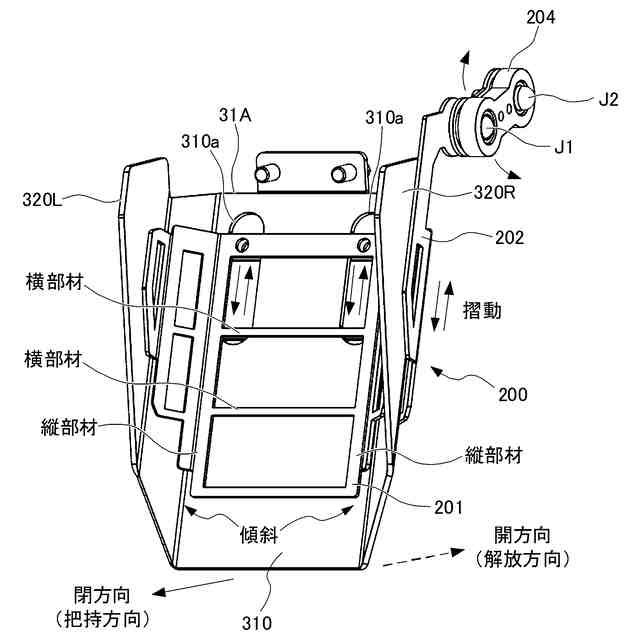
把持部材31Aの構成を示す模式図(斜視図)である。
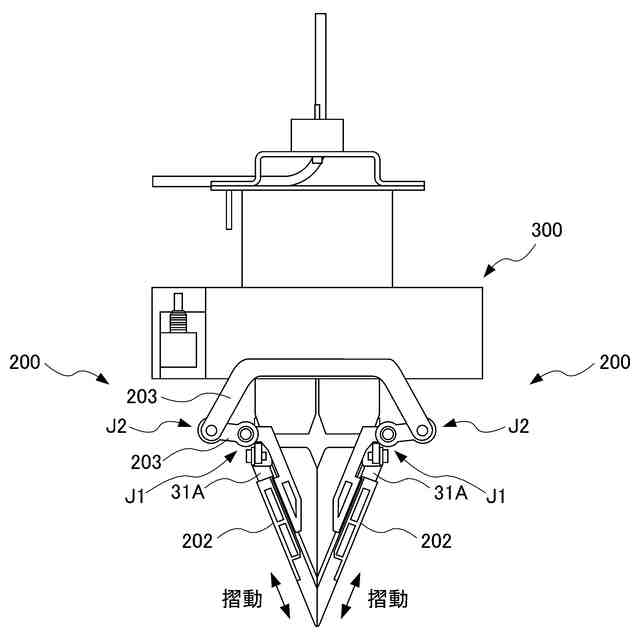
把持システム1のスクレープ動作を示す模式図(把持部材31Aを閉じた状態(閉状態)の背面図)である。
把持システム1のスクレープ動作を示す模式図(把持部材31Aを閉じた状態(閉状態)の右側面図)である。
把持システム1のスクレープ動作を示す模式図(把持部材31Aを最も開いた状態(開状態)の背面図)である。
把持システム1のスクレープ動作を示す模式図(把持部材31Aを最も開いた状態(開状態)の右側面図)である。
把持システム1のスクレープ動作を示す模式図(把持部材31Aが開状態と閉状態との間の状態(中間状態)の背面図)である。
把持システム1のスクレープ動作を示す模式図(把持部材31Aが開状態と閉状態との間の状態(中間状態)の右側面図)である。
スクレーパー201,202が把持部材31Aにおける上方にスクレープ動作を行う状態を示す模式図である。
スクレーパー201,202が把持部材31Aにおける下方にスクレープ動作を行う状態を示す模式図である。
スクレーパー201,202における横部材の断面形状を円形とした場合のスクレープ動作を示す模式図である。
スクレーパー201,202における横部材の断面形状を楔形とした場合のスクレープ動作を示す模式図である。
スクレーパー201,202における横部材の断面形状を楔形が連結された形状(上方及び下方の両方向に楔形となる形状)とした場合のスクレープ動作を示す模式図である。
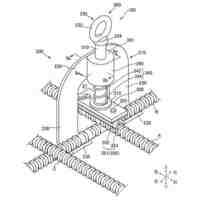
変形例5におけるハンドユニット31の構成を示す模式図(正面図)である。
変形例5におけるハンドユニット31の構成を示す模式図(斜視図)である。
変形例5におけるハンドユニット31のスクレープ動作を示す模式図である。
変形例6におけるハンドユニット31のスクレープ動作を示す模式図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して説明する。
[実施形態]
[構成]
図1及び図2は、本発明に係る把持システム1全体の構成を示す模式図であり、図1は、把持システム1が複数並べられた状態を示す斜視図、図2は、把持システム1の主要部を拡大した斜視図である。
本実施形態における把持システム1は、本発明に係る作業システムの一実施形態を表すものであり、材料を盛り付けるシステムに本発明を適用することを想定したものである。以下の説明においては、把持システム1が、対象物として惣菜等の具材を把持し、この具材を個別の惣菜の容器に盛り付ける場合を例に挙げて説明する。なお、この個別の惣菜の容器への盛りつけは例示に過ぎず、他にも、例えば、複数の惣菜のそれぞれを、弁当の容器の対応する領域に個別に盛り付ける用途等に本実施形態を適用することも可能である。また、以下の説明において、盛り付けられる具材の量として、重量を例に挙げて説明するが、本発明は、重量以外であっても、体積、かさ、質量等、各種呼称の物理量を対象に適用することが可能である。
【0010】
また、本実施形態における把持システム1は、パッシブな機構でスクレープの動作を行う機能を備えている。
スクレープの機能によって、把持システム1の作業部材に付着した対象物を剥離することで、作業部材に付着した対象物が、対象物を把持する動作を妨げたり、把持する対象物の量に誤差が生じたりする事態を抑制することができる。
なお、パッシブな機構とは、スクレープ動作の少なくとも一部を駆動源無しで行う機構を意味する。本実施形態における把持システム1では、作業における作業部材の動きに従動して、スクレープの動作が行われる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
カプラ接続治具
今日
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
12日前
アピュアン株式会社
衝撃工具
1か月前
株式会社不二越
協働ロボットシステム
17日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
ロボットシステム
6日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
21日前
コネクテッドロボティクス株式会社
保持システム
14日前
株式会社マキタ
打撃工具
17日前
川崎重工業株式会社
作業設備
18日前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
タイガー産業株式会社
アタッチメント
4日前
株式会社マキタ
打撃工具
21日前
北越メタル株式会社
鉄筋保持具
17日前
トヨタ自動車株式会社
ピッキングロボット装置
25日前
AMATAMA株式会社
制御装置
1か月前
コネクテッドロボティクス株式会社
ロボットシステム
14日前
株式会社永木精機
締結用回動体
1か月前
日産自動車株式会社
ロックプレートの圧入治具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ